(1.哈爾濱工程大學信息與通信工程學院,黑龍江 哈爾濱 150001;2.哈爾濱工程大學智能科學與工程學院,黑龍江 哈爾濱 150001)
0 引言
近年來,頻控陣(FDA,frequency diverse array)雷達作為新體制雷達憑借其獨特的性能優勢得到了國內外研究人員的關注[1-2]。頻控陣雷達是在相控陣雷達的基礎上,通過在相鄰陣元發射的信號中引入微小頻偏,使方向圖具有角度和距離的雙重依賴性,可以形成二維空間譜對目標進行定位,且在相同帶寬的條件下,可以獲得比相控陣雷達更強的距離分辨力和抗干擾能力。頻控陣雷達可以與多輸入多輸出(MIMO,multiple-input multiple-output)技術結合[3],實現角度維和距離維的解耦合,并提高自由度以定位多個目標。關于頻控陣MIMO 雷達的研究已全方位展開。對于目標檢測問題,文獻[4]研究了一種廣義似然比自適應檢測方法,將對單個目標的檢測問題將轉化為半正定規劃問題,并用譜峰搜索和牛頓迭代法求解。對于方位參數估計問題,文獻[5]提出了一種對低仰角目標的角度和距離進行估計實現定位的方法;文獻[6]提出了一種近似極大似然(ML,maximum likelihood)方法,用在單快拍條件下對目標進行定位。為了得到參數估計精度的理論極限,文獻[7]推導了角度、距離與速度估計的理論誤差,得到了克拉美羅界(CRB,Cramér-Rao bound)。對于空間中多個目標的多個參數同時估計,現有研究集中于多維參數估計及其快速實現方法,如文獻[8]提出了一種基于迭代插值傅里葉系數法進行定位的方法,文獻[9]提出了用降維與解耦的方法進行發射角、接收角和距離的聯合估計,但這些方法局限于多維估計的框架內,當目標數較多時由于估計維度的增加而難以準確求解。
更關鍵的問題是,已有的基于頻控陣MIMO雷達的參數估計方法均需要目標(信源)數作為先驗信息,當不知道準確的目標數時,參數估計方法也會惡化甚至失效。傳統的雷達信號處理方法將目標數估計與參數估計作為2 個分離的步驟,即先得到目標數的估計值,再將其代入后續的參數估計器中完成定位等任務。現有的目標數估計方法中,最具代表性且應用最廣泛的方法是以Akaike 信息論準則(AIC,Akaike’s information criterion)和最小描述長度(MDL,minimum description length)準則為代表的估計準則,這類方法通過最小化假設模型和觀測數據之間的Kullback-Leibler 距離確定目標數[10]。而參數估計方法則可以根據是否需要數據協方差矩陣的結構信息,分為非參數化估計方法和參數化估計方法。非參數化估計主要包括波束成形法和最小方差無畸變響應(MVDR,minimum variance distortionless response)波束成形法,可以直接利用協方差矩陣得到空間譜。其他大部分估計方法如多重信號分類(MUSIC)法和極大似然法則需要根據目標數重構信號,然后進行分解或擬合才能得到估計的結果。
