(1.江蘇理工學院電氣信息工程學院,江蘇 常州 213001;2.東南大學移動通信國家重點實驗室,江蘇 南京 210096)
0 引言
未來6G 將為智能交通和自動駕駛技術的實現提供基礎,成為解決人們出行中對安全、高效、舒適以及智能化需求問題的重要途徑。作為上述技術的信息傳輸基礎,6G 中的車聯網將面臨連通性、通信速率、時延和可靠性等多種性能的嚴苛要求。由于車聯網的異構性、業務需求的差異性、車輛較強的動態性,以及車聯網通信距離有限等特征,車輛之間的上述通信指標難以得到保障[1-2]。
為了進一步提高系統性能和滿足未來車聯網通信需求,車聯網通信技術從單一的專用短程通信(DSRC,dedicated short range communication)發展到基于蜂窩的車聯萬物(C-V2X,cellular-vehicle to everything)技術,實現了蜂窩通信與自組織通信的融合。目前,典型的C-V2X 通信鏈路通常分為車與基礎設施(V2I,vehicle to infrastructure)通信和車與車(V2V,vehicle to vehicle)通信兩類[3-4]。車聯網中這兩類通信的用戶共享頻譜是提高車聯網頻譜利用率的重要技術之一,但共享頻譜也會帶來干擾問題,反過來會影響系統的頻譜效率[5]。為了減輕干擾的影響,文獻[6]在V2I 中斷約束下提出了V2V 吞吐量最大化問題,給出了最優的V2V發送端密度及其表達式,分析了V2I 中斷約束需求對V2V 平均吞吐量的影響。文獻[7]從V2V 和V2I 合作通信的角度,研究了恒相關和指數相關信道下的綜合誤包率,根據源節點和中繼節點的綜合效用函數,形成Stackelberg 博弈問題,得到了效用函數最大化下的發射功率。文獻[8]提出了一種自適應V2V 和V2I 動態傳遞選擇策略,利用多跳通信來保持車輛間連通性,給出了基站覆蓋范圍內的吞吐量和覆蓋范圍外的連通時間和服務恢復次數。但這些研究仍未能解決被動適應車聯網無線傳輸信道的局限性,車聯網通信覆蓋范圍仍受到障礙物阻擋的嚴重影響,車聯網通信覆蓋率、連通性和頻譜效率仍需進一步提高。基于智能反射面(IRS,intelligent reflecting surface)的車聯網通信系統可以在不增加路側單元或基站部署成本的前提下擴大車輛的覆蓋范圍和提升通信鏈路強度,使車聯網性能突破現有瓶頸,釋放出車聯網在未來激增應用上的潛力[9-10]。
