ļSų°═©ą┼Īóå╬Ų¼ÖC╠Ä└Ē─▄┴”ęį╝░Ė„ĘNęĢŅl╠Ä└Ē╝╝ągĄ─╠ßĖ▀Ż¼ęĢŅl▒O┐žŽĄĮy░lš╣Ą─įĮüĒįĮ┐ņŻ¼ŲõųąęĢŅlé„▌ö▓╔ė├ėąŠĆĘĮ╩ĮŠ▀ėąé„▌öĘĆČ©Ż¼«ŗ├µŪÕ╬·Ą╚╠ž³cĪŻĄ½╩ŪŻ¼ė╔ė┌▀@ĘNĘĮ╩Į│╔▒ŠĖ▀ĪóŠSūo▓╗ĘĮ▒ŃŻ¼Ūęį┌ėąą®╠ž╩ŌĄ─ģ^ė“╩▄Śl╝■╦∙Ž▐Ż¼▓╝ŠĆ└¦ļy╔§ų┴¤oĘ©▓╝ŠĆŻ¼Ųõ╩╣ė├ĘČć·╩▄ĄĮ║▄┤¾Ž▐ųŲĪŻČ°¤oŠĆé„▌ö╝╝ągę“Š▀ėą╩╣ė├ņ`╗ŅĪóöyĦĘĮ▒ŃĪó┐╔ęŲäėĪóĄ═│╔▒ŠĄ╚ā׳cŻ¼į┌ęĢŅl▒O┐žĪóé„▌öŻ¼Šo╝▒¼Fł÷Š╚į«║═▄Ŗ╩┬═©ą┼Ą╚ŅIė“░lō]ų°Š▐┤¾Ą─ū„ė├ĪŻ
╬─ųą╗∙ė┌CC1100¤oŠĆé„▌ö─ŻēK║═PTC08┤«┐┌özŽ±Ņ^─ŻēKįOėŗ▓óīŹ¼F┴╦ę╗ĘN¤oŠĆęĢŅl▒O┐žŽĄĮyŻ¼į┌Łh▒Ż▒O£yĪóųŪ─▄āxŲ„āx▒Ē▒O┐žĪó▄ć▌v╣▄└Ē▒O┐žĪółDŽ±▓╔╝»Ą╚ŅIė“ėąę╗Č©Ą─æ¬ė├Ū░Š░ĪŻ
1 ŽĄĮyĮYśŗ
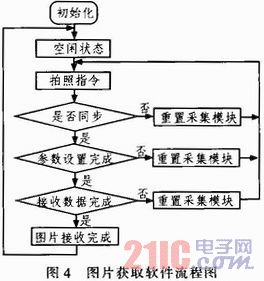
¤oŠĆęĢŅl▒O┐žŽĄĮyė╔ą┼╠¢▓╔╝»įOéõĪó▓╔╝»Č╦╠Ä└ĒŲ„Īó¤oŠĆöĄō■╩š░l─ŻēKĪóĮė╩šČ╦╠Ä└ĒŲ„Īóą┼╠¢▌ö│÷įOéõśŗ│╔Ż¼╚ńłD1╦∙╩ŠĪŻ
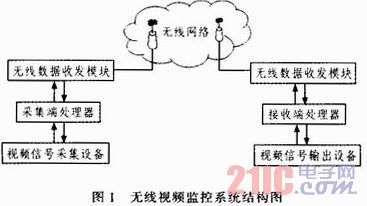
ęĢŅlą┼╠¢▓╔╝»įOéõ═©▀^özŽ±Ņ^─ŻēK▓ČūĮł÷Š░łDŽ±Ż¼ĮøŲõā╚▓┐╠Ä└ĒŲ„▐DōQ▌ö│÷öĄūųęĢŅlłDŽ±Ż¼×ķęĢŅlłDŽ±╠Ä└Ē╠ß╣®öĄō■ĪŻ▓╔╝»Č╦╠Ä└ĒŲ„žōž¤┤µā”║═╠Ä└Ēą┼╠¢▓╔╝»įOéõ▓╔╝»Ą─öĄō■║═Ųõ╦¹╣سc░l╦═Ą─öĄō■Ż¼═¼Ģr┐╔ģfš{┼cŲõ╦¹╣سcų«ķg═©ą┼ĪŻŠĆ╩š░l─ŻēKų„꬞ōž¤┼cŲõ╦¹╣سc═©ą┼Ż¼Įė╩šĪó░l╦═öĄō■║═Į╗ōQ┐žųŲą┼ŽóĪŻĮė╩šČ╦╠Ä└ĒŲ„žōž¤┤µā”║═╠Ä└ĒŲõ╦¹╣سc░l╦═Ą─ęĢŅlĪółDŽ±öĄō■Ż¼ę▓┐╔ģfš{┼cŲõ╦¹╣سcų«ķg═©ą┼ĪŻęĢŅlą┼╠¢▌ö│÷įOéõ╝┤īóĮė╩šČ╦╠Ä└ĒŲ„░l╦═Ą─ęĢŅlöĄō■▀ĆįŁ│╔įŁł÷Š░łDŽ±ĪŻ