在分離式的目標數與參數估計方法中,由于離散的目標數估計與連續的多維參數估計是級聯關系,若目標數估計發生錯誤,不僅會造成漏警或虛警,而且會影響后續的參數估計性能。多年的研究已證明,目標數估計方法的發展滯后于參數估計方法,目標數估計方法的落后已經影響到高精度參數估計方法的實際應用效果。有學者嘗試將目標數估計與參數估計聯合處理以降低系統復雜度并更加充分地利用信號信息。文獻[11]將目標數估計轉化為多個子優化問題,但要求將雷達分布放置以實現空間分集;文獻[12]利用噪聲子空間的代數結構估計多個目標,但只適用于點源的估計。文獻[13-15]研究了檢測前跟蹤方法,這類方法不需要設定檢測門限,但仍需要用譜峰搜索等方法求解才能得到估計結果,效率低且存在量化誤差,且上述方法僅適用于相控陣雷達的目標數或波達方向參數的估計。
本文在現有的頻控陣MIMO 雷達研究的基礎上,針對現有目標數估計方法在低信噪比情況下準確率較低、高精度定位算法計算復雜度過高的問題,對目標數和方位參數的聯合估計問題進行數學建模,提出了一種頻控陣MIMO 雷達的目標數和方位聯合估計方法。將目標數和方向與距離參數聯合估計轉化為對空間譜譜峰個數的檢測和對譜峰位置定位的二維多峰優化問題,降低了搜索維度并設計了基于密度的多峰差分進化算法對多峰問題快速準確求解,相比于譜峰搜索或多維優化類參數估計方法顯著降低了計算量,實現了目標數與方位聯合估計,即利用空域信息在估計目標數的同時得到方位參數估計結果。
1 頻控陣MIMO 雷達的數學模型
假設收發共址的頻控陣MIMO 雷達由M個發射陣元和N個接收陣元組成的陣列構成,陣元間距均為d,相鄰的發射陣元的工作頻率之間存在線性增量Δf,第m個陣元發射信號的工作頻率為fm=fc+(m-1)Δf,fc為載波頻率,滿足 Δf≪fc。設第一個發射陣元和接收陣元為參考陣元,陣元部署示意如圖1 所示。
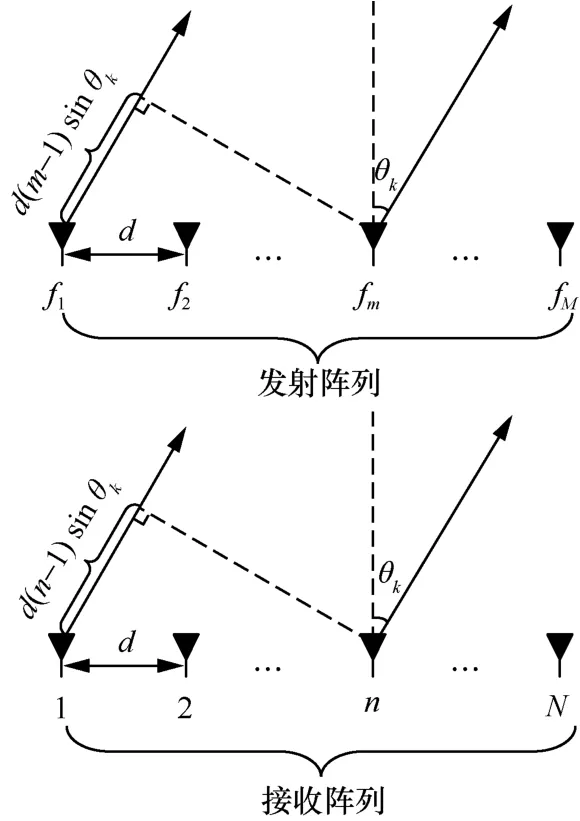
圖1 陣元部署示意
在t時刻,第m個陣元發射的歸一化信號幅度為x m(t),各個陣元發射的信號波形在每個脈沖持續時間Tp內相互正交,即滿足
其中,υ為時延,*為共軛運算。發射信號經目標反射,產生衰落、相移并與加性噪聲疊加后得到接收信號。假設空間中存在K個目標,其中第k個目標相對于陣列法線方向的角度為θk,相對于發射和接收參考陣元的距離均為rk,則第m個發射信號經過第k個目標反射后到達第n個陣元的雙程傳播時延為