IRS 通常由大量電磁單元排列組成,通過可編程的方式動態調控電磁單元的性質來對電磁波進行智能調控,進而增強信道復用增益和接收信號強度[11-12]。基于IRS 的新型無線通信傳輸技術作為6G系統物理層關鍵技術之一,近年來已經被廣泛證實,在無線通信網絡中部署IRS 可以改變傳統無線信道的不可控特性,實現未來無線網絡的覆蓋增強和容量提升[13-15]。IRS 通常部署在多天線通信系統中,通過聯合優化發送波束與IRS 上的反射波束可以有效提高系統容量或提升頻譜效率、減少發射總功率[16-19]。由于IRS 帶來的多徑以及主動調整波束帶來的信號增強優勢,IRS 也被證明可以有效輔助攜能傳輸和物理層安全設計[20-21]。此外,在一些特殊的網絡場景中,如物聯網、認知無線網絡、無人機通信系統等,通過部署IRS 來輔助無線通信,其系統能效、頻譜效率、網絡覆蓋能力等也可以得到明顯改善[22-26]。基于此,IRS 也被用于研究提升車聯網連通性、系統容量等問題。文獻[27-28]分析了IRS 輔助下車輛間通信的中斷概率、通信范圍、接收端誤比特率和系統吞吐量等性能指標,結果表明IRS在車聯網性能上可帶來明顯增益。文獻[29-30]研究了車聯網中IRS 輔助下的鏈路遍歷容量和平均誤符號概率,提出了多個IRS 的最優選擇策略。為了提高頻譜效率,IRS 輔助下V2I 和V2V 共存網絡的性能研究也十分重要。文獻[31]對V2I 和V2V 共存下的安全中斷概率進行了分析,給出了IRS 輔助下的安全中斷概率表達式。除了連通性等性能上的理論分析外,文獻[32]研究了V2I 和V2V 鏈路共存時的資源分配問題,在確保V2V 鏈路信號與干擾加噪聲比(SINR,signal to interference plus noise ratio)的約束下,以最大化V2I 用戶容量為目標,設計了最優的功率、頻譜資源分配和IRS 反射系數。但上述研究都沒有考慮多輸入多輸出(MIMO,multiple input multiple output)車聯網系統。文獻[33]以最大化最小接收信噪比為目標,研究了MIMO 車聯網場景下IRS 輔助多車輛與路側單元通信時的聯合波束成形方法。文獻[34]研究了IRS 輔助下發送端和IRS反射端的聯合波束優化方法,該方法針對毫米波頻段下的車聯網場景。文獻[35]則在毫米波車聯網中進一步給出了信道估計不完全情況下,發送端和IRS 端的穩健性波束成形設計方法。但這些研究未考慮V2I 和V2V 兩類鏈路共存的場景。綜上所述,研究基于IRS 輔助車聯網通信系統的聯合波束成形問題具有重要現實意義,但目前仍缺少V2I 和V2V共存下的MIMO 系統性能的研究。
