(1.中國移動通信集團有限公司,北京 100032;2.中國移動通信有限公司研究院,北京 100053)
0 引言
面向2030 年,6G 將推動社會走向“數字孿生”和“智慧泛在”,實現虛擬世界和物理世界的融合交互[1]。智慧工業、智能交通、智慧醫療、智能交互等新興業務場景的不斷涌現,驅動著通信、計算、人工智能、大數據、安全等技術的深度融合[2]。除傳統通信能力的提升之外,6G 網絡還將打造與通信融合為一體的計算、感知、人工智能和安全等全新能力,以更好地支持未來全新的應用場景需求。在工業互聯網、無人機、車聯網等應用場景中,信息交互的維度已經從傳統的信息傳遞擴展到信息采集、信息計算[3],位置和目標感知能力和通信能力已經成為不可或缺的能力需求。所以,感知和通信的融合已經成為6G 研究的重要方向,而移動通信系統與雷達感知系統在信息處理流程、工作頻段、大規模天線陣列應用等方面呈現出的高度相似性也為二者的融合提供了基礎。
通信感知一體化技術通過傳輸信號一體化、硬件架構一體化等聯合系統設計,可在同一套設備、同一段頻譜上,同時實現通信與感知功能,帶來設備成本降低、頻譜利用率提升等增益[4]。一方面,通信感知一體化使基站具備通信、目標檢測、高精度測距測速,以及目標成像和識別的能力,可以更好地滿足眾多全新應用場景的需求[5-6],包括無人機、工業互聯網和車聯網等環境下的交通狀態監控、低空狀態監控、汽車對自動駕駛環境的感知、機器人之間的交互等。另一方面,感知信息反過來也可以用于輔助通信網絡的部署與參數配置的優化。
通信感知一體化技術作為6G 的熱點研究方向,學術界對其進行了大量的研究。文獻[7-10]對通信感知一體化的發展以及未來研究趨勢進行了詳細的討論,并從性能折中、信號處理、通信輔助感知、感知輔助通信四大方面闡述了通信感知一體化優勢以及協作增益。針對智能交通及自動駕駛的場景,文獻[11]對調頻連續波雷達、多輸入多輸出(MIMO,multiple input multiple output)雷達、頻率捷變雷達、正交頻分復用(OFDM,orthogonal frequency division multiplexing)雷達等感知方式進行了充分的分析與對比。此外,針對無人機場景,文獻[12-14]從無人機之間的通信與感知功能、無人機對地面物體的感知、移動網絡與無人機之間的通信感知一體化等方面進行了詳細的討論。除了對應用場景、發展趨勢與技術挑戰的研究,針對通信感知一體化基礎理論的研究是該方向的技術根基。相關學者對通信與感知一體化系統中的克拉美羅界進行了系統的推導[15-17]。此外,文獻[18]針對通信感知一體化的信道,利用瑞利信息熵定義了感知的自由度,并以此來分析通信與感知一體化系統的分集增益。
基于現有蜂窩網絡OFDM 波形進行通信感知一體化設計,實現對目標物體的感知,是目前通信感知一體化研究的技術路線之一,可最大程度降低對通信系統的設計和硬件的影響,具有更好的產業可實現性。本文研究將圍繞這一技術路線展開。通過對收發端OFDM 信號進行聯合處理,可利用周期圖法得到感知目標的位置信息[4,19-20]。除了周期圖法,文獻[21-23]利用信號-噪聲子空間分離的方法,可以得到目標物體的距離、速度、角度等信息。文獻[24-25]對OFDM 通信感知一體化系統的功率分配、旁瓣干擾、峰均比等方面提出了對應算法并進行了優化。此外,針對射頻硬件架構,文獻[26-27]對功率放大器、頻率合成器、混頻器等進行了設計,并進行了實驗與調測。針對單站感知的場景,文獻[28]基于OFDM 信號進行系統設計,并針對收發間自干擾問題提出了射頻與以及數字域的解決方案,并對靜止目標以及移動目標進行了感知的外場測試。除了單站感知的方式,文獻[23,29]等對多節點協作感知也進行了設計,并針對智能交通場景,利用OFDM 信號對汽車、行人等進行了感知定位。