其中,c為電磁波傳播速度。則在窄帶假設下,第n個陣元接收到的反射信號由各回波信號疊加得到,即
其中,ξk為第k個目標反射后回波信號的復系數,包含了目標的反射系數、路徑損耗和多普勒頻移。將時延和工作頻率代入式(3),得到相位項的具體形式為
再將每個陣元接收到的數據通過M個匹配濾波器和混頻器,其中,第l個匹配濾波器的脈沖響應與第m個發射波形對應,表示為,l= 1,2,…,M。第n個陣元經過第l個匹配濾波器的輸出為
匹配濾波的推導過程如附錄1 所示。由匹配濾波器與發射信號的對應關系,將第l個濾波器的輸出通過混頻器,即乘以,并將結果標記為,具體形式為
雷達接收機的信號處理示意如圖2 所示。
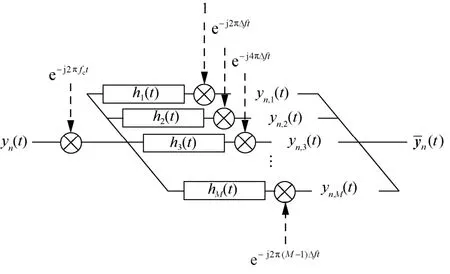
圖2 雷達接收機的信號處理示意
2 聯合的目標數與方位參數估計方法
2.1 聯合估計方法
對于本文所研究的頻控陣MIMO 雷達,當空間中目標數未知時,可以利用非參數化方法,僅用單個角度和距離組成的導向矢量γ(θ,r)重構接收信號,得到 MVDR 算法的二維空間譜函數為。當存在5 個目標時,頻控陣MIMO 雷達的MVDR 空間譜示意如圖3所示。采用譜峰搜索法求解時,需要對連續的解空間進行等間隔離散化采樣,相鄰采樣點的距離被稱為掃描間隔。由于非采樣點上的方位也需要被采樣點上的數值近似表示,故真實方位與譜峰所在采樣點的距離稱為量化誤差。連續空間被有限個離散數值表示的過程決定了譜峰搜索的量化誤差無法消除,且掃描間隔越小計算量越大。為了同時得到目標數與方位參數的準確估計值,本文設計了基于密度的多峰差分進化(DBMDE,density-based multimodal differential evolution)算法對空間譜函數這個二維多峰優化問題進行求解。理想情況下,空間譜的每個峰對應一個目標,得到的有效譜峰個數即目標數估計值,譜峰的位置經線性映射即參數估計值。由此可以實現對多個目標的聯合目標數估計與方位估計,既規避了繁重的多維搜索,也不存在量化誤差。
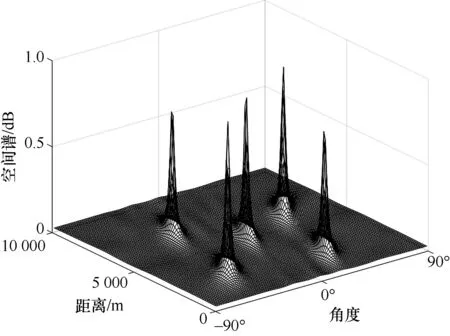
圖3 當存在5 個目標時,頻控陣MIMO 雷達的MVDR 空間譜示意
2.2 基于密度的多峰差分進化算法