針對以上所述MIMO 車聯網問題,本文具體研究工作如下。
1) 建立了V2I 和V2V 共存下基于IRS 輔助的MIMO 車聯網終端通信鏈路模型。在同時滿足V2V 用戶數據速率需求、V2I 基站發射功率受限和IRS 反射相移模約束條件下,通過聯合優化V2I基站發送預編碼矩陣、IRS 反射相移矩陣,給出了MIMO 車聯網V2I 用戶信道容量最大化問題。該問題是一個多變量耦合的非凸優化問題,難以直接求解。
2) 針對上述非凸優化問題,提出了一種交替迭代優化算法。首先,采用最小均方誤差(MMSE,minimum mean square error)規則把非凸目標函數轉換為等價的易處理函數;其次,針對發送預編碼矩陣的優化問題,利用矩陣分析理論把隱式的不等式約束條件轉換為顯式的凸約束條件,再把矩陣跡運算進行向量化表示,得到可以直接用優化工具CVX求解的形式;再次,針對IRS 反射相移矩陣的優化問題,利用內逼算法、懲罰因子,將非凸約束轉換為互補松弛問題求解,避免了使用較高復雜度的半定規劃和高斯隨機化求解方法;最后,提出了求解發送預編碼和IRS 反射相移矩陣的交替迭代優化算法。
3) 對V2I 和V2V 用戶共存下的基于IRS 輔助的MIMO 車聯網通信性能進行了仿真。仿真結果驗證了所提算法的收斂性和優越性,證明了基于IRS輔助的MIMO車聯網V2I用戶在該算法下信道容量的顯著提升,給出了IRS 最佳部署位置和平均車速對V2I 用戶信道容量的影響。
1 系統模型
典型的車聯網場景包含V2I 和V2V 兩類用戶。V2I 主要服務數據傳輸速度較高的通信需求,此類車輛通信終端被稱為基于蜂窩的車輛用戶設備(C-VUE,cell-vehicle user equipment);V2V 主要是車輛終端直接通信,主要服務低時延性安全類信息,此類車輛通信終端被稱為D2D 車輛用戶設備(D-VUE,D2D vehicle user equipment)[31-32]。考慮IRS 輔助的下行鏈路MIMO 車聯網場景如圖1 所示,IRS 部署在路邊輔助車聯網通信,假設只考慮車聯網蜂窩基站(或路側單元設施)通信覆蓋范圍內的無線傳輸問題,覆蓋范圍內包含一個C-VUE和一對D-VUE(D-VUE1為發送端,D-VUE2為接收端)。收發兩端都是多天線,基站和C-VUE 天線數分別為Mt和Mr,D-VUE 的發送端和接收端天線數分別為Lt和Lr,IRS 上的反射單元數為N。
