Į³üĒé„ĖąŲ„╝╝ąg(sh©┤)║═¤oŠĆ═©ą┼╝╝ąg(sh©┤)Ą─░l(f©Ī)š╣ī¦(d©Żo)ų┬┴╦ę╗éĆ(g©©)ą┬Ė┼─ŅĄ─šQ╔·ę╗é„ĖąŲ„ŠW(w©Żng)Įj(lu©░)Ż¼╝┤ę╗éĆ(g©©)ė╔▒ŠĄžé„ĖąŲ„╣Ø(ji©”)³c(di©Żn)╦∙ĮM│╔Ą─Š▀ėąĖąų¬Īó╠Ä└Ē║══©ą┼─▄┴”Ą─ę╗ĘNÅVĘ║æ¬(y©®ng)ė├Ą─ŠW(w©Żng)Įj(lu©░)ĪŻ×ķ┴╦Ė³╔Ņ╚ļĄž═┌Š“é„ĖąŲ„ŠW(w©Żng)Įj(lu©░)╦∙Š▀ėąĄ──▄┴”Ż¼╣Pš▀╠ß│÷┴╦ę╗ĘN┐╔öU(ku©░)š╣Ęų▓╝╩ĮĄ─ČÓ─┐ś╦(bi©Īo)Ė·█Ö║═╠žš„╣▄└ĒĘĮĘ©Ż¼įōĘĮĘ©─▄ē“═©▀^ę╗éĆ(g©©)é„ĖąŲ„ŠW(w©Żng)Įj(lu©░)ī”(du©¼)ČÓéĆ(g©©)─┐ś╦(bi©Īo)īŹ(sh©¬)¼F(xi©żn)Ė·█Ö║═╠žš„╣▄└ĒĪŻ
é„Įy(t©»ng)Ą─ČÓ─┐ś╦(bi©Īo)Ė·█ÖĘĮĘ©Ż¼╚ńMHTĖ·█ÖŲ„Ż¼▓╗▀mė├ė┌é„ĖąŲ„ŠW(w©Żng)Įj(lu©░)ĪŻČ°¼F(xi©żn)ėą╗∙ė┌é„ĖąŲ„ŠW(w©Żng)Įj(lu©░)Ą─╦ŃĘ©āH╗∙ė┌╚ńŽ┬ŪķørŻ║╦∙Ė·█Ö─┐ś╦(bi©Īo)Ą─öĄ(sh©┤)┴┐ęčų¬▓╗ūāŻ¼▓óŪę╦³éāĄ─▀\(y©┤n)äė(d©░ng)▄ē█Eī”(du©¼)ė┌▒ŠĄžé„ĖąŲ„ęčų¬ĪŻČ°į┌▒Š╬─ųąŻ¼╣Pš▀Ę┼īÆ┴╦ęį╔Ž╝┘įO(sh©©)Ż¼ą╬│╔ī”(du©¼)ė┌Ęų▓╝╩ĮČÓ─┐ś╦(bi©Īo)Ą─Ė·█Ö║═╠žš„╣▄└Ē╦ŃĘ©DMTIMĪŻ╬─ųąį┌īŹ(sh©¬)¼F(xi©żn)öĄ(sh©┤)ō■(j©┤)ĻP(gu©Īn)┬ō(li©ón)║═ČÓ─┐ś╦(bi©Īo)Ė·█Ö▀\(y©┤n)ė├┴╦±RĀ¢┐ŲĘ“µ£├╔╠ž┐©┴_öĄ(sh©┤)ō■(j©┤)ĻP(gu©Īn)┬ō(li©ón)MCMCDAĄ─ĘĮĘ©Ż¼īŹ(sh©¬)Ģr(sh©¬)ī”(du©¼)╬┤ų¬öĄ(sh©┤)┴┐Ą─ČÓ─┐ś╦(bi©Īo)▀M(j©¼n)ąąĖ·█ÖĪŻMCMCDAĘĮĘ©─▄ē“¬Ü(d©▓)┴óĄžī”(du©¼)▄ē█E▀M(j©¼n)ąąŲ╩╝║═ĮKų╣Ż¼▓ó─▄ē“Ė·█Ö╬┤ų¬öĄ(sh©┤)┴┐Ą─ČÓ─┐ś╦(bi©Īo)ĪŻ├┐éĆ(g©©)é„ĖąŲ„─▄ē“▀\(y©┤n)ė├MCMCDAėąą¦ĄžĖ·█Öę╗ĮM╬┤ų¬öĄ(sh©┤)┴┐Ą──┐ś╦(bi©Īo)Ż¼▓óŪę─▄ē“?q©▒)”─┐ś?bi©Īo)Ą─╠žš„▀M(j©¼n)ąąĘų▓╝╩ĮĄž╣▄└ĒĪŻ
▒Š╬─ĮY(ji©”)śŗ(g©░u)╚ńŽ┬Ż║Ęų▓╝╩ĮČÓ─┐ś╦(bi©Īo)Ą─Ė·█Ö┼c╠žš„╣▄└Ē╦ŃĘ©Ė┼╩÷Ż╗ČÓ─┐ś╦(bi©Īo)Ė·█Öå¢Ņ}╝░ŲõĖ┼┬╩─Żą═Ż╗DMTIMĻP(gu©Īn)µI╦ŃĘ©öó╩÷Ż║±RĀ¢┐ŲĘ“µ£├╔╠ž┐©┴_öĄ(sh©┤)ō■(j©┤)ĻP(gu©Īn)┬ō(li©ón)╦ŃĘ©Ż╗DMTIMĮM│╔▓┐ĘųĮķĮBŻ¼░³└©öĄ(sh©┤)ō■(j©┤)ĻP(gu©Īn)┬ō(li©ón)ĪóČÓ─┐ś╦(bi©Īo)Ė·█ÖĪó╠žš„╣▄└Ē║═ą┼Žó╚┌║ŽŻ╗DMTIM╦ŃĘ©Ę┬šµįć“×(y©żn)╝░įu(p©¬ng)╣└ĪŻ