值得注意的是,文獻[19,23]在性能分析與系統設計時,側重于算法在感知精度方面的性能,并未過多地討論通信性能。文獻[5,7-8]雖然考慮了通信感知一體化系統中的波束成形、幀結構、干擾管理等通信方面的設計,但是并未討論感知資源與通信資源的分配問題。在通信感知一體化系統中,通信與感知性能相互耦合。一般而言,在總資源相同的情況下,用于感知的資源越多,通信性能下降越大。由于不同感知算法的感知精度、達到某一感知精度時所占用感知資源、計算復雜度不同,在通信感知一體化系統設計時,通信性能與感知性能的聯合優化是十分必要的。
本文針對蜂窩通信感知一體化系統,以保障通信速率的同時實現感知精度提升為準則,對3 種基于OFDM 信號的多目標感知算法進行分析及優化設計,提出了一種自適應感知算法。該算法根據接收信號與干擾加噪聲比(SINR,signal-to-interference-plus-noise ratio)測量結果選擇合適的感知算法實現感知。相比使用單一算法,所提算法可保證在通信速率不變的情況下,實現感知精度的提升。本文主要創新點如下。
1) 介紹了3 種多目標感知算法,對算法的感知精度、感知資源占用情況及通信性能進行聯合分析,并對感知算法的復雜度進行定量分析與對比。
2) 以保障通信速率不變的同時盡可能提升感知精度為優化準則,提出了一種自適應感知算法。
3) 在給定的系統參數下,通過鏈路級仿真平臺驗證高頻通信感知一體化系統不同算法的感知性能及計算復雜度性能。
1 系統模型
如圖1 所示,本文針對移動蜂窩網絡,研究通信感知一體化技術的感知算法設計問題,利用現有蜂窩網絡中規模部署的基礎設施及網絡架構,實現低成本、廣覆蓋范圍的通信和感知。該通信感知一體化系統同時具備通信與感知功能,其中基站(BS,base station)在與用戶進行數據傳輸的同時,可通過發射感知信號并接收對應的回波信號,完成未知目標的檢測及距離與速度估計等感知任務。為減少/避免對現有移動通信網絡硬件的大幅改造,本文考慮在現有移動通信網絡基礎上增加感知功能,即利用通信常用的OFDM 信號對未知目標進行估計。
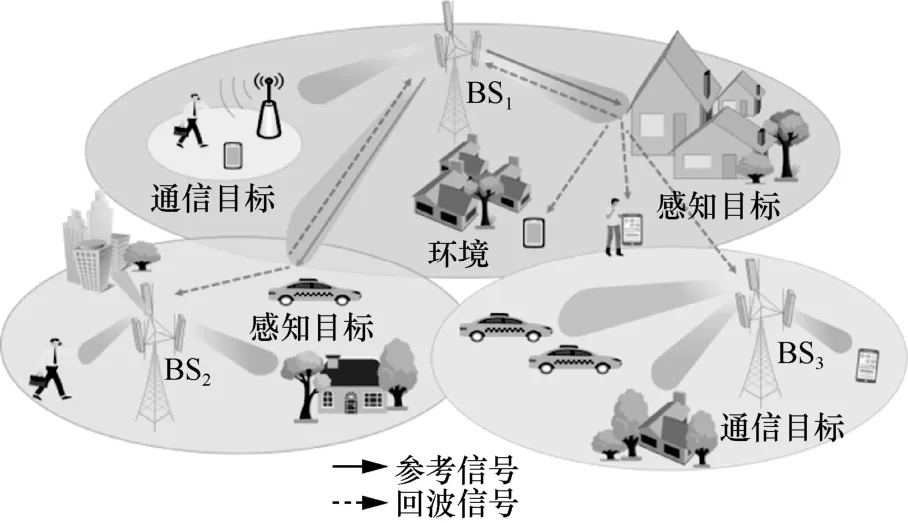
圖1 通信感知一體化系統
對于每次感知,BS 發射用于感知的OFDM 信號,假設該信號由K個子載波和L個符號構成,子載波間隔為Δf,數據傳輸時長為。引入時間長度為TCP的循環前綴(CP,cyclic prefix)來對抗多徑干擾,一個OFDM 符號的持續時間為TOFDM=T+TCP。因此,發射端用于感知的OFDM 基帶信號表示為
其中,sl(k)為第k個子載波上第l個符號對應承載的調制符號;f k=kΔf為第k個子載波對應的頻率;為方波,用于描述第l個OFDM 符號的矩形窗,其計算式為
OFDM 感知信號經過待測目標反射后到達接收端,經過匹配濾波、CP 刪除和離散傅里葉變換等過程,接收端從基帶接收信號中提取距離及速度信號。假設在BS 感知范圍內有M個待測目標,第m個目標與基站的相對距離及相對速度分別為Rm和vm,則接收信號會在原始發射信號的基礎上引入由傳輸時延及多普勒頻移導致的相位差。因此,接收時域信號可表示為