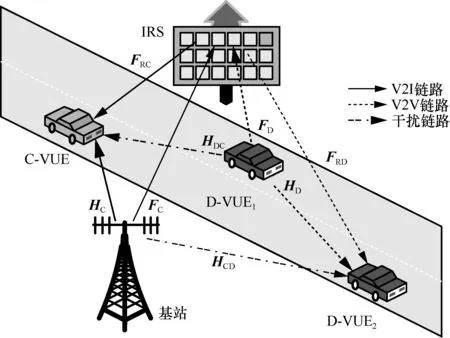
圖1 IRS 輔助的下行鏈路MIMO 車聯網場景
1.1 信道描述
該系統中,作為V2I 用戶,基站發送信號給C-VUE;作為V2V 用戶,D-VUE1車輛發送信號給D-VUE2。由于IRS 的輔助和波束控制,基站和D-VUE1的下行信號會經過IRS 分別反射給C-VUE和D-VUE2。因此,C-VUE 和D-VUE2的目標接收信號均是直達徑和經過IRS 的反射徑上的兩路信號的疊加。由于V2I 用戶和V2V 用戶共用頻譜,C-VUE 會受到來自D-VUE1的干擾,同樣,D-VUE2會受到來自蜂窩基站的干擾。如圖1 所示,基站與IRS、D-VUE1與IRS、IRS 與C-VUE、IRS 與D-VUE2之間的信道分別記為;基站與C-VUE、D-VUE1與D-VUE2、基站與D-VUE2、D-VUE1與C-VUE之間的信道分別記為。
IRS 通過調整反射單元相位(幅度為1)來最大化用戶入射信號,IRS 的反射相移矩陣表示為表示第n個反射單元,其相移為θn∈ [0,2π],n= 1,2,…,N。由于IRS具有波束定向可控能力,可假設基站與IRS、IRS與車輛終端之間的通信信道為萊斯信道,其余信道為瑞利信道[33]。萊斯信道可表示為
其中,d為陣列元素間距離,λ為電磁波波長,φ為單個陣列元素/天線對應的波束到達角(AoA,angle of arrival)或離去角(AoD,angle of departure)。基于此,視線線路可表示為
1.2 容量分析
2 波束成形設計
本文要在滿足V2V 用戶數據速率需求、V2I基站發射功率受限以及IRS 反射相移模約束條件下,以最大化V2I 用戶信道容量為目標,聯合優化C-VUE 發送端的發送預編碼矩陣W和IRS 的反射相移矩陣Φ,得到基站和IRS 端主被動聯合波束成形設計方法。本節將給出優化問題模型、子凸問題求解方法以及得到原問題解的交替迭代優化算法。
2.1 問題建模與等價轉換
V2I 用戶數據速率最大化問題可以表述為