差分進化算法是一類智能優化算法,算法中個體的分布和進化方向取決于個體間的差異。經典的差分進化算法是一種多維優化算法,只能找到單個的全局最優值,但具有優異的尋優性能,因此差分進化算法也被改進用于解決多峰優化問題。已有的各種多峰差分進化算法及變體形式均需要峰的個數作為先驗信息[16],而本文設計的基于密度的多峰差分進化算法可以在峰個數未知的條件下,在迭代過程中利用密度聚類方法檢測峰的個數(即根據種群中個體的密集程度檢測出高密度區域),并利用改進的差分進化策略進行多峰尋優搜索確定峰的準確位置。
2.2.1 基于密度聚類確定峰的個數
設種群由P個二維個體組成,每一維分別對應目標的角度和距離,算法的最大迭代次數為G。在初代,每個個體的每一維都被初始化為[0,1] 的均勻隨機數。
基于密度的聚類方法通過衡量個體之間的緊密程度來判斷個體之間的可連接性,本文所提方法將基于密度的噪聲點空間聚類(DBSCAN)算法[17]引入迭代尋優的過程中,利用當前種群中的個體分布的密度關系對其進行聚類,使處于同一個峰附近的個體共同演進。個體間的密度關系由2個鄰域參數確定,分別是半徑參數ε(形成密度直達關系所需的最大距離)和數量參數κ(形成密集區域所需的最小個體數),其中,ε隨迭代次數的增加而衰減,以逐漸分辨位置相近的峰(形成新的密集區域)。由此,在算法的第g次迭代中將得到Qg個密集區域樣本的集合(稱為簇),并將種群中不屬于任何簇的個體作為噪聲點丟棄。聚類后第q個簇中含有的個體數為P g(q),第q個簇中適應度最大的個體為最優個體,q= 1,2,…,Qg。
2.2.2 利用改進的差分進化策略進行多峰尋優
本文設計了改進的多峰差分進化策略,由變異和交叉兩步組成。在變異步驟中,第q個子種群中第p個變異個體的生成式為
最后,將全部子種群合并,生成下一代種群。隨著迭代次數的增加,每個子種群中的個體向峰值點靠攏,Qg也將趨于穩定。當聚類得到的簇個數Qg連續代不發生變化,則判定算法已經找到全部的峰,不再執行DBSCAN 算法以節省計算量,每個子種群按照當前的聚類結果繼續尋優搜索直到達到最大迭代次數。
2.2.3 異常個體篩選
由于噪聲的存在和搜索邊界的限制,算法定位到的峰不一定都是有效的,需要將有效峰和偽峰進行區分。計算每個子種群中的峰值即最優個體的適應度值,并按由大到小的順序重新排列為,若相鄰適應度之比小于判決門限η,即,則保留全部的峰為有效峰;否則判定存在偽峰。根據原型聚類的原理,使有效峰與偽峰對應的峰值及其均值的平方誤差和最小,找到有效峰與偽峰的劃分點,即有效峰的個數為
目標數與方位參數聯合估計的步驟如下。
步驟1發射正交信號,并對接收信號進行匹配濾波和混頻處理。
步驟2對輸出信號進行采樣,計算得到協方差矩陣。
步驟3利用DBMDE 算法,同時得到有效峰的個數及其位置,DBMDE 算法流程如圖 4所示。
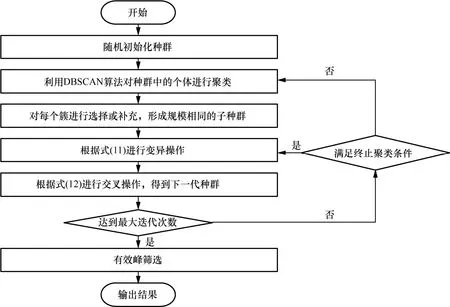