其中,hm,k為信道增益,c為光速,λ為波長,n(t)為白噪聲,服從均值為0、方差為δ2的高斯分布。
接收的時域信號經過傅里葉變換,得到頻域信號可表示為
為便于觀察,將發射端與接收端OFDM 符號分別整理成二維信號矩陣形式,如式(4)和式(5)所示。二維信號矩陣的每一行為一個子載波上的傳輸數據,每一列為一個OFDM 符號上的傳輸數據。
2 OFDM 多載波感知算法
2.1 2D-DFT 感知算法
二維離散傅里葉變換(2D-DFT,two dimensional-discrete Fourier transform)算法是較常見的OFDM 感知算法[20],其核心是對時頻域信道信息矩陣進行二維離散傅里葉變換,將時頻域信道轉換至時延多普勒域。然后通過對時延多普勒域的周期圖譜進行譜峰搜索,估計感知目標與基站之間的時延及多普勒信息,進而得到目標物體的距離及速度信息。這種通過二維離散傅里葉變換將時頻域信道轉換至時延多普勒域的方法,使感知目標的時延及多普勒信息的展現更加直觀。相比于直接處理時頻域信道,2D-DFT 更易于實現高精度感知。
2D-DFT 算法的具體實現如下。令發射信號經過感知目標m反射至接收端時的傳播時延為τm,多普勒為fD,m,將接收信號與發射信號進行點除,提取信道信息,得到信道轉換函數Tdiv。
其中,FTx(k,l)及FRx(k,l)分別是第l個符號、第k個子載波上的基帶發送及接收OFDM 信號,hm是第m個目標的信道增益,nk,l~CN(0,σ2)是加性白高斯噪聲。當感知目標m和基站的距離為Rm時,對同一個OFDM 符號,每個子載波會經歷時延。假設感知目標靜止,則對于任意OFDM符號l,其對應的信道轉換函數為
類似地,當感知目標m和基站的相對速度為vm時,對于同一個子載波,每一個OFDM 符號會經歷線性頻偏,該頻偏是由多普勒頻率引起的。若只考慮多普勒頻偏,則對于任意子載波k,其對應的信道轉換函數為
同樣地,當式(11)中指數項抵消時,取到最大值。因此,對目標m=1,…,M,只需找到 {g(q) }q=1,…,Q峰值對應的索引qmax_index,m,即可求出目標速度vm為
根據上述分析,2D-DFT 算法的核心是對Tdiv的每列(即頻率軸)做IDFT,并對每行(即時間軸)做DFT,得到其周期圖譜并找到峰值,該峰值對應的二維索引即目標物體的距離和速度信息。周期圖譜法如算法1 所示。
算法1周期圖譜法
初始化感知子載波集K,感知符號集L,感知目標個數M
2.2 旋轉不變子空間法
本節給出了一種基于旋轉不變子空間[22](ESPRIT)的感知算法,實現對感知目標的測距與測速。首先,將接收信號分成相位差相等且僅與時延相關的兩組。該相位差被稱為旋轉不變因子。其次,通過對接收信號協方差矩陣進行估計,獲得兩組信號間旋轉不變因子。最后,通過旋轉不變因子與時延的關系對感知目標的時延進行估計。將OFDM 符號與子載波互換,采用相同算法可實現對感知目標多普勒的估計。
2.2.1 數據分組
將接收信號y(t)進行匹配濾波,可得到一組歸一化基帶OFDM 接收信號為
為噪聲向量。式(13)可寫為
為估計時延,將y拆分為y1及y2,使其各個對應元素間相位差相等且與除時延外其他未知量無關。例如,取y1為y的第一位至倒數第2 位元素,取y2為y的第2 位至最后一位元素。此時,y1與y2對應元素相位差為2πΔfτm。根據數學推導可得