2 ŽĄĮyė▓╝■ļŖ┬ĘįOėŗ
2Ż«1 CC1100╝░PTC08║åĮķ
CC1100╩Ūę╗┐ŅĄ═│╔▒Šå╬Ų¼UHF╩š░lŲ„Ż¼īŻ×ķĄ═╣”║─¤oŠĆæ¬ė├Č°įOėŗĪŻ╦³ų„ę¬╩Ū×ķ315Īó433Īó868║═915 MHzĄ─ISM║═SRDįOéõ╦∙įOėŗŻ¼┐╔ęįŠÄ│╠╣żū„į┌300Ī½1 000 MHzĘČć·ų«ķgĄ─╚╬ę╗Ņl┬╩╔ŽĪŻŠ▀ėą┐╣Ė╔ö_─▄┴”ÅŖĪóöĄō■é„▌ö╦┘┬╩Ė▀Īóš`┤a┬╩Ą═Ą╚ā׳cŻ¼ų¦│ų═Ė├„Ą─öĄō■é„▌ö╝░DLŻ»645ęÄ╝sĪŻį┌░l╔õĀŅæBŽ┬Ż¼Ųõ░l╔õ╣”┬╩┐╔ŠÄ│╠š{╣ØŻ¼ŲõūŅ┤¾░l╔õ╣”┬╩▀_ĄĮ10 dBMĪŻ
PTC08┤«┐┌özŽ±Ņ^╩Ū╝»łDŽ±▓╔╝»Īó┼─öz┐žųŲĪóöĄō■ē║┐sĪó┤«┐┌é„▌öė┌ę╗¾wĄ─╣żśI╝ēłDŽ±▓╔╝»╠Ä└Ē─ŻēKĪŻś╦£╩╚²ŠĆ╩ĮRS-232═©ą┼Įė┐┌Īó║åå╬Ą─łDŽ±é„▌öģfūhŻ¼╩╣─ŻēK┐╔ęįĘĮ▒ŃĄžīŹ¼F┼cļŖ─Xęį╝░Ė„ĘNŪČ╚ļ╩ĮŽĄĮyĄ─▀BĮėĪŻ
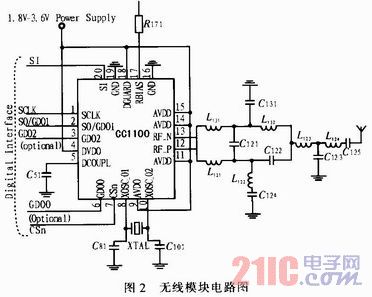
2Ż«2 ė▓╝■ļŖ┬ĘįOėŗ
CC1100Ą─╣żū„ĀŅæBėąIDEL(┤²ÖC)ĪóRX(Įė╩š)ĪóTX(░l╦═)Ż¼═¼Ģrų¦│ų▀h│╠åŠąč╣”─▄Ż¼▀@śė┐╔ęįĮĄĄ═╣”║─ĪŻų„ꬥ─ę²─_×ķVCCļŖį┤▌ö╚ļ(1Ż«9Ī½3Ż«6V)ĪóSIöĄō■▌ö╚ļĪóSOöĄō■▌ö│÷ĪóSCLKĢrńŖ▌ö╚ļĪóGD00║═GD02×ķöĄūų▌ö│÷╣®£yį接Įy╩╣ė├Ż¼CSN×ķąŠŲ¼Ų¼▀xą┼╠¢ĪŻąŠŲ¼ā╚ų├64 ByteĄ─TX║═RXŠÅø_Ų„ĪŻ╬─ųąįOėŗ┴╦łD2╦∙╩ŠĄ─¤oŠĆļŖ┬ĘĪŻöĄō■▓┘ū„═©▀^STC11F32XEå╬Ų¼ÖCĄ─SPI┐┌▀MąąĪŻ