其中,式(11a)為優化目標;式(11b)為V2V 用戶數據速率約束,γreq為最小數據速率需求;式(11c)為基站發射功率約束,P為基站可用的發射總功率;式(11d)為IRS 反射相移模1 約束。
P2 的優化變量是相互耦合的,可采用交替迭代優化算法[16-20],根據MMSE 規則,只要優化變量W和Φ的每次迭代值給出,即可解耦UC、UD、VC和VD。所以只需交替優化W和Φ。下面給出具體的交替優化W和Φ的方法。
2.2 優化W
固定Φ、UC、UD、VC和VD,則求解W的優化問題可轉換為
把EC代入式(20a),通過矩陣跡的等價操作只保留含有優化變量W的項,則P3 的目標函數可等價為
把ED代入式(20b),并把不含有優化變量W的項移到不等式右邊,則約束條件式(20b)可等價為
把式(20a)和式(20b)分別用式(21)和式(22)代替,則P3 可等價為
P4 為凸優化問題,但由于矩陣跡運算的存在,并不能直接用CVX 來求解。為了方便使用CVX,矩陣的跡運算可以利用式(24)和式(25)轉換為向量之間的運算。
目標函數f(W)中的第二項、第三項可以直接利用恒等式(24)進行轉換,第一項可以先使用式(24),再利用式(25)進行轉換,可得
同理可得到約束條件式(23b)左邊矩陣跡運算的向量化轉換。令向量,則P4可以等價轉換為
P5 可以直接使用CVX 求解,最后把求解出的w重組為矩陣W即得到P3 的解。
2.3 優化Φ
固定W、UC、UD、VC和VD,則求解Φ的優化問題可轉換為
優化變量Φ隱含在目標函數和約束條件表達式的信道矩陣中。
再觀察約束條件式(28b),其不等號左邊的形式與目標函數相似,把ED代入式(28b),可利用處理目標函數的方法對式(28b)進行轉換,這里不再贅述,最終可把 Tr(VDED)轉換為
用式(34)、式(35)分別替換式(28a)、式(28b),去掉目標函數中的常數項,則P6 可等價轉換為
由于矩陣B、C、和都是非負半定矩陣,Ω和也是非負半定矩陣。P8 非凸只是因為約束條件式(37c)的非凸性。該問題可轉換為半定規劃,再用高斯隨機化求解,但該方法復雜度高。
本文使用內逼算法進行求解,降低計算復雜度。內逼算法的原理是在每次迭代中找到所求函數的上界來逐步逼近最優值。以函數f(x)為例,定義其在第t+1次迭代時的上界為,該上界的確定需要滿足如下3 個條件[20,26,38]。
因此,當μ> 0時,可用二分法找到最優的μ*。把μ*代入式(42)即得P9 的最優解ϕ*,進而得到P6的最優解Φ*。