其中,phase{a} 表示取元素a的相位。
2.2.2 旋轉不變因子估計
本節給出基于ESPRIT 的估計算法。將向量y1與y2堆疊構成向量y3=((y1)T,(y2)T)T,將矩陣F1與F2堆疊構成矩陣F3=((F1)T,(F2)T)T,則有
其中,n3是對應的噪聲向量。下面,本文算法將通過y1與y2估計旋轉不變因子。為此,定義a的協方差矩陣為Ra,根據式(21)可得
其中,I是維數為2(K-1)×L的單位矩陣。定義Ra的前M個最大特征向量構成的特征矩陣為Ea。由于感知系統存在M個感知目標且式(21)成立,與F3分別擴張成了y3的信號空間。因此,存在一個非奇異矩陣T,使式(24)成立。
根據式(19)可得
式(25)表明旋轉不變因子Φ是矩陣γ的特征矩陣,前者可由對矩陣γ進行特征值分解得到。因此旋轉不變因子的估計可轉化為對矩陣γ的估計。由于可由y1,y2,y3計算出,根據式(25),通過最小二乘法,γ的估計值可由式(27)計算得出。
綜合本節內容,ESPRIT 算法如算法2 所示。
算法2ESPRIT 算法
初始化感知子載波集K,感知符號集L,感知目標個數M
將接收信號的符號與子載波互換,采用相同算法即可得到對感知目標多普勒的估計。通過類似的理論推導,在進行多普勒估計時,旋轉不變因子。在得到的估計之后,感知目標的估計速度由式(29)得出。
2.3 多重信號分類算法
多重信號分類(MUSIC,multiple signal classification)算法是一種經典的基于信號子空間和噪聲子空間正交性的譜峰搜索算法[30],已在角度估計中得到廣泛應用。本節依據OFDM 系統中正交的子載波及符號與測向中陣元天線的相似性,進一步應用MUSIC 算法實現多目標的測速與測距,即如何利用MUSIC 算法獲取目標的時延及多普勒信息。在算法實現過程中,將基于頻域軸上等間隔的子載波構建時延導向矢量以獲得待測目標的時延信息,類似地,將基于時間軸上等間隔的OFDM 符號構建多普勒導向矢量以獲得待測目標的多普勒信息。
根據式(6),進一步分析信道轉換函數Tdiv可知,接收機與目標間的相對距離在連續子載波上的調制符號之間引入線性頻偏,相對速度對應的多普勒頻移在連續的OFDM 符號間引入線性相位。此外,時延及多普勒頻移對調制符號造成的影響相互獨立且正交。
下面基于相對距離及相對速度對調制域OFDM 符號影響的正交性實現時延及多普勒參數估計。首先,計算回波信號的協方差矩陣。根據上述分析,需要從Tdiv的每列及每行自相關矩陣中分別提取時延及多普勒信息,構造測距及測速協方差矩陣分別為
其次,基于協方差矩陣構建噪聲子空間。將協方差矩陣RR與Rv奇異值分解,分別利用小特征值對應的特征矢量構建噪聲子空間UR和Uv。
再次,構建感知信號導向矢量。根據發射信號的時頻結構,可構建頻域軸和時域軸對應的信號導向矢量,分別表示為
最后,進行譜峰搜索以獲得目標的距離及速度。由于噪聲的存在,噪聲子空間與信號子空間并不完全正交,因此在計算時搜索式(4)的峰值,測距和測速的譜峰搜索式可表示為
將式(32)和式(33)中的R和v作為變量,通過對PR和Pv進行譜峰搜索來估計相對距離和速度。峰值對應的距離與速度即待測目標的速度與距離信息,可適用于多目標場景。對于基于MUSIC 算法實現的感知過程,其譜峰搜索過程中的搜索步長越小估計性能越好。綜合本節內容,MUSIC 算法實現步驟如算法3 所示。
算法3MUSIC 算法