ĪĪĪĪī”▒ŠŽĄĮyüĒšfŻ¼PTC08┤«┐┌özŽ±Ņ^─ŻēK┼c╬ó┐žųŲŲ„▓╔ė├┤«┐┌═©ą┼ĘĮ╩ĮĪŻ╬ó┐žųŲŲ„═©▀^ŲõRXČ╦Ž“PTC08░l╦═┼─ššĄ─ę╗ŽĄ┴ąųĖ┴ŅŻ¼özŽ±Ņ^─ŻēK▓╔╝»═ĻöĄō■Ż¼╩šĄĮ░l╦═öĄō■ųĖ┴Ņ║¾Ż¼Ģ■═©▀^ŲõTXČ╦┐┌īółDŽ±öĄō■╦═ų┴╬ó┐žųŲŲ„ĪŻCC1100-232╩šĄĮöĄō■ĢrŻ¼Ģ■ūįäėīóöĄō■Å─┤«┐┌╦═ų┴Įė╩šČ╦╠Ä└ĒŲ„ĪŻ╬ó┐žųŲŲ„ĪóPTC08║═CC1100─ŻēKķgĄ─Įė┐┌╩ŠęŌłD╚ńłD3╦∙╩ŠĪŻ
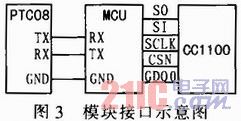
3 ŽĄĮy▄ø╝■įOėŗ
ŽĄĮy▓╔ė├å╬Ų¼ÖCĪó¤oŠĆ╩š░l─ŻēK╝░┤«┐┌özŽ±Ņ^─ŻēKüĒīŹ¼FŻ¼Ž┬╬╗ÖC▄ø╝■▓╔ė├ģRŠÄšZčįŠÄīæŻ¼╔Ž╬╗ÖC▄ø╝■ŠÄ│╠▓╔ė├VC++šZčįĪŻį┌īŹļH▓┘ū„▀^│╠ųąŻ¼┐╔═©▀^╔Ž╬╗ÖC│╠ą“īóŅAŽ╚Č©┴x║├Ą─ųĖ┴Ņ░l╦═ĄĮ▓╔╝»Č╦╠Ä└ĒŲ„Ż¼┐žųŲ▓╔╝»─ŻēKäėū„Ż¼½@╚ĪłDŲ¼öĄō■Ż╗▓╔╝»Č╦╠Ä└ĒŲ„Ģ■└¹ė├¤oŠĆ╩š░l─ŻēKīóöĄō■é„ų┴Įė╩šČ╦╠Ä└ĒŲ„Ż¼▀MČ°į┌╔Ž╬╗ÖC╔Ž╗ųÅ═│÷JPEGłDŲ¼ĪŻ
3Ż«1 PTC08─ŻēK│§╩╝╗»┼õų├
PTC08─ŻēK╔ŽļŖų«║¾Ż¼čėĢr2Ż«5 sŻ¼╬ó┐žųŲŲ„Ž“Ųõ░l╦═ę╗ŽĄ┴ą┐žųŲųĖ┴ŅŻ¼░³└©Å═╬╗ĪóįOų├łDŲ¼┤¾ąĪĪóē║┐s┬╩Īó┼─ššĪóūx╚ĪöĄō■Ż¼═Żų╣┼─ššĄ╚ĪŻĖ∙ō■─ŻēK┼c╬ó┐žųŲŲ„Ą─═©ą┼ģfūhŻ¼╬ó┐žųŲŲ„īóPTC08─ŻēKÅ═╬╗Ą─ģRŠÄšZčį▓┐Ęų┤·┤a╚ńŽ┬(Ū░╠ß╩Ū╔Ž╬╗ÖCęčīóÅ═╬╗ųĖ┴ŅöĄō■56 00 26 00Ęųäe┤µ╚ļ╬ó┐žųŲŲ„RAMĄ─70Hų┴73Hå╬į¬ųą)Ż║
ĪĪĪĪ
PTC08─ŻēKį┌╩šĄĮ┤╦Å═╬╗ųĖ┴Ņ║¾Ż¼Ģ■Ž“╬ó┐žųŲŲ„░l│÷7600 26 00Ż¼▒Ē╩Š─ŻēKÅ═╬╗│╔╣”ĪŻ─ŻēKŲõ╦¹ųĖ┴ŅöĄō■┐╔į┌ŲõöĄō■╩ųāįųą▓ķįāĪŻ