圖4 DBMDE 算法流程
步驟4進行映射并輸出結果,同時得到目標數與方位參數的聯合估計結果。
3 實驗分析
本節通過數據仿真進行實驗分析,頻控陣MIMO 雷達和DBMDE 算法的仿真參數如表1 和表2 所示。考慮存在3~5 個目標的情況,分別對目標數估計與方位參數估計的性能進行比較和分析。當存在 3 個目標時,中心角度分別為{- 4 0°,5°,45°},中心距離分別為{3 km,7 km,4 km} ;當存在 4 個目標時,中心角度分別為{-4 0°,-10°,20°,40°},中心距離分別為{5 km,2 km,8 km,4 km} ;當存在5 個目標時,中心角度分別為{- 4 5°,-30°,5°,30°,50°},中心距離分別為{2 .5 km,7 km,5 km,2 km,6 km} 。每次獨立實驗中,遠場目標的方位參數為中心角度疊加(-1 0°,10° )的均勻隨機數和中心距離疊加(-1000,1000)的均勻隨機數。若無特殊說明,每個目標回波的系數ξk為(0,2)的均勻隨機數。
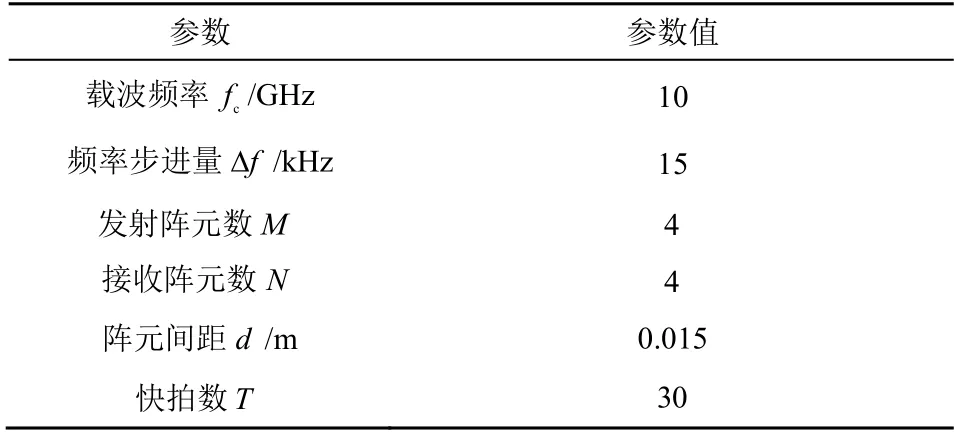
表1 頻控陣MIMO 雷達的仿真參數
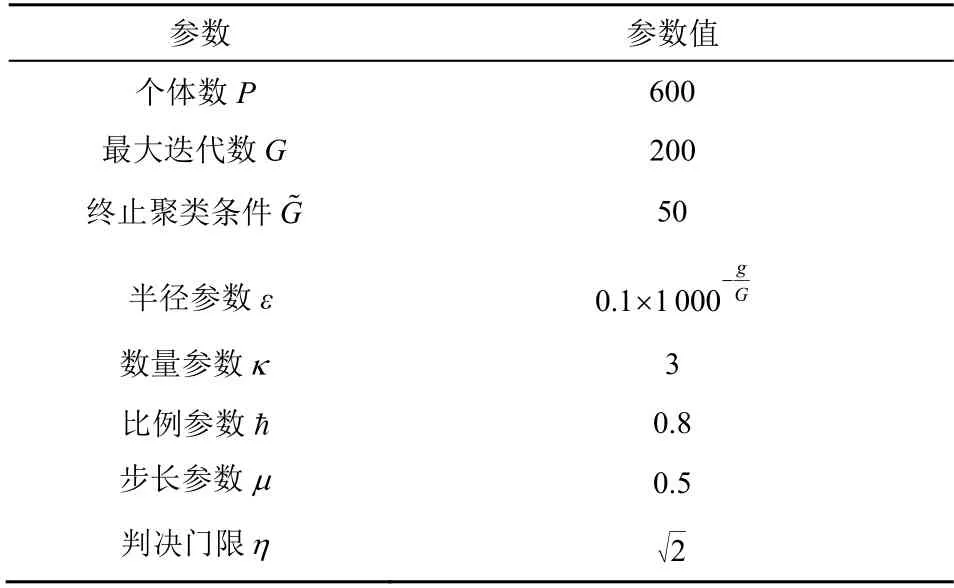
表2 DBMDE 算法的仿真參數
3.1 目標數估計性能分析
本節實驗用估計目標數的成功概率分析所提DBMDE 算法的性能,對比算法包括AIC、MDL、EDC(efficient detection criteria)和SORTE(second order statistic of the eigenvalues)檢測算法[18]。若估計得到的目標數與實際目標數相等,則判定為估計成功,Monte Carlo 仿真次數為1 000 次。假設4 個目標具有相同的回波系數且忽略起伏效應,得到的估計成功概率與信噪比(SNR,signal-to-noise ratio)關系如圖5 所示。而實際情況中,每個目標的反射面積往往是不相等的,若每個目標回波系數取值為(0,2)的均勻隨機數,其他條件不變,得到的仿真結果如圖6 所示。當圖5 中SNR<-8 dB 和圖6 中SNR<-10 dB 時,DBMDE 算法的目標數估計性能與AIC 算法互有優劣;但在更高信噪比條件下,由于AIC 算法不是一致估計,趨于過估計目標數[10],DBMDE 算法估計成功概率則趨于1。相比于僅依據特征值大小得到目標數估計結果的傳統算法,DBMDE 算法取得性能優勢的原因在于對目標空域信息的利用。

圖5 目標回波系數相同時目標數估計成功概率與信噪比關系