初始化感知子載波集K,感知符號集L,感知目標個數M
1) 輸入收發OFDM 信號對應的二維信號矩陣,進行元素點除操作得到關于多待測目標的信道信息矩陣Tdiv;
2) 基于信道信息矩陣Tdiv構建測距協方差矩陣
3) 對協方差矩陣RR進行奇異值分解,并利用小特征值對應的特征矢量構建噪聲子空間UR;
4) 根據發射信號的時頻結構構建頻域軸對應的信號導向矢量AR;
5) 以R作為搜索變量,對PR進行峰值搜索,獲得M個峰值
6) 輸出峰值對應的目標距離Rm,m=1,…,M。
類似地,利用多普勒相關測速協方差矩陣Rv與導向矢量Av,通過譜峰搜索即可估計感知目標的速度。
3 性能分析及自適應感知算法設計
本節首先從感知精度、感知資源占用情況及通信速率性能對上述3 種算法進行分析,然后比較3 種算法的計算復雜度。通過分析可得出單獨使用上述3 種算法無法達到感知精度、通信速率及感知次數的最優。最后設計一種自適應算法,根據接收SINR 測量值的不同,切換不同感知算法,在占用通信資源數不變的情況下,達到感知精度的提升。
3.1 感知精度、感知資源占用情況及通信速率性能分析
首先,對3 種感知算法的感知精度進行分析。感知精度性能受限于克拉美羅界,總體來說,與感知資源個數、接收SINR 有關。定義γ為接收信號的SINR,根據文獻[20,31-32],采用2D-DFT 算法的估計誤差與和二維離散傅里葉點數取值有關,采用ESPRIT、MUSIC 算法的估計誤差與和信號空間的選擇方法有關。結合文獻[32]的分析結果,令2D-DFT、ESPRIT 及MUSIC 算法在關于接收SINR 收斂時的估計誤差分別為EDFT、EESP和EMUS,滿足
其次,從感知資源占用情況及通信速率性能的角度對3 種感知算法進行分析。由于2D-DFT 算法估計誤差與有關,ESPRIT 及MUSIC 算法估計誤差與有關,因此在達到相同感知精度時,2D-DFT 算法的最小接收 SINR 比 ESPRIT 及MUSIC 算法更低。令γDFT、γESP、γMUS分別為2D-DFT、ESPRIT、MUSIC 算法在成功感知目標且估計誤差相同時所需最小接收SINR。根據文獻[29],在占用相同感知資源的情況下,為達到同一較低估計誤差,3 種算法所需的最小接收SINR 滿足
本文在圖2 和圖3 中分別展示了3 種算法在不同接收SINR 情況下的測距及測速均方根誤差(RMSE,root mean square error)仿真結果。由圖2和圖3 可見,為達到相同RMSE,最小接收SINR越大,需要占用用于感知的資源越多。假設系統總資源數相同,使用2D-DFT 算法實現感知時,系統可用于通信的資源最多、通信速率最高,其次是ESPRIT 算法,最后是MUSIC 算法。例如,圖3 表明,為達到2 m 測距精度(測距均方根誤差為102m),2D-DFT、ESPRIT、MUSIC 算法所需的最小接收SINR分別為-26 dB、-24 dB、-22 dB。因此,為達到相同感知精度需求,相比于2D-DFT 算法,ESPRIT 與MUSIC 算法需要分別消耗1.5 倍及2.5 倍資源用于感知。假設系統采用2D-DFT 算法時資源用于感知,資源用于通信,則采用ESPRIT 和MUSIC 算法時,通信速率將分別減小25%及75%。
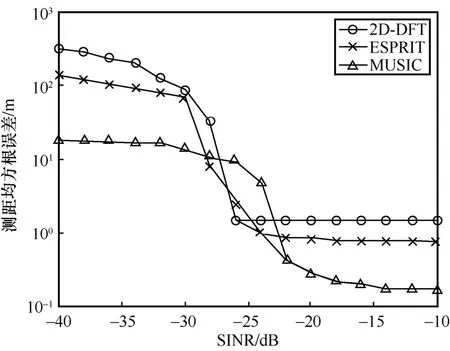
圖2 3 種算法接收SINR 與測距均方根誤差之間的關系