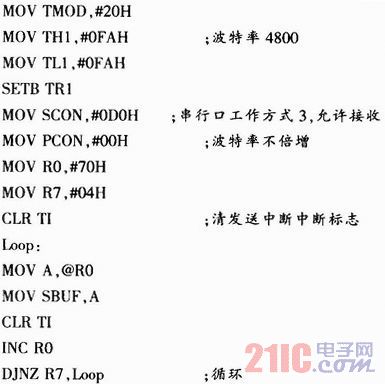
3Ż«2 ╔Ž╬╗ÖC▄ø╝■įOėŗ
łD4×ķ½@╚ĪłDŲ¼Ą─╔Ž╬╗ÖC▄ø╝■┴„│╠łDŻ¼ŲõĀŅæB╝░║»öĄ├Ķ╩÷╚ńŽ┬ĪŻ
1)┐šķeĀŅæB
▓╔╝»Č╦özŽ±Ņ^─ŻēK╠Äė┌┤²ÖCĀŅæBĪŻ
2)═¼▓ĮĀŅæB
«ö▓╔╝»Č╦özŽ±Ņ^─ŻēKĮė╩šĄĮ┼─ššųĖ┴ŅĢrŻ¼özŽ±Ņ^─ŻēKīó▀Mąąę╗┤╬═¼▓Į▓┘ū„Ż¼ęį┤_▒ŻŲõ┐╔ė├ĪŻ┤╦ĀŅæB╩╣ė├║»öĄ╚ńŽ┬Ż║
Public void vSynchronize(void)Ż╗┤╦║»öĄūŅČÓ┐╔▀B└mł╠ąą60┤╬ĪŻ╚¶║»öĄį┌ł╠ąąŲ┌ķgŻ¼UARTĮė╩šĄĮ0XAAŻ¼0XODŻ¼0X0EŻ¼0X00Ż¼XX(XX×ķ╚╬ęŌ)öĄō■ą“┴ąŻ¼ät▒Ē╩ŠözŽ±Ņ^─ŻēK═¼▓Įą┼╠¢ęčĮø▒╗┤_šJ│╔╣”ĪŻ╚¶║»öĄ▀B└mł╠ąą60┤╬║¾Ż¼UART╚į─®Įė╩šĄĮÅ─özŽ±Ņ^─ŻēK░l│÷Ą─┤_šJą┼╠¢Ż¼ätąĶųžą┬┼õų├▓╔╝»─ŻēKĪŻ
3)ģóöĄįOų├ĀŅæB
Ė∙ō■╔·│╔łDŲ¼ųĖ┴ŅŻ¼ąĶī”özŽ±Ņ^─ŻēK▀MąąģóöĄįOų├Ż¼░³└©łDŲ¼┤¾ąĪĪóē║┐s┬╩ęį╝░▌ö│÷łDŲ¼öĄō■░³Ą─┤¾ąĪĪŻ┤╦▀^│╠╩╣ė├║»öĄ╚ńŽ┬Ż║
PUBLIC void vlnitialCamera(void)Ż╗
PUBLIC void vSetPKGSzie(void)Ż╗╚ń╣¹▓╔╝»─ŻēKüĒ░l╗ž┤_šJą┼ŽóŻ¼ąĶī”Ųõųžą┬┼õų├ĪŻ
4)öĄō■Įė╩šĀŅæB
ę╗Ą®ģóöĄįOų├═Ļ│╔ų«║¾Ż¼═Ō▓┐┐žųŲŲ„īó░l│÷“ķ_╩╝łDŲ¼½@╚Ī”ųĖ┴ŅŻ¼özŽ±Ņ^─ŻēKĢ■ūįäė▀MąąłDŲ¼öĄō■Ą─½@╚Ī┼c▐DōQĪŻĖ∙ō■ų«Ū░įOų├Ą─ģóöĄŻ¼▀B└m▌ö│÷łDŲ¼öĄō■░³ĪŻĄ½╩ŪŻ¼├┐éĆŠWŲ¼öĄō■░³Å─özŽ±Ņ^─ŻēK░l│÷ų«║¾Ż¼Įė╩šČ╦╠Ä└ĒŲ„Š∙ąĶę¬ĘĄ╗žę╗éĆ┤_šJ░³Ż¼ų«║¾▓┼┐╔ęį½@Ą├Ž┬ę╗░³öĄō■ĪŻ┤╦▀^│╠╩╣ė├║»öĄ╚ńŽ┬Ż║