2.4 交替迭代優化算法

算法1交替迭代優化算法

求解
3 仿真結果與分析
本節通過仿真分析評估所提方案的性能。仿真場景如圖2 所示,車輛同向行駛,分布在一段長200 m、寬12 m 的三車道道路區間內,平均車速v=70 km/h,C-VUE 車輛和一對D-VUE 車輛按均值為2.5v的指數分布隨機生成,車載終端天線高度1.5 m。基站和IRS 部署在道路兩側,高度均為25 m,以道路一側的中間點為坐標原點,基站和IRS 的坐標分別為(0,0,25)和(0,12,25)[32]。其他仿真參數設置如無特殊說明如表1 所示。
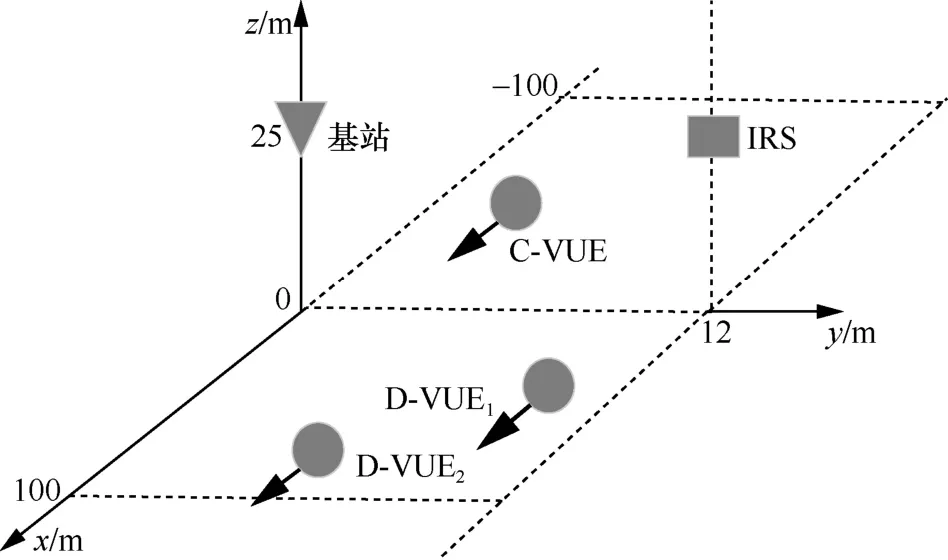
圖2 仿真場景
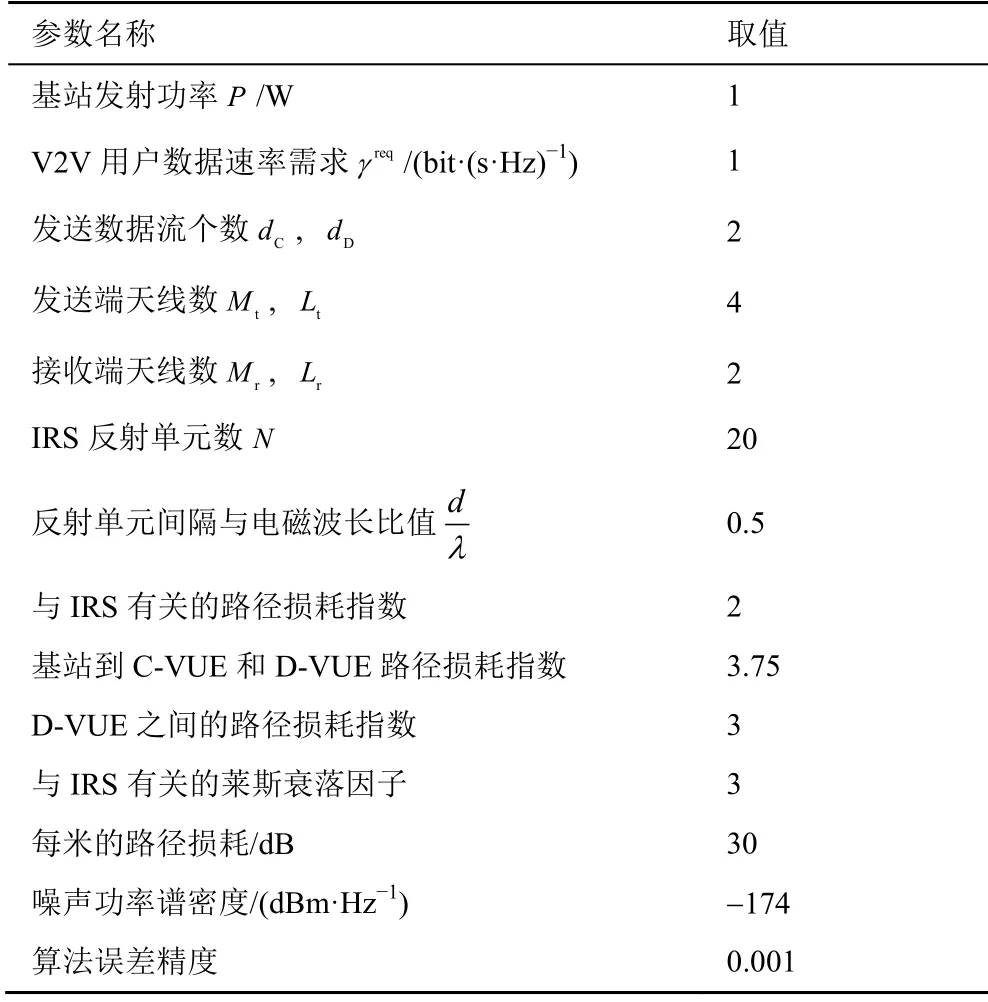
表1 仿真參數設置
V2I 用戶的信道容量隨交替迭代優化算法迭代次數的變化如圖3 所示。IRS 反射相移模個數越少算法收斂速度越快,當N=20 時,算法迭代10 次就能收斂到穩定值。實際工程中如果對收斂速度要求較高,可以適當犧牲精度來使用較少的迭代次數,例如,與初始值相比,迭代10 次時N=20、60和100 對應的信道容量分別提高了4.2 dB、3.0 dB和2.4 dB,性能提升比較明顯。
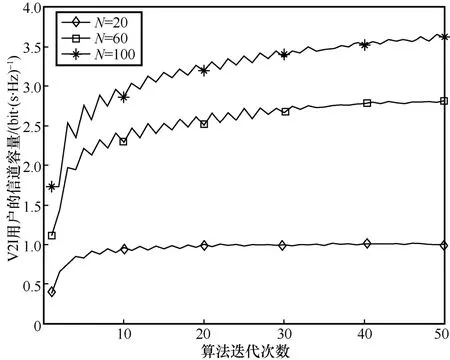
圖3 信道容量隨交替迭代優化算法迭代次數的變化
本文對所提算法與3種基準算法在不同IRS反射單元數下進行了比較,證明了所提算法的優越性。不同算法的信道容量與IRS 反射單元數的關系如圖4所示。3 種基準算法如下:1) 信道匹配算法,即基站的發送預編碼矩陣采用理想形式,利用信道增益矩陣的奇異值分解設計,IRS 相移矩陣采用本文方法設計;2) 無IRS 輔助算法,即系統中不部署IRS;3) IRS相移隨機算法,即發送預編碼的求解利用本文算法,但IRS 的相移矩陣是隨機生成的。從圖4 可以看出,隨著IRS 反射單元數的增加,所提算法V2I 用戶的信道容量逐漸提升,且與其他3 種算法相比性能增益更加明顯。無IRS 輔助算法和IRS 相移隨機算法的信道容量幾乎相同,說明了部署IRS 若不進行波束優化則無法帶來性能增益。當IRS 反射單元數為20 時,所提算法與其他算法相比信道容量增益可達3.5 dB。
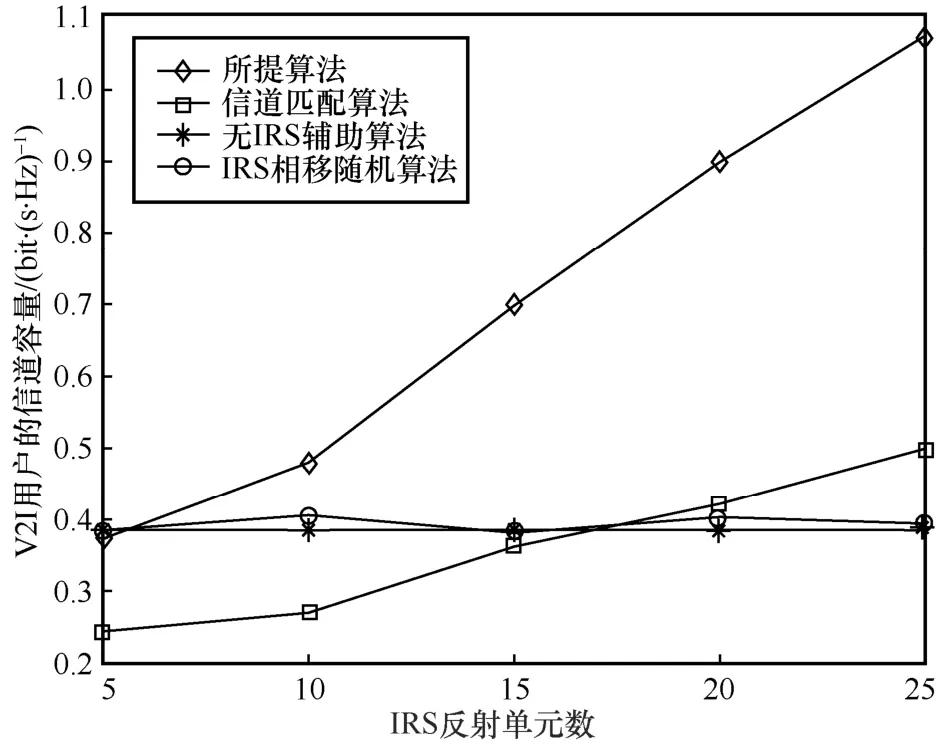