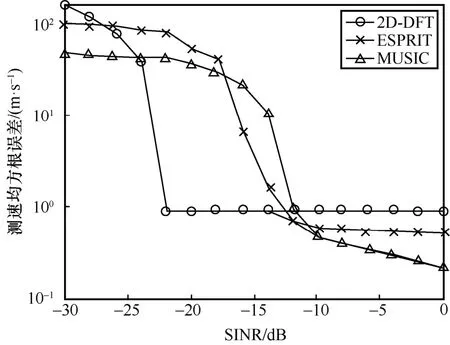
圖3 3 種算法接收SINR 與測速均方根誤差之間的關系
從上述對感知精度及通信速率的分析可以看出,在上述3 種算法中,盡管2D-DFT 算法感知精度最低,但是其通信速率最高;MUSIC 算法感知精度最高,但是其通信速率最低;ESPRIT 算法居于兩者中間。
3.2 計算復雜度分析
本節對不同算法計算復雜度進行分析,用于定量比較不同算法理論上處理時延的大小。本文算法復雜度的影響因素主要包括快速傅里葉變換(FFT)和逆變換過程、協方差矩陣構造過程、奇異值分解過程、特征值分解過程、矩陣求逆過程、矩陣相乘過程、偽譜構造過程以及譜峰搜索過程等。其中,N點快速傅里葉變換及其逆變換的計算復雜度為Ο(NlogN),假設向量為n維,矩陣為n×n維方陣,則向量與矩陣相乘的計算復雜度為Ο(n2),矩陣乘法的時間復雜度為Ο(n3)。協方差矩陣構造過程涉及一次矩陣乘法則其計算復雜度同樣為Ο(n3);奇異值分解過程包括2 次矩陣乘法和2 次特征值分解,其中特征值分解的復雜度為 2Ο(n3),總的計算復雜度為 6Ο(n3);矩陣求逆的計算復雜度與矩陣乘法復雜度相同,為Ο(n3);對于N點采樣的頻譜,其譜峰搜索的復雜度為Ο(logN),對于MUSIC 算法,其每次譜函數的構造都是一次向量與矩陣相乘再乘以向量的過程,其計算復雜度可以視為2 次向量與矩陣相乘,為2O(n2)。3 種算法的計算復雜度如表1 所示。

表1 3 種算法的計算復雜度對比
以表2 為仿真參數的6G 高頻通信感知一體化系統為例,當系統快速傅里葉變換點數為4 096 時,復雜度分析參數N= 4096,n=132,M= 4 096。從表1 可以看出,2D-DFT 算法復雜度最低,其次為ESPRIT 算法,MUSIC 算法復雜度最高。因此,盡管感知精度最低,在相同感知時間內,2D-DFT 算法感知次數最多,其次為ESPRIT 算法,MUSIC 算法最少。

表2 鏈路級仿真參數及配置
3.3 自適應感知算法設計
從上述分析可知,感知精度較低的算法具有更高的通信速率及更低的計算復雜度。單獨使用上述3 種算法均無法得到感知精度、通信速率及感知次數的最優。因此,有必要設計一種自適應感知算法,根據不同接收SINR 選擇合適的算法實現感知,在相同通信速率的情況下,達到感知精度的最大化。
自適應感知算法具體操作步驟如下。首先,基站向環境中發射感知參考信號,參考信號被感知目標反射后形成回波被基站處的感知接收機接收。然后,基站對回波信號的接收SINR 進行測量,根據不同SINR 的取值從2D-FFT、MUSIC 及ESPRIT中選擇一個合適的算法,使系統的感知精度最高。
根據式(37)中3 種感知算法在達到較低估計誤差時最小接收SINR 的關系,定義θ0<θ1<θ2<θ3為感知算法的切換閾值,可由先驗仿真或者系統實際測試得到。以最小化感知參數最小均方誤差為目標,根據圖2 所示的仿真結果,自適應感知算法在不同SINR 情況下的選擇準則如下。
1) 當γ<θ0時,感知算法誤差大,感知失敗,默認采用2D-DFT 算法測距;
2) 當θ0≤γ<θ1時,采用2D-DFT 算法測距;
3) 當θ1≤γ<θ2時,采用ESPRIT 算法測距;
4) 當γ≥θ2時,采用MUSIC 算法測距。
針對目標測速問題的自適應感知算法與測距相似。綜合本節內容,自適應感知算法如算法4 所示。
算法4自適應感知算法