PUBLIC void vGetPKG(void)Ż╗
łDŲ¼öĄō■Ą─▀ĆįŁīóė╔╔Ž╬╗ÖC▄ø╝■ų▒Įė═Ļ│╔Ż¼īó┤_šJ░³ĘĄ╗žĮo▓╔╝»Č╦╠Ä└ĒŲ„Ą─║»öĄ×ķŻ║
PUBLIC void vSetPKTACK(uint16 u16PktCounter)Ż╗
Ųõųąu16PktCounter╩ŪųĖŽ┬ę╗éĆę¬½@╚ĪöĄō■░³Ą─ŠÄ╠¢ĪŻ╚¶╔Ž╬╗ÖCĮń├µķLĢrķgā╚ø]ėą½@Ą├öĄō■Ż¼╔Ž╬╗ÖCŽĄĮyätūįäėųžą┬┼õų├▓╔╝»─ŻēKĪŻ
5)łDŲ¼Įė╩š═Ļ│╔ĀŅæB
«ö═Ō▓┐┐žųŲŲ„Įo│÷“ķ_╩╝▐DōQ”Ą─ųĖ┴Ņų«║¾Ż¼Ą┌ę╗éĆ▌ö│÷Ą─öĄō■░³└’ęčĮø░³║¼┴╦łDŲ¼öĄō■Ą─┤_Ūą┤¾ąĪĪŻę“┤╦Ż¼į┌▀@éĆļAČ╬Ż¼╚ń╣¹│╔╣”½@╚ĪĄ─öĄō■┤¾ąĪĄ╚ė┌Ą┌ę╗éĆöĄō■░³Įo│÷Ą─łDŲ¼öĄō■┤¾ąĪŻ¼šf├„łDŲ¼öĄō■ęčĮø═Ļš¹Ą─Å─özŽ±Ņ^─ŻēKé„│÷Ż¼özŽ±Ņ^─ŻēKųžą┬▀M╚ļ┐šķeĀŅæBŻ¼Ą╚┤²Ž┬ę╗éĆ┼─ššųĖ┴ŅĪŻ
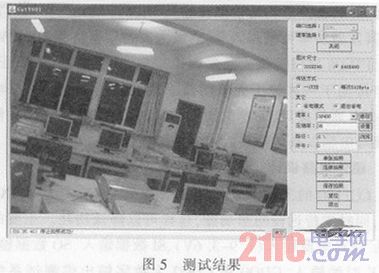
▀h│╠┐═æ¶Č╦▓╔ė├▒O┐ž╣▄└Ē▄ø╝■Ż¼═©▀^ī”┤«┐┌Īó▓©╠ž┬╩ĪółDŲ¼┤¾ąĪĄ╚ģóöĄĄ─įOų├Ż¼░l╦═▀h│╠▒O┐žųĖ┴ŅŻ¼Įė╩šęĢŅl▓╔╝»─ŻēKĄ─ą┼ŽóŻ¼īŹ¼FöĄō■╠Ä└ĒĪóĮė╩šĪó┤µā”║═’@╩ŠŻ¼īó▓╔╝»Ą─łDŲ¼ą┼Žóęįų▒ė^ĘĮ╩Į│╩¼FĮo▒O┐ž╚╦åTĪŻ£yįćĮY╣¹╚ńłD5╦∙╩ŠĪŻ
4 ĮYšō
įōŽĄĮy▓╔ė├╬ó┐žųŲŲ„Īó¤oŠĆ╩š░l─ŻēK╝░┤«┐┌özŽ±Ņ^─ŻēKPTC08īŹ¼F¤oŠĆęĢŅl▒O┐žŽĄĮyŻ¼ī”ŲõįŁ└Ē╝░▄øė▓╝■īŹ¼FĘĮĘ©▀Mąą┴╦║å꬚f├„ĪŻĮø£yįć▒Ē├„Ż¼ŽĄĮy║åå╬┐╔┐┐Īó╣”║─ąĪĪó│╔▒ŠĄ═Ż¼┐╣Ė╔ö_─▄┴”ÅŖŻ╗ė╔ė┌CC1100¤oŠĆ╩š░l─ŻēKé„▌ööĄō■╦┘Č╚Ą═Ż¼¤oĘ©īŹ¼Fšµš²Ą─īŹĢré„▌öŻ¼┐╔æ¬ė├ė┌īŹĢrąįę¬Ū¾▓╗Ė▀Ą─ł÷╦∙ĪŻ