圖4 不同算法的信道容量與IRS 反射單元數的關系
V2I 用戶的信道容量與IRS 位置的關系如圖5所示。仿真中固定了IRS 的y軸和z軸坐標,只改變x軸坐標,使IRS 從-100 m 到100 m 進行移動。結果表明,無論V2I 用戶行駛到基站左側還是右側,IRS 越靠近基站信道容量越大。這對工程上IRS 部署位置的選取提供了參考。
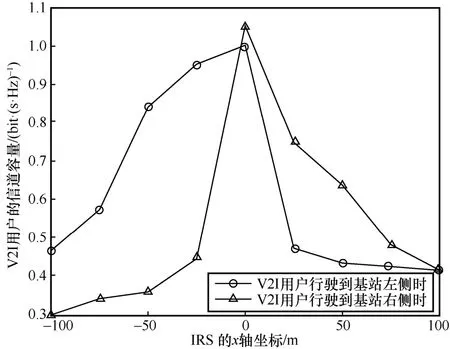
圖5 信道容量與IRS 位置的關系
不同的干擾路徑損耗指數下V2I 用戶的信道容量與車速的關系如圖6 所示。其中,αDC為D-VUE對C-VUE 的干擾路徑損耗指數。αDC越大,則V2I用戶的信道容量越高,這是因為D-VUE 對C-VUE的干擾變弱。隨著平均車速的增加,V2I 用戶的信道容量呈現先增加后減少的趨勢,這種現象由以下2 個因素導致:1) D-VUE 和C-VUE 的干擾路徑距離;2) D-VUE 的發射功率。當車速增大,車輛間平均距離增大時,D-VUE 和C-VUE 之間的干擾距離增加,使C-VUE 的接收干擾減少,C-VUE 信道容量增大;但當車速增大到一定程度,D-VUE 收發端距離增大到影響其最小速率需求的實現時,為了滿足速率需求,D-VUE 發送端需要增加發射功率,這樣則對C-VUE的干擾增加;當增加發射功率產生的干擾超過增加距離減少的干擾時,V2I 用戶的信道容量開始減少。
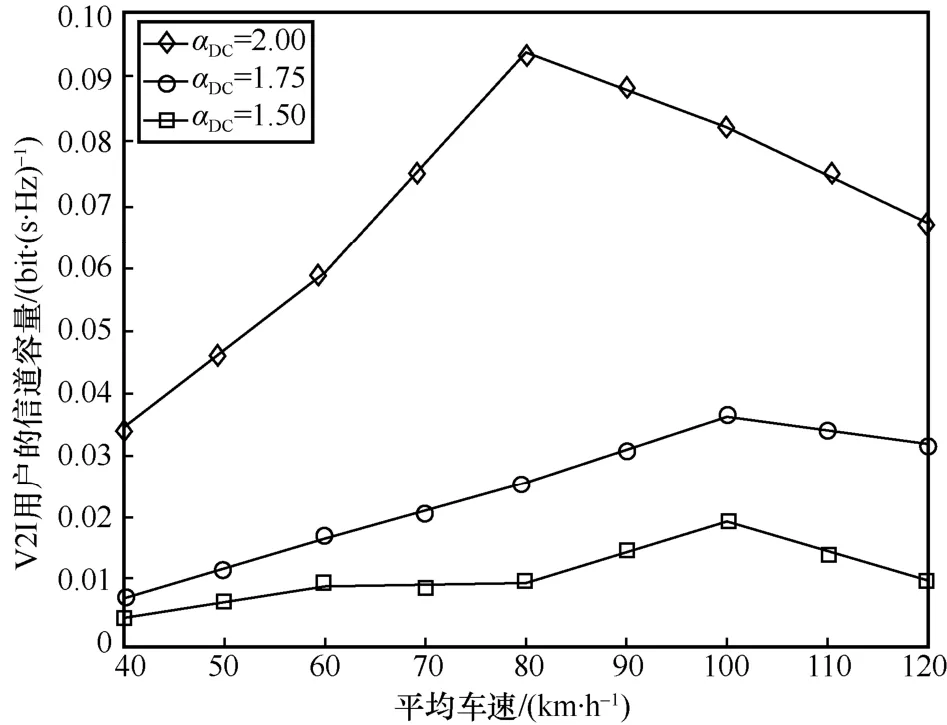
圖6 信道容量與車速的關系
4 結束語
基于IRS 輔助車聯網通信能夠提升覆蓋強度和增強反射信號的特點,針對IRS 輔助的MIMO車聯網系統,本文提出了一種V2I 和V2V 共存下的聯合波束成形設計方案。在滿足V2V 用戶數據速率需求、V2I 基站發射功率受限以及IRS 反射相移模約束等條件下,通過最大化V2I 用戶的信道容量,給出了最優的基站發送預編碼矩陣和IRS反射相移矩陣。利用MMSE 規則證明了非凸的速率函數可以等價凸化,使用矩陣分析和內逼算法對隱式非凸約束進行轉換,提出了一種交替迭代優化算法。仿真結果表明:1) 所提算法具有較快的收斂速度;2) 所提算法明顯優于無IRS 的情形,且隨著IRS 反射單元數的增加性能提升更加顯著;3) 在車聯網中,IRS 最適宜部署在基站附近,且V2I 用戶信道容量在適當平均車速下才能取得最大值。