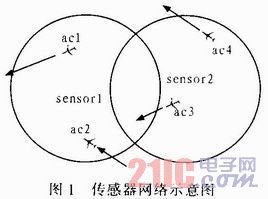
1 Ęų▓╝╩ĮČÓ─┐ś╦(bi©Īo)Ė·█Ö║═╠žš„╣▄└Ē
╬─ųąčąŠ┐ųž³c(di©Żn)╩Ūé„ĖąŲ„ŠW(w©Żng)Įj(lu©░)ųąČÓ─┐ś╦(bi©Īo)Ą─Ė·█Ö║═╠žš„╣▄└ĒĘĮĘ©ĪŻ├┐éĆ(g©©)é„ĖąŲ„ōĒėąūį╝║Ą─ė^£y(c©©)ģ^(q©▒)ė“Ż¼ŪęōĒėą┼cŲõÓÅĮ³é„ĖąŲ„═©ą┼Ą──▄┴”ĪŻ╚ńłD1╦∙╩Šę╗éĆ(g©©)║å(ji©Żn)å╬Ą─Č■é„ĖąŲ„Ą─ŽĄĮy(t©»ng)Ż¼┤¾łA╚”┤·▒Ēé„ĖąŲ„Ą─ė^£y(c©©)ģ^(q©▒)ė“ĪŻ├┐éĆ(g©©)é„ĖąŲ„─▄ē“?q©▒)”ČÓ─┐ś?bi©Īo)▀M(j©¼n)ąąĖ·█Ö▓óį┌ė^£y(c©©)ģ^(q©▒)ė“ā╚(n©©i)╣▄└Ē─┐ś╦(bi©Īo)╠žš„ĪŻįōå¢Ņ}Ą─ļy³c(di©Żn)į┌ė┌ė^£y(c©©)ģ^(q©▒)ė“ā╚(n©©i)─┐ś╦(bi©Īo)Ą─öĄ(sh©┤)┴┐Ģ■(hu©¼)ļSĢr(sh©¬)ķgČ°ūā╗»Ż¼ę“┤╦╬ęéā▒žĒÜīżŪ¾ę╗ĘN┐╔öU(ku©░)š╣Ą─Ż¼į┌ŽÓÓÅé„ĖąŲ„ųąŠ▀ėą▒ŠĄžę╗ų┬ąįĄ─ĘĮĘ©ĪŻ
╣Pš▀╠ß│÷Ą─┐╔öU(ku©░)š╣Ą─Ęų▓╝╩ĮČÓ─┐ś╦(bi©Īo)Ė·█Ö┼c╠žš„╣▄└ĒDMTIM╦ŃĘ©─▄ī”(du©¼)╬┤ų¬öĄ(sh©┤)┴┐ŪęöĄ(sh©┤)┴┐ļSĢr(sh©¬)ūā╗»Ą─ÖC(j©®)äė(d©░ng)─┐ś╦(bi©Īo)▀M(j©¼n)ąąĖ·█ÖŻ¼ī”(du©¼)Ųõ╠žš„▀M(j©¼n)ąąėąą¦Ą─╣▄└ĒĪŻ▓ó─▄ē“į┌ę╗éĆ(g©©)Ęų▓╝╩ĮĄ─é„ĖąŲ„ŠW(w©Żng)Įj(lu©░)ųą▀M(j©¼n)ąąīŹ(sh©¬)¼F(xi©żn)ĪŻī”(du©¼)ė┌├┐ę╗éĆ(g©©)é„ĖąŲ„Ż¼DMTIMųąĄ─ČÓ─┐ś╦(bi©Īo)Ė·█Ö╦ŃĘ©žō(f©┤)ž¤(z©”)╣└╦Ń╚ńŽ┬┴┐Ż║─┐ś╦(bi©Īo)Ą─öĄ(sh©┤)┴┐Ż¼ė^£y(c©©)ģ^(q©▒)ė“ā╚(n©©i)╦∙ėą─┐ś╦(bi©Īo)Ą─▀\(y©┤n)äė(d©░ng)▄ē█EŻ¼ęį╝░į┌╠žš„╣▄└Ē╦ŃĘ©ųąīóė├ĄĮĄ─╗ņ║ŽŠžĻć║═▒ŠĄžą┼ŽóĪŻ╚╗║¾Ż¼ŽÓÓÅĄ─é„ĖąŲ„═©▀^ŽÓ╗ź═©ą┼ī”(du©¼)▒ŠĄžĀŅæB(t©żi)╣└╦ŃųĄ║═ą┼╚╬ŠžĻć▀M(j©¼n)ąąĮ╗ōQĪŻ═¼Ģr(sh©¬)Ż¼═©▀^ą┼Žó╚┌║ŽīŹ(sh©¬)¼F(xi©żn)┴╦▒ŠĄžę╗ų┬ąįŻ¼▀M(j©¼n)Č°īŹ(sh©¬)¼F(xi©żn)╚½Šųę╗ų┬ąįĪŻ
▒Š╬─Ą─╩ŻėÓ▓┐Ęųī”(du©¼)DMTIMĄ─╦ŃĘ©─ŻēK▀M(j©¼n)ąą┴╦įö╝Ü(x©¼)├Ķ╩÷▓óŪę▀Ćī”(du©¼)ČÓ─┐ś╦(bi©Īo)Ė·█Öå¢Ņ}Ż¼ęį╝░±RĀ¢┐ŲĘ“µ£├╔╠ž┐©┬ÕöĄ(sh©┤)ō■(j©┤)ĻP(gu©Īn)┬ō(li©ón)▀M(j©¼n)ąą┴╦├Ķ╩÷ĪŻ
2 ČÓ─┐ś╦(bi©Īo)Ė·█Ö
╗∙ė┌├┐éĆ(g©©)é„ĖąŲ„ęĢę░ĘČć·ā╚(n©©i)Ą──┐ś╦(bi©Īo)öĄ(sh©┤)┴┐Ģ■(hu©¼)ļSĢr(sh©¬)ķg▓╗öÓūā╗»Ż¼▒Šš┬╠ß│÷Ą─DMTIMČÓ─┐ś╦(bi©Īo)Ė·█Ö▀mæ¬(y©®ng)ė┌┤╦ŅÉČÓ─┐ś╦(bi©Īo)öĄ(sh©┤)┴┐▓╗┤_Č©Ą─ŪķørĪŻ