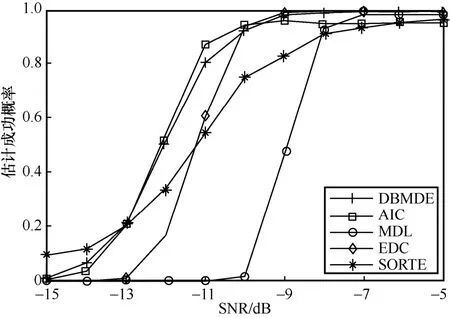
圖6 目標回波系數不同時目標數估計成功概率與信噪比關系
當存在3 個目標且SNR=-10 dB 時,得到的估計成功概率與快拍數關系如圖7 所示。在低信噪比和小快拍的惡劣條件下,信號子空間被污染,基于特征分解的目標數估計方法難以找到準確的結果,而DBMDE 算法具有更高的估計成功概率,說明其在復雜環境下具有通用性。值得注意的是,雖然這里只展示了所提算法的目標數估計性能,但實際上方位參數的估計也同步完成了。

圖7 目標數估計成功概率與快拍數關系
3.2 方位參數估計性能分析
本節將所提DBMDE 算法與其他算法的角度和距離估計的均方根誤差及成功概率進行對比。對比算法包括基于旋轉不變技術(ESPRIT)[19]、MUSIC、經典波束成形(CBF,classical beam forming)和基于多維差分進化算法求解ML 的算法,CRB 被用于展示理論估計性能,推導過程如附錄 2 所示,Monte Carlo 仿真次數均為100 次。
經典的多維差分進化算法被直接用來求解極大似然方程時,根據文獻[20]設置參數如下:個體數為60,最大迭代次數為1 200 次,差分權重取值范圍為[0.5,1],交叉概率為0.9。MUSIC 與CBF 算法的掃描間隔為1°和100 m。ESPRIT 算法中角度估計值直接由旋轉不變性求解。
首先,考慮存在4 個目標的情況并假設目標數已經被正確估計,得到的角度和距離估計均方根誤差和信噪比關系分別如圖8 和圖9 所示。隨信噪比增大,DBMDE 算法漸近地趨向于CRB,而基于譜峰搜索求解MUSIC 與CBF 的算法和基于多維差分進化算法求解ML 的算法估計精度低于DBMDE 算法。
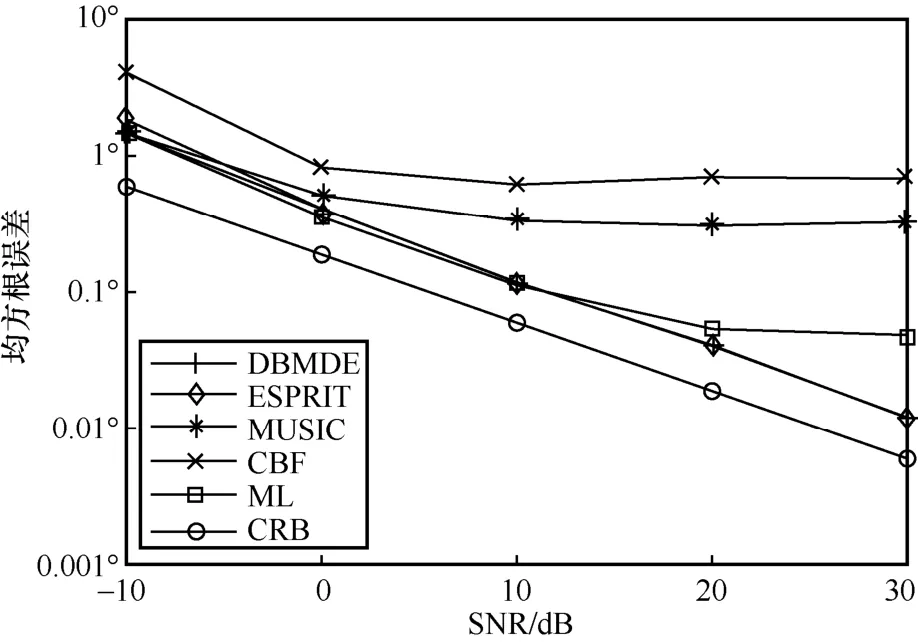
圖8 角度估計的均方根誤差與信噪比關系
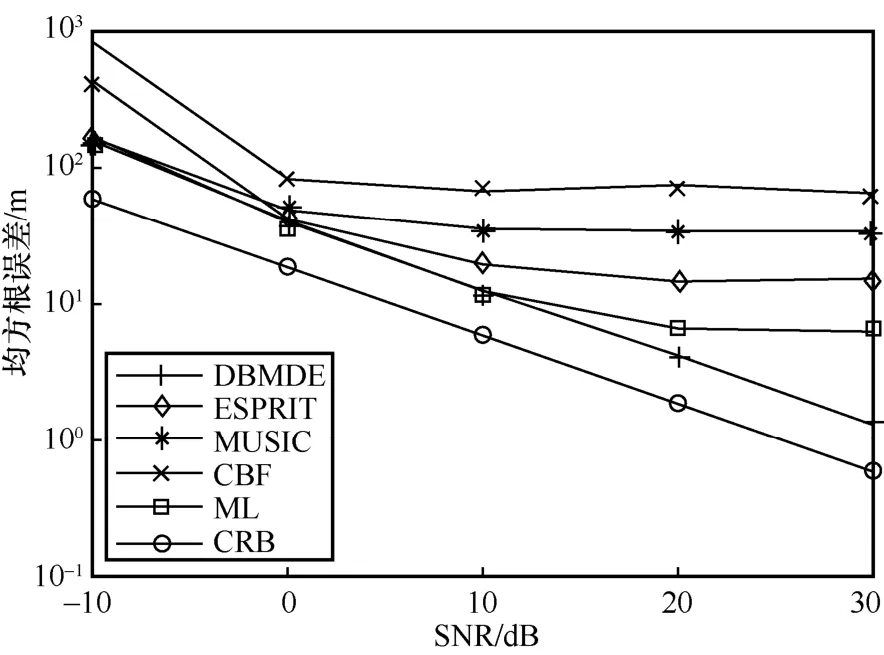
圖9 距離估計的均方根誤差與信噪比關系
考慮存在5 個目標的情況,規定角度估計誤差小于1°且距離估計誤差小于100 m 為估計成功,得到的估計成功概率與信噪比關系如圖10 所示。從圖10 可以看出,CBF 算法由于分辨力不足無法準確區分位置相近的目標。基于多維差分進化算法求解ML 的算法雖然不存在譜峰搜索所面臨的精度與計算量的矛盾,但搜索空間的大小隨目標數的增加呈指數級擴張。當存在K個目標時,每次適應度計算的復雜度為O(M3N3),搜索空間為2K維。對于5 個目標時所要求解的10 維優化問題,基于多維差分進化算法求解ML 的算法難以收斂至全局最優,估計成功概率最低。而所提DBMDE 算法通過降維處理,在空間譜上進行多峰優化求解,每次適應度計算的復雜度為O(M2N2K),且搜索空間僅為2維,在計算量上具有明顯的優勢。