初始化感知子載波集K,感知符號集L,感知目標個數M,算法切換閾值θ0、θ1、θ2、θ3
4 仿真結果
為減少/避免對6G 通信基本鏈路和性能的影響,本文考慮利用通信常用的OFDM 信號進行通信業務傳輸以及對未知目標的參數估計。在未知目標參數估計過程中,為評估2D-DFT、ESPRIT、MUSIC 及自適應感知算法在實際移動通信系統下的感知性能,本節基于時分雙工(TDD,time division duplexing)移動通信系統以及宏蜂窩(UMA)應用場景展開,采用物理下行共享信道(PDSCH,physical downlink shared channel)進行鏈路級仿真評估,信道模型為簇延時線模型(CDL,clustered delay line)。仿真參數如表2 所示,通信感知一體化工作頻段為26 GHz,帶寬100 MHz,探測目標距離為300 m,探測目標速度為20 m/s。仿真過程中采用解調參考信號(DMRS,demodulation reference signal)作為感知導頻,可在不影響通信吞吐的前提下實現目標感知,通信數據和感知導頻映射方式如圖4 所示。
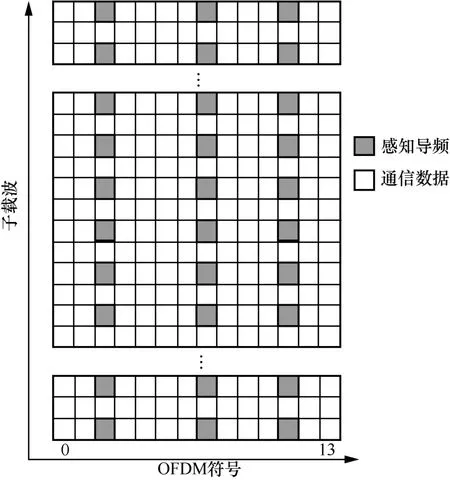
圖4 PDSCH 中通信數據和感知導頻映射方式
鏈路級仿真性能評估的主要評價指標包括測距精度和測速精度,通過500 次蒙特卡羅仿真獲得。感知精度由參數估計值與真實值的最小均方根誤差刻畫。令待估參數測量次數為Nsamp,待估參數真實值為θ,第i次估計值為,RMSE 計算式為。
圖5 對比分析了4 種算法的測距性能。從圖5中可以看出,4 種算法的測距精度在不同SINR 下呈現差異性。當接收SINR<-26 dB 時,4 種算法測距誤差較大,此時感知失敗。當接收SINR≥-26 dB 時,隨著SINR 的增加,4 種感知算法感知精度逐漸降低。當感知精度收斂后,2D-DFT、ESPRIT、MUSIC 算法測距精度分別為1.45 m、0.76 m、0.17 m。當達到1 m 測距精度(測距均方根誤差為101m)時,ESPRIT和MUSIC算法的接收SINR分別為-24 dB和-22 dB。相比上述3 種算法,在感知成功的情況下(接收SINR≥-26 dB),自適應感知算法的估計誤差曲線不高于其他任一感知算法誤差曲線,表明其測距精度為4 種算法中的最優。
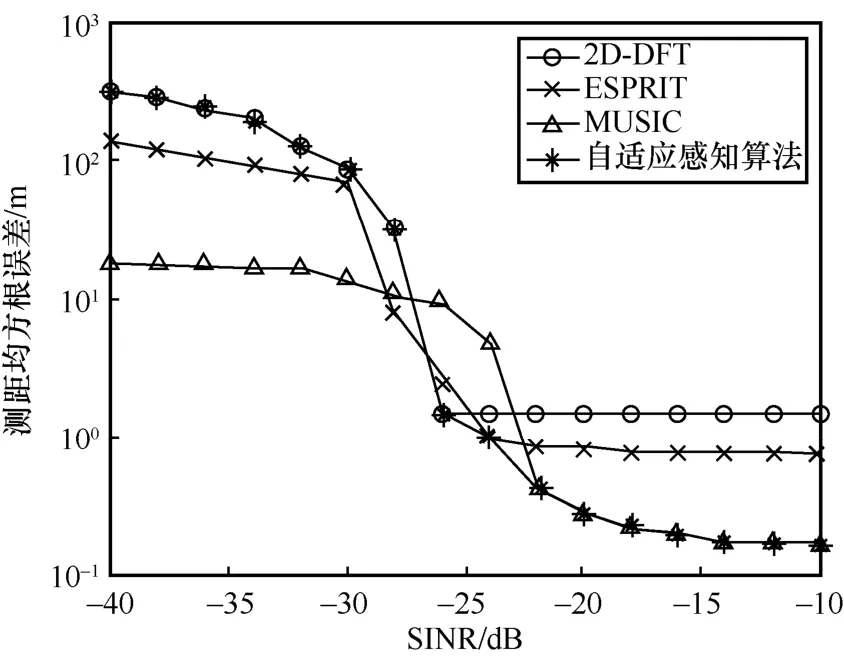
圖5 4 種算法接收SINR 與測距均方根誤差之間的關系
圖6 對比分析了4 種算法的測速性能。當接收SINR<-22 dB 時,4 種算法測速誤差較大,此時感知失敗。當接收SINR≥-22 dB 時,與測距結果類似,隨著接收SINR 的增加,4 種感知算法測速精度逐漸降低。當測速精度達到1 m/s(測速均方根誤差為101m/s)時,2D-DFT、ESPRIT、MUSIC算法接收SINR 分別是-22 dB、-13 dB、-12 dB。算法收斂后,2D-DFT、ESPRIT 算法測速估計誤差分別為0.92 m/s、0.53 m/s。與前兩者不同,MUSIC 算法隨著SINR 的提升,測速估計誤差可進一步降低。相比上述3 種算法,在感知成功的情況下,自適應感知算法測速估計誤差曲線不高于其他任一感知算法誤差曲線,表明其測速精度優于上述3 種算法。
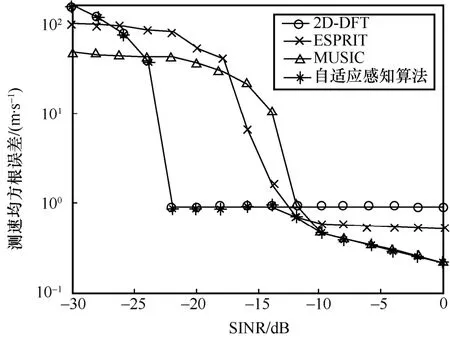