2Ż«1 å¢Ņ}─Ż╩Į
įO(sh©©)T∈Z+×ķé„ĖąŲ„ė^£y(c©©)│ų└m(x©┤)Ą─Ģr(sh©¬)ķgŻ¼K×ķįōĢr(sh©¬)ķgā╚(n©©i)ė^£y(c©©)ĘČć·Rųą╦∙│÷¼F(xi©żn)Ą──┐ś╦(bi©Īo)öĄ(sh©┤)┴┐ĪŻį┌─│Ģr(sh©¬)ķgČ╬ā╚(n©©i)Ż¼├┐ę╗éĆ(g©©)─┐ś╦(bi©Īo)Č╝į┌RĘČć·ā╚(n©©i)ęŲäė(d©░ng)Ż¼K║═Ą─ųĄ╬┤ų¬ĪŻ├┐éĆ(g©©)─┐ś╦(bi©Īo)Č╝╩Ūį┌─│Ģr(sh©¬)ķg³c(di©Żn)ļSÖC(j©®)│÷¼F(xi©żn)į┌RĘČć·ā╚(n©©i)Ż¼ų▒ĄĮį┌Ģr(sh©¬)ķg³c(di©Żn)Ģr(sh©¬)Ž¹╩¦ĪŻī”(du©¼)ė┌├┐éĆ(g©©)Ģr(sh©¬)ķg³c(di©Żn)Ż¼─┐ś╦(bi©Īo)▒Ż│ųŲõ┤µį┌Ą─Ė┼┬╩×ķ1-pzŻ¼Ž¹╩¦Ą─┐«┬╩×ķpzĪŻī”(du©¼)ė┌├┐ę╗éĆ(g©©)Ģr(sh©¬)ķg³c(di©Żn)Ż¼į┌RĘČć·ā╚(n©©i)╦∙│÷¼F(xi©żn)─┐ś╦(bi©Īo)Ą─öĄ(sh©┤)┴┐Č╝Š▀ėąę╗éĆ(g©©)╬╗ų├Ęų▓╝Ż¼įō╬╗ų├Ęų▓╝░³║¼ģóöĄ(sh©┤)λbVŻ¼Ųõųąλb▒Ē╩Šå╬╬╗Ģr(sh©¬)ķgå╬╬╗ĘČć·ā╚(n©©i)Ą─│÷¼F(xi©żn)┬╩Ż¼V▒Ē╩Šė^£y(c©©)ĘČć·RĄ─┤¾ąĪĪŻ▓ó╠žČ©├┐éĆ(g©©)ą┬─┐ś╦(bi©Īo)Ą─│§╩╝╬╗ų├Č╝į┌RĘČć·ā╚(n©©i)ĪŻ
įO(sh©©)×ķ─┐ś╦(bi©Īo)kĄ─ļx╔óĢr(sh©¬)ķg▀\(y©┤n)äė(d©░ng)Ż¼Ųõųąnx╩ŪĀŅæB(t©żi)ūā╗»Ą─ŠSČ╚ĪŻ▓óįO(sh©©)×ķĢr(sh©¬)┐╠t─┐ś╦(bi©Īo)kĄ─ĀŅæB(t©żi)ĪŻ─┐ś╦(bi©Īo)tĄ─▀\(y©┤n)äė(d©░ng)Ę■Å─╣½╩Į(1)Ż║
ĪĪĪĪ

Ųõųąī┘ė┌░ūįļ┬Ģ▀^│╠Ż¼░³║¼į┌┴╦─┐ś╦(bi©Īo)ĘŪų▒ŠĆ▀\(y©┤n)äė(d©░ng)─Żą═ĪŻ▓ó▀\(y©┤n)ė├ę╗éĆ(g©©)╠Į£y(c©©)Ė┼┬╩pdüĒėŗ(j©¼)╦Ń─┐ś╦(bi©Īo)ĀŅæB(t©żi)Ą─įļ┬ĢĪŻ─┐ś╦(bi©Īo)▓╗▒╗░l(f©Ī)¼F(xi©żn)▓ó▒╗ęĢ×ķĖ·█ÖüG╩¦Ą─┐«┬╩×ķ1-pdĪŻ▒Š╬─įO(sh©©)Č©┴╦Õe(cu©░)š`ł¾(b©żo)Š»Ż¼ŲõöĄ(sh©┤)┴┐ę▓ū±čŁ║¼ėąģóöĄ(sh©┤)λfVĄ─╬╗ų├Ęų▓╝Ż¼Ųõųąλf╩Ūå╬╬╗ė^£y(c©©)ĘČć·å╬╬╗Ģr(sh©¬)ķgā╚(n©©i)Ą─Õe(cu©░)š`ł¾(b©żo)Š»┬╩ĪŻįO(sh©©)n(t)×ķĢr(sh©¬)ķg³c(di©Żn)tė^£y(c©©)³c(di©Żn)Ą─öĄ(sh©┤)┴┐Ż¼įōöĄ(sh©┤)┴┐░³└©┴╦įļ┬Ģė^£y(c©©)║═Õe(cu©░)š`ł¾(b©żo)Š»ĪŻįO(sh©©)×ķĢr(sh©¬)ķg³c(di©Żn)tĄ─Ą┌jéĆ(g©©)ė^£y(c©©)ųĄŻ¼Ųõųąny╩Ū├┐ę╗éĆ(g©©)ė^£y(c©©)Ž“┴┐Ą─ŠSČ╚ĪŻ├┐éĆ(g©©)▒╗£y(c©©)╬’¾wČ╝Ģ■(hu©¼)į┌įō▓╔śėĢr(sh©¬)ķg«a(ch©Żn)╔·ę╗éĆ(g©©)╠žČ©Ą─ė^£y(c©©)ųĄŻ¼╚ń╣½╩Į(2)╦∙╩ŠŻ¼Ųõųą×ķė^£y(c©©)ųĄ─Żą═ĪŻ
ĪĪĪĪ

Ųõųą╩Ū░ūįļ┬Ģ▀^│╠Ż¼u(t)ūŃÕe(cu©░)š`ł¾(b©żo)Š»Ą─ļSÖC(j©®)▀^│╠ĪŻ─┐ś╦(bi©Īo)╩Ūė^£y(c©©)─┐ś╦(bi©Īo)ŅÉą═╗“?q©▒)┘ąįą┼ŽóŻ¼ĀŅæB(t©żi)ūā┴┐┐╔ęįöU(ku©░)š╣ĄĮ░³└©─┐ś╦(bi©Īo)ŅÉą═Ą─ą┼ŽóĪŻę“┤╦ČÓ─┐ś╦(bi©Īo)ūR(sh©¬)äeĄ─å¢Ņ}╝┤╩ŪÅ─ė^£y(c©©)ųĄųąėŗ(j©¼)╦Ń│÷Ż¼Ųõųąk=1Ż¼…Ż¼KĪŻ
2Ż«2 ČÓ─┐ś╦(bi©Īo)Ė·█ÖĘĮĘ©
įO(sh©©)×ķĢr(sh©¬)ķgtĄ─╦∙ėąųĄŻ¼Y={y(t)Ż║1≤f≤T}×ķĢr(sh©¬)ķgt=1ĄĮt=TĄ─╦∙ėąėŗ(j©¼)╦ŃųĄĪŻįO(sh©©)Ω×ķ╦∙ėąYĄ─╝»║ŽŻ¼Ūęω∈ΩŻ¼ėą╚ńŽ┬ģóöĄ(sh©┤)Ż║
ĪĪĪĪ
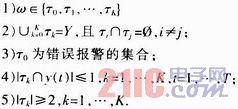
ĪĪĪĪĘųļxĄ─▀^│╠╚ńłD2╦∙╩ŠŻ¼ŲõųąK×ķ▄ē█EöĄ(sh©┤)┴┐Ż¼|Tk|×ķTkĄ─╗∙öĄ(sh©┤)Ż¼«ö(d©Īng)ø]ėą▄ē█E╗źö_Ą─ŪķørŽ┬šJ(r©©n)×ķTk×ķę╗éĆ(g©©)š²┤_Ą─▄ē█EĪŻ╝┘įO(sh©©)ę╗Śl▄ē█Eų┴╔┘░³║¼ā╔éĆ(g©©)ė^£y(c©©)ųĄŻ¼ę“?y©żn)ķ▓╗─▄ė╔ę╗éĆ(g©©)å╬ę╗Ą─ė^▓ņųĄ┤_Č©ę╗Śl▄ē█EĪŻė┌╩Ūį┘╝┘įO(sh©©)e(t-1)×ķĢr(sh©¬)┐╠t-1ų«║¾─┐ś╦(bi©Īo)Ą─öĄ(sh©┤)┴┐Ż¼z(t)×ķĢr(sh©¬)┐╠tŽ¹╩¦Ą──┐ś╦(bi©Īo)Ą─öĄ(sh©┤)┴┐Ż¼c(t)=e(t-1)-z(t)×ķĢr(sh©¬)┐╠t-1ĄĮt╬┤Ž¹╩¦Ą─öĄ(sh©┤)┴┐ĪŻįO(sh©©)a(t)×ķĢr(sh©¬)┐╠tą┬│÷¼F(xi©żn)Ą──┐ś╦(bi©Īo)Ż¼d(t)×ķĢr(sh©¬)┐╠tĄ─īŹ(sh©¬)ļH─┐ś╦(bi©Īo)Ż¼g(t)=c(t)+a(t)-d(t)×ķ╬┤ūR(sh©¬)äeĄ──┐ś╦(bi©Īo)ĪŻūŅ║¾Ż¼įO(sh©©)f(t)=n(t)-d(t)×ķÕe(cu©░)š`ł¾(b©żo)Š»öĄ(sh©┤)┴┐Ż¼ėąŻ║
ĪĪĪĪ

ŲõųąP(ω|Y)╩ŪYĄ─ŽÓ╦ŲĖ┼┬╩ĪŻ
▒Š╬─▓╔ė├┴╦ūŅ┤¾║¾“×(y©żn)MAP╦ŃĘ©ĮŌøQČÓ─┐ś╦(bi©Īo)Ė·█Öå¢Ņ}ĪŻįō╦ŃĘ©ī”(du©¼)ė^£y(c©©)─┐ś╦(bi©Īo)▀M(j©¼n)ąąĘųĖŅŻ¼▓óĖ∙ō■(j©┤)ĘųĖŅī”(du©¼)─┐ś╦(bi©Īo)ĀŅæB(t©żi)▀M(j©¼n)ąą╣└╦ŃĪŻ
3 ±RĀ¢┐ŲĘ“µ£├╔╠ž┐©┬ÕöĄ(sh©┤)ō■(j©┤)╚┌║Ž
▒Š╣Ø(ji©”)╠ß│÷ę╗ĘNĮŌøQĄ┌Č■╣Ø(ji©”)ųąČÓ─┐ś╦(bi©Īo)Ė·█Öå¢Ņ}Ą─╦ŃĘ©Ż¼įō╦ŃĘ©╩Ūļx╔óČÓ─┐ś╦(bi©Īo)Ė·█Ö┼cūR(sh©¬)äe╦ŃĘ©─ŻēKĄ─║╦ą─ĪŻ
3Ż«1 ±RĀ¢┐ŲĘ“µ£├╔╠ž┐©┬Õ─Żą═
±RĀ¢┐ŲĘ“µ£├╔╠ž┐©┬Õ─Żą═╩Ūęčų¬╬©ę╗─▄į┌ČÓĒŚ(xi©żng)╩ĮĢr(sh©¬)ķgÅ═(f©┤)ļså¢Ņ}Ž┬īŹ(sh©¬)¼F(xi©żn)╣└ųĄėŗ(j©¼)╦ŃĄ─ĘĮĘ©Ż¼═¼Ģr(sh©¬)Ż¼▀Ć╩Ūę╗ĘNÅ─╬╗ė┌┐šķgΩĄ─Ęų▓╝πųą╠ß╚Ī│ķśėųĄĄ─Ųš▒ķĘĮĘ©Ż¼įōĘĮĘ©═©▀^ĀŅæB(t©żi)ųĄω∈Ω║═ĘĆ(w©¦n)Č©Ęų▓╝ųĄπ(ω)Į©┴óĄ─±RĀ¢┐ŲĘ“µ£MüĒīŹ(sh©¬)¼F(xi©żn)Ųõ╦ŃĘ©ĪŻ¼F(xi©żn)į┌üĒ├Ķ╩÷įō╦ŃĘ©ĪŻį┌ĀŅæB(t©żi)ω∈ΩŻ¼╝┘įO(sh©©)ω’∈ΩĘ■Å─Ęų▓╝q(ωŻ¼ω’)ĪŻČ°▀\(y©┤n)äė(d©░ng)Ą─Ėąų¬Ę■Å─Ėąų¬┐«┬╩A(ωŻ¼ω’)Ż¼ŲõųąŻ║
ĪĪĪĪ

╚╗Č°śė▒Š▒Ż│ųį┌ωĪŻ═©▀^ėŗ(j©¼)╦ŃŻ¼ŲĮ║ŌŚl╝■Ą├ęįØMūŃŻ¼└²╚ńŻ¼ī”(du©¼)ė┌╦∙ėąĄ─ωŻ║
ŲõųąŻ¼P(ωŻ¼ω’)=q(ωŻ¼ω’)A(ωŻ¼ω’)╩ŪÅ─ωĄĮω’Ą─▄S▀wĖ┼┬╩ĪŻ
ĪĪĪĪ╚ń╣¹MŠ▀╝s╩°ąį║═ĘŪų▄Ų┌ąįŻ¼▓óŪęMė╔▒ķÜvČ©└Ē╩šö┐ų┴Š∙ä“Ęų▓╝ĪŻę“┤╦Ż¼ī”(du©¼)ė┌ę╗éĆ(g©©)ĮoČ©Ą─ėąĮń║»öĄ(sh©┤)fŻ║Ω→RmŻ¼śė▒ŠŠ∙ųĄ Ż¼Ųõųąωn╩ŪMį┌Ģr(sh©¬)┐╠tĄ─ĀŅæB(t©żi)Ż¼«ö(d©Īng)Eπf(ω)╩šö┐ė┌N→∞ĪŻ┐╔ęįūóęŌĄĮ╣½╩Į(4)ų╗ąĶėŗ(j©¼)╦Ń│÷π(ω’)Ż»π(ω)Ą─▒╚ųĄŻ¼Č°¤oąĶī”(du©¼)π▀M(j©¼n)ąąś╦(bi©Īo)£╩(zh©│n)╗»ĪŻ
Ż¼Ųõųąωn╩ŪMį┌Ģr(sh©¬)┐╠tĄ─ĀŅæB(t©żi)Ż¼«ö(d©Īng)Eπf(ω)╩šö┐ė┌N→∞ĪŻ┐╔ęįūóęŌĄĮ╣½╩Į(4)ų╗ąĶėŗ(j©¼)╦Ń│÷π(ω’)Ż»π(ω)Ą─▒╚ųĄŻ¼Č°¤oąĶī”(du©¼)π▀M(j©¼n)ąąś╦(bi©Īo)£╩(zh©│n)╗»ĪŻ
3Ż«2 ±RĀ¢┐ŲĘ“µ£├╔╠ž┐©┬ÕöĄ(sh©┤)ō■(j©┤)ĻP(gu©Īn)┬ō(li©ón)
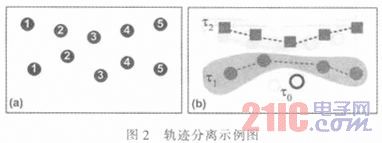
MCMCDA╦ŃĘ©╩Ū±RĀ¢┐ŲĘ“µ£├╔╠ž┐©┬Õ╦ŃĘ©Ą─╠ž╩Ōą╬╩ĮŻ¼ŲõĀŅæB(t©żi)┐šķg╩Ū╔Ž╬─į┌Ą┌2Ż«2╣Ø(ji©”)ųą╠ߥĮĄ─Ż¼▓óŪęŲõŲĮĘĆ(w©¦n)Ęų▓╝Ę■Å─╣½╩Į(3)ĪŻī”(du©¼)ė┌MCMCDAĄ─Ęų▓╝ėą5ŅÉäė(d©░ng)ū„ĮM│╔ĪŻ╦³éā░³└©Ż║1)░l(f©Ī)¼F(xi©żn)Ż»Ž¹╩¦▀\(y©┤n)äė(d©░ng)Ż╗2)ĘųĖŅŻ»║Ž▓ó▀\(y©┤n)äė(d©░ng)Ż║3)öU(ku©░)š╣Ż»£p╔┘▀\(y©┤n)äė(d©░ng)Ż╗4)Ė·█Ö╦óą┬▀\(y©┤n)äė(d©░ng)Ż╗5)Ė·█ÖŪąōQ▀\(y©┤n)äė(d©░ng)ĪŻ
MCMCDAĄ─▀\(y©┤n)äė(d©░ng)ĘĮ╩Į╚ńłD3ųą╦∙╩ŠŻ¼├┐éĆ(g©©)▀\(y©┤n)äė(d©░ng)Ą─įö╝Ü(x©¼)├Ķ╩÷į┌┤╦╩Ī┬įĪŻMCMCDAĄ─▌ö╚ļ╩Ūę╗ŽĄ┴ąė^£y(c©©)ųĄYŻ¼śė▒Šė^£y(c©©)ųĄĄ─éĆ(g©©)öĄ(sh©┤)nmcŻ¼│§╩╝ĀŅæB(t©żi)ωinitŻ¼ęį╝░ėąĮń║»öĄ(sh©┤)XŻ║Ω→RmĪŻī”(du©¼)ė┌įō╦ŃĘ©Ą─├┐ę╗▓ĮŻ¼ω╩Ū±RĀ¢┐ŲĘ“µ£Ą─«ö(d©Īng)Ū░ĀŅæB(t©żi)ĪŻŲõ½@╚ĪĖ┼┬╩A(ωŻ¼ω’)╚ń╣½╩Į(4)Ż¼▌ö│÷ĮėĮ³MMSEĄ─╣└ėŗ(j©¼)ųĄEπXŻ¼ŪęĮėĮ³MAPĄ─╣└ėŗ(j©¼)ųĄarg maxP(ω|Y)ĪŻ
4 Ęų▓╝╩ĮČÓ─┐ś╦(bi©Īo)Ė·█Ö┼c╠žš„╣▄└Ē╦ŃĘ©ĮY(ji©”)śŗ(g©░u)
¼F(xi©żn)į┌ī”(du©¼)Ęų▓╝╩ĮČÓ─┐ś╦(bi©Īo)Ė·█Ö┼c╠žš„╣▄└Ē╦ŃĘ©▀M(j©¼n)ąąįö╝Ü(x©¼)├Ķ╩÷ĪŻ▀\(y©┤n)ė├ę╗ĘNą┼─ŅŽ“┴┐üĒ▒Ē╩Š─┐ś╦(bi©Īo)Ą─╠žš„ĪŻī”(du©¼)ė┌ČÓ─┐ś╦(bi©Īo)Ą─ŪķørŽ┬Ż¼╬ęéāąĶę¬▀\(y©┤n)ė├ą┼─ŅŠžĻćB(t)Ż¼ŲõĖ„┴ąė╔ą┼─ŅŽ“┴┐Bij(t)╦∙ĮM│╔ĪŻę“┤╦Ż¼Ž“┴┐▒Ē╩Š─┐ś╦(bi©Īo)j─▄▒╗tĢr(sh©¬)┐╠Ą─i╦∙┤_Č©Ą─Ė┼┬╩ĪŻ
4Ż«1 ČÓ─┐ś╦(bi©Īo)Ė·█Ö(öĄ(sh©┤)ō■(j©┤)ĻP(gu©Īn)┬ō(li©ón))
DMTIMČÓ─┐ś╦(bi©Īo)Ė·█Ö(öĄ(sh©┤)ō■(j©┤)ĻP(gu©Īn)┬ō(li©ón))─ŻēKĄ─▌ö│÷╔µ╝░ĄĮ╗ņ║ŽŠžĻćĪóĀŅæB(t©żi)╣└ėŗ(j©¼)ųĄ║═▒ŠĄžą┼Žó╚²š▀Ą─ėŗ(j©¼)╦ŃĪŻ
╩ūŽ╚ąĶę¬Ū¾Ą├╗ņ║ŽŠžĻćĪŻ╝┘įO(sh©©)į┌ė^£y(c©©)ĘČć·ā╚(n©©i)ėąKéĆ(g©©)─┐ś╦(bi©Īo)Š▀ėąKéĆ(g©©)╠žš„Ż¼ę“┤╦╠žš„╣▄└ĒęŌ╬Čų°ī”(du©¼)ČÓ─┐ś╦(bi©Īo)Ą─╠žš„▀M(j©¼n)ąąŲź┼õĪŻī”(du©¼)┤╦Ż¼▀\(y©┤n)ė├Identi ty-Mass-FlowĄ─ĘĮĘ©ĪŻ╗ņ║ŽŠžĻć╩Ūę╗éĆ(g©©)KxKŠžĻćŻ¼Ųõį¬╦žMij(t)▒Ē╩Š─┐ś╦(bi©Īo)iį┌t-1Ģr(sh©¬)┐╠ūā│╔─┐ś╦(bi©Īo)jĄ─Ė┼┬╩ĪŻČ°MCMCDA─▄ē“į┌ČÓĒŚ(xi©żng)╩ĮĢr(sh©¬)ķgŽ┬ī”(du©¼)╗ņ║ŽŠžĻć▀M(j©¼n)ąąėąą¦Ąž╣└╦ŃĪŻ
╚╗║¾ąĶę¬ī”(du©¼)ĀŅæB(t©żi)╣└ėŗ(j©¼)ųĄ▀M(j©¼n)ąąėŗ(j©¼)╦ŃĪŻ╚ń╔Ž╦∙╩÷Ż¼MCMCDA─▄ē“?q©▒)”╬┤ų¬ö?sh©┤)┴┐Ą─ČÓ─┐ś╦(bi©Īo)▀M(j©¼n)ąąĖ·█ÖŻ¼▓óŪę─▄ē“?q©▒)Ź¼F(xi©żn)▄ē█EĄ─░l(f©Ī)╔·┼cĮKų╣ĪŻį┌├┐ę╗éĆ(g©©)▓╔śėĢr(sh©¬)ķgČ╬Ż¼Ųõ£y(c©©)┴┐ųĄ┼cŪ░ę╗Č╬Ą─£y(c©©)┴┐ųĄŽÓ»B╝ėŻ¼Å─Č°śŗ(g©░u)įņ│÷£y(c©©)┴┐ųĄ╝»║ŽYĪŻMCMCDA─▄Ū¾│÷Ż¼ŲõųĄĮėĮ³ČÓ─┐ś╦(bi©Īo)Ė·█ÖĄ─MAP╣└ėŗ(j©¼)ųĄŻ¼ęį╝░ųą╦∙ėą▄ē█EĄ─ĀŅæB(t©żi)╣└ėŗ(j©¼)ųĄĪŻī”(du©¼)ė┌├┐ę╗éĆ(g©©)▄ē█Eτ∈ωŻ¼īó╦³┼cų«Ū░░l(f©Ī)¼F(xi©żn)Ą──┐ś╦(bi©Īo)▄ē█E▀M(j©¼n)ąą▒╚▌^ĪŻ╚ń╣¹τ┼cų«Ū░─┐ś╦(bi©Īo)▄ē█EĄ─£y(c©©)┴┐ųĄ¤o╚╬║╬ŽÓ═¼ų«╠ÄŻ¼─Ū├┤╬ęéāšJ(r©©n)Č©Ųõ×ķą┬─┐ś╦(bi©Īo)ĪŻ╚╗║¾Ż¼«ö(d©Īng)Ū░é„ĖąŲ„τī”(du©¼)ė┌ī”(du©¼)ŽÓÓÅé„ĖąŲ„▀M(j©¼n)ąąįāå¢Ż¼╚ń╣¹ŽÓÓÅé„ĖąŲ„ī”(du©¼)τęčų¬Ż¼─Ū├┤╦³Ą─╠žš„īó▒╗Å═(f©┤)ųŲĄĮ«ö(d©Īng)Ū░é„ĖąŲ„«ö(d©Īng)ųąĪŻĘ±ätŻ¼īóī”(du©¼)τäō(chu©żng)Į©ą┬Ą─╠žš„ĪŻūŅ║¾Ż¼«ö(d©Īng)▄ē█EĮY(ji©”)╩°Ģr(sh©¬)Ż¼ī”(du©¼)─┐ś╦(bi©Īo)╠žš„▀M(j©¼n)ąąäh│²ĪŻį┌Ą┌4Ż«2╣Ø(ji©”)Ż¼īóī”(du©¼)─┐ś╦(bi©Īo)öĄ(sh©┤)┴┐ūā╗»ŪķørŽ┬ą┼╚╬ŠžĻć╚ń║╬īŹ(sh©¬)¼F(xi©żn)╦óą┬▀M(j©¼n)ąą├Ķ╩÷ĪŻ
ūŅ║¾ėŗ(j©¼)╦Ń▒Ē╩Š×ķą┼╚╬Ž“┴┐Ą─ą╬╩ĮĄ─▒ŠĄžą┼ŽóĪŻMCMCDAĘĮĘ©─▄ē“═©▀^ūŅą┬Ą─Ż¼ęį╝░ų«Ū░Ą─£y(c©©)┴┐ųĄėąą¦Ąžėŗ(j©¼)╦Ń│÷▒ŠĄžą┼ŽóĪŻ«ö(d©Īng)─┐ś╦(bi©Īo)║═▄ē█EĄ─öĄ(sh©┤)┴┐╠Äė┌╣└ėŗ(j©¼)ųĄĄ─ŪķørŽ┬Ż¼▒ŠĄžą┼Žó─▄ē“▒╗═¼Ģr(sh©¬)ėŗ(j©¼)╦Ń│÷üĒĪŻī”(du©¼)ė┌╠žš„ųĄkŻ¼Č©┴xNjk×ķĢr(sh©¬)ķg³c(di©Żn)éĆ(g©©)öĄ(sh©┤)Ż¼Ą┌jéĆ(g©©)ūŅą┬ė^£y(c©©)ųĄ┼cų«Ū░Ą─ė^£y(c©©)ųĄ║Ž▓óŻ¼ė^£y(c©©)ųĄį┌ų«Ū░Ą─nbiéĆ(g©©)▓╔śėųĄųąė╔k▒Ēš„Ż¼Ųõųąnbi×ķų«Ū░Ą─▓╔śėųĄöĄ(sh©┤)┴┐ĪŻ╦ŃĘ©ĮY(ji©”)╩°Ģr(sh©¬)ī”(du©¼)╠žš„ųĄkėŗ(j©¼)╦ŃĪŻ╚╗║¾Ė∙ō■(j©┤)ūŅą┬Ą─ė^£y(c©©)ųĄüĒī”(du©¼)Ž“┴┐▀M(j©¼n)ąąš{(di©żo)š¹Ż¼▀M(j©¼n)Č°═©▀^γküĒą╬│╔▒ŠĄžą┼ŽóĪŻ
4Ż«2 ╠žš„╣▄└Ē
╠žš„╣▄└Ē─ŻēK░³└©ą┼╚╬ŠžĻć╦óą┬║═▒ŠĄžą┼ŽóĻP(gu©Īn)┬ō(li©ón)Ż¼Č°ČÓ─┐ś╦(bi©Īo)Ė·█Ö(öĄ(sh©┤)ō■(j©┤)ĻP(gu©Īn)┬ō(li©ón))Ą─╗ņ║ŽŠžĻć║═▒ŠĄžą┼Žó▒╗ė├üĒ╦óą┬ą┼╚╬ŠžĻćĪŻ
ą┼╚╬ŠžĻć╦óą┬─ŻēK░³║¼┤µā”(ch©│)į┌KxKą┼╚╬ŠžĻćB(t)ųąĄ─╠žš„ą┼ŽóĪŻą┼╚╬ŠžĻćĄ─╦óą┬╚ńŽ┬Ż║
B(t)=B(t-1)M(t) (6)
┐╔ęį┐┤│÷Ż¼╣½╩Į(6)╩╣ą┼╚╬ŠžĻćąąĪó┴ąų«║═▒Ż│ų▓╗ūāĪŻ╚╗Č°─┐ś╦(bi©Īo)öĄ(sh©┤)┴┐Ą─ūā╗»╩╣įōĘĮĘ©▓╗▀mė├ė┌Ęų▓╝╩Į╠žš„╣▄└ĒĪŻöĄ(sh©┤)┴┐Ą─ūā╗»ėąā╔ĘNŪķą╬Ż║─┐ś╦(bi©Īo)ļxķ_║═▀M(j©¼n)╚╦ė^£y(c©©)ģ^(q©▒)ė“ĪŻ─┐ś╦(bi©Īo)ļxķ_Ż¼ī”(du©¼)é„ĖąŲ„ųą╗ņ║ŽŠžĻćĄ─ŽÓæ¬(y©®ng)┴ą▀M(j©¼n)ąąäh│²Ż╗─┐ś╦(bi©Īo)▀M(j©¼n)╚ļŻ¼ėųėąā╔ĘNŪķą╬Ż║1)─┐ś╦(bi©Īo)Å─ŽÓÓÅé„ĖąŲ„ģ^(q©▒)ė“▀M(j©¼n)╚ļŻ¼2)─┐ś╦(bi©Īo)Å─╬┤ų¬ģ^(q©▒)ė“▀M(j©¼n)╚ļĪŻ
Č°▒ŠĄžą┼Žó▒╗▀\(y©┤n)ė├üĒĮĄĄ═ė╔ŽŃ▐r(n©«ng)ą┼Žó╦∙Ą├Ą─ą┼╚╬ŠžĻćĄ─▓╗┤_Č©ąįĪŻLxKą┼╚╬ŠžĻćĄ─ŽŃ▐r(n©«ng)ą┼ŽóČ©┴x╚ńŽ┬Ż║
ĪĪĪĪ

ĮėŽ┬üĒĄ─å¢Ņ}╩Ūīóįōą┼ŽóĻP(gu©Īn)┬ō(li©ón)ĄĮą┼╚╬ŠžĻćĪŻą┼╚╬ŠžĻćŠ▀ėą╚ńŽ┬ąį┘|(zh©¼)Ż║Ė„┴ąų«║═Ą╚ė┌1Ż╗Ė„ąąų«║¾▒Ż│ų▓╗ūāŻ╗Ė„┴ąų«║═Ą─║═┼cĖ„┴ąų«║═Ą─║═ŽÓĄ╚ĪŻ╚ń╣¹īó─│┴ą╠µōQ×ķ▒ŠĄžą┼ŽóŻ¼īó¤oĘ©▒ŻūCęį╔Žąį┘|(zh©¼)ĪŻ«ö(d©Īng)ŪęāH«ö(d©Īng)▒ŠĄžą┼Žó─▄ē“ĮĄĄ═ą┼╚╬ŠžĻćĄ─▓╗┤_Č©ąįĢr(sh©¬)▓┼─▄┼cą┼╚╬ŠžĻć▀M(j©¼n)ąąĻP(gu©Īn)┬ō(li©ón)ĪŻ
4Ż«3 ą┼Žó╚┌║Ž
DMTIM╦ŃĘ©═©▀^ą┼Žó╚┌║ŽüĒėŗ(j©¼)╦Ń▒ŠĄžé„ĖąŲ„ŠW(w©Żng)Įj(lu©░)Ą─╚½Šųą┼ŽóŻ¼Š▀¾w░³└©üĒūį▓╗═¼é„ĖąŲ„Ą─ĀŅæB(t©żi)╣└ėŗ(j©¼)ųĄ║═╠žš„ą┼╚╬Ž“┴┐Ą─╚┌║ŽĪŻ
╠žš„ą┼Žó(ą┼╚╬Ž“┴┐)Ą─╚┌║Ž─▄ē“▒╗▒Ē╩÷×ķūŅā×(y©Łu)╗»Ą─å¢Ņ}ĪŻ3éĆ(g©©)▓╗═¼Ą─│╔▒Š║»öĄ(sh©┤)Ż¼ŽŃ▐r(n©«ng)ą┼Žó(Shannon information)Ż¼ŪąĀ¢┬ÕĘ“ą┼Žó(Chemo ff information)Ż¼ęį╝░╚R▓╝└šŠÓļx(Kullbaek-Leibler distances)ų«║═┤·▒Ē┴╦▓╗═¼Ą─ąį─▄ųĖś╦(bi©Īo)ĪŻ▒Š╬─ł÷(ch©Żng)Š░ųą╦∙ėąĄ─é„ĖąŲ„Č╝ģó┼cģf(xi©”)═¼╣żū„Ż¼ę“┤╦╬ęéā▓╔ė├ŽŃ▐r(n©«ng)ą┼ŽóĄ─ĘĮĘ©ĪŻ
ĪĪĪĪ╝┘įO(sh©©)▒ŠĄžé„ĖąŲ„╠ß╣®┴╦ā╔éĆ(g©©)ą┼╚╬Ž“┴┐Ż¼ ĪŻŽŃ▐r(n©«ng)ą┼ŽóĘ©ė├ėŗ(j©¼)╦Ńā╔éĆ(g©©)ą┼╚╬Ž“┴┐Ą─═╣║»öĄ(sh©┤)Ą─ĘĮĘ©Ū¾Ą├ę╗éĆ(g©©)╚┌║Žą┼╚╬Ž“┴┐Ż║
ĪŻŽŃ▐r(n©«ng)ą┼ŽóĘ©ė├ėŗ(j©¼)╦Ńā╔éĆ(g©©)ą┼╚╬Ž“┴┐Ą─═╣║»öĄ(sh©┤)Ą─ĘĮĘ©Ū¾Ą├ę╗éĆ(g©©)╚┌║Žą┼╚╬Ž“┴┐Ż║
į┌▀@ą®ŪķørŽ┬Ż¼ėŗ(j©¼)╦Ń│÷Ą─╚┌║Žą┼╚╬Ž“┴┐╩Ūę╗éĆ(g©©)▓╗┤_Č©Ą─ą┼╚╬Ž“┴┐ĪŻ
Ķbė┌├┐éĆ(g©©)─┐ś╦(bi©Īo)┐╔─▄Š▀ėąüĒūį▓╗═¼é„ĖąŲ„Ą─ČÓųž▄ē█EŻ¼▀\(y©┤n)ė├▄ē█EöĄ(sh©┤)ō■(j©┤)╚┌║ŽĘĮĘ©üĒī”(du©¼)ČÓųžĄ─▄ē█E▀M(j©¼n)ąą║Ž▓óĪŻįO(sh©©)ωi×ķüĒūįé„ĖąŲ„iĄ─▄ē█EŻ¼NBi×ķ░³└©i▓ó┼ciŽÓÓÅĄ─ę╗ŽĄ┴ąé„ĖąŲ„ĪŻįO(sh©©)Y’={τk(t)Ż║τk∈ωjŻ¼