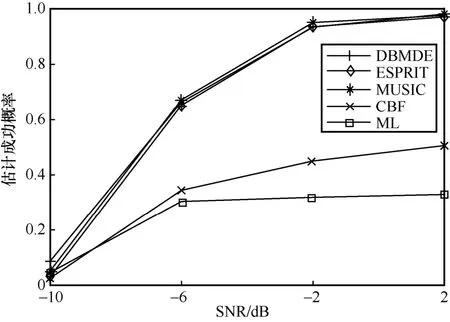
圖10 估計成功概率與信噪比關系
3.3 DBMDE 算法參數分析
本節分析了DBMDE 算法中可調參數與目標數和方位參數估計性能的關系。選取對算法性能影響較大的半徑參數ε和步長參數μ進行敏感性分析。ε在算法中既作為聚類半徑,又在式(10)和式(11)中與μ共同用于生成新個體。由于無法對每一種參數設置方法排列組合分析,因此選取了3 種典型的取值方法,仿真存在5 個目標時目標數被正確估計的比例;角度估計精度達到0.1°、0.01°和0.001°的比例;距離估計精度達到10 m、1 m 和0.1 m 的比例。為了盡量排除噪聲的影響,設置快拍數為100,信噪比為30 dB,DBMDE 算法參數敏感性分析結果如表3 所示。

表3 DBMDE 算法參數敏感性分析結果
對比表 3 數據可以看出,當半徑參數ε=、步長參數μ=0.5 時,DBMDE 算法取得了最優的結果。
仿真實驗的結果表明,所提DBMDE 算法具有較少的計算量和較強的穩健性,方位參數估計的均方根誤差最接近克拉美羅界,實現了聯合估計并克服了其他估計算法需要目標數作為先驗信息的缺陷。
4 結束語
傳統的陣列信號參數估計方法的思路是先進行目標數估計,然后將目標數估計結果代入參數估計器,在多維空間搜索得到全局最優解。本文利用降維處理的思想,將基于頻控陣MIMO 雷達的方位參數估計問題由多維的參數優化問題轉化為低維的多峰優化問題。通過設計DBMDE 算法進行求解,收斂速度更快,且估計結果更接近克拉美羅界。而且所提算法可以同時得到目標數的估計值,適用于需要對多個潛在目標進行探測和定位的場合,為陣列信號的檢測與估計研究提供了新方法。所提DBMDE 算法可擴展應用到其他復雜的測向問題,如分布源的MIMO 雷達參數估計或極化敏感陣列的信源和方向聯合估計,也可用于其他多峰優化問題的求解。下一步的研究重點是設計沖擊噪聲和雜波背景下的目標數與方位參數的高精度聯合估計方法。
附錄1 匹配濾波推導過程
由此得到雷達接收機中匹配濾波器的輸出結果。
附錄2 理論估計性能分析
定義Q=σ2I為噪聲協方差矩陣,根據Slepian-Bangs公式,Fisher 信息陣F可以表示為
將Fisher 信息陣及其逆陣分別進行分塊表示為
再由分塊矩陣求逆公式可得F-1左上部分G11的展開形式為
由矩陣求逆公式得到角度估計和距離估計的克拉美羅界表達式為
由此得到頻控陣MIMO 雷達方位參數估計的克拉美羅界。