圖6 4 種算法接收SINR 與測速均方根誤差之間的關系
圖7 描述了4 種算法在達到期望的探測精度(1 m 測距精度、1 m/s 測速精度)時所對應的最大通信速率增益。由于不同感知算法在達到同一感知精度時對接收SINR 的要求不同,系統需要配置不同數量的資源用于感知。在感知與通信總資源相同的情況下,不同感知算法對應的通信速率不同。在測距方面,自適應感知算法與ESPRIT 算法實現感知的通信速率相同,且通信速率最高。MUSIC 算法通信速率比ESPRIT 算法下降60%。由于2D-DFT算法無法達到1 m 的測距精度,設定系統分配所有資源用于感知,因此通信速率為0。在測速方面,自適應感知算法與2D-DFT 算法通信速率相同,ESPRIT 次之,MUSIC 最低。綜合比較測距與測速時的通信速率可知,所提出的自適應感知算法的最大通信速率增益優于其他3 種算法。

圖7 不同算法在達到期望的探測精度時的最大通信速率增益
為評估算法計算復雜度,表3 進一步對比分析了3 種算法的運行時間。仿真過程采用16 核Intel(R) Xeon(R) W-2245 CPU 工作站進行運算。以圖5 測距性能分析為例,2D-DFT、ESPRIT、MUSIC 這3 種算法的運行時間分別為2.4 ms、856.4 ms、9 708.7 ms,與第3 節理論分析結論一致。對比上述算法及自適應感知算法,自適應感知算法復雜度始終不高于MUSIC,且僅在接收SINR≥-26 dB測距(或SINR≥-12 dB 測速)及接收SINR≥-22 dB測距(或SINR≥-10 dB 測速)時分別高于2D-DFT及ESPRIT。結合圖3 和圖4 可知,由于自適應算法感知誤差更低,其較高的計算復雜度是可接受的。
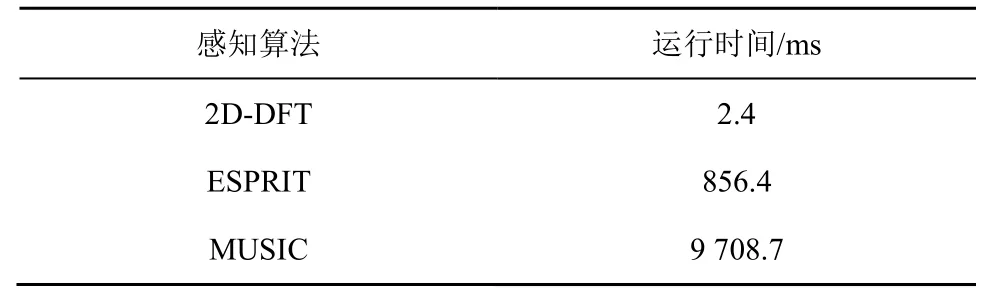
表3 不同感知算法在測距時的運行時間
綜合上述分析可知,2D-DFT 具有最低收斂SINR、低復雜度的優勢,但其測距或測速精度受限,而ESPRIT、MUSIC 可在較高SINR 條件下達到期望的測距和測速精度需求,但其代價是較高的計算復雜度。因此,面向6G 融合多元化的應用場景,可綜合精度需求、計算復雜度等因素靈活選取或切換不同感知算法,滿足不同應用場景下的需求。例如,對于精度要求不高,或感知時延敏感,或設備處理能力受限的場景,可優先采用2D-DFT 算法。對于精度要求較高,或感知時延不敏感,或設備處理能力較強的場景,可進一步考慮ESPRIT、MUSIC 算法。通過靈活選取或切換算法,實現感知性能與復雜度較好的折中。
5 結束語
本文研究基于OFDM 波形的通信感知一體化融合算法設計及優化,首先給出了基于OFDM 波形的通信感知一體化系統模型,介紹了3 種可實現多目標測距與測速的感知算法,并進行了相應的感知精度、感知資源占用、通信速率及計算復雜度的分析,可以看出單獨使用任一算法均無法達到感知精度、通信速率及感知次數的最優。基于上述分析,本文提出了一種自適應感知算法,在實際系統中,接收端通過對接收SINR 的測量選擇合適的感知算法實現感知,在通信速率不變的情況下,可實現對感知精度的提高。最后,本文通過鏈路級仿真驗證了感知算法的感知精度及計算復雜度。值得注意的是,除現有OFDM 波形外,6G 通信感知一體化系統還可引入新型波形實現系統性能的提升。基于新型波形技術的感知與通信性能聯合分析及方案設計將在未來的工作中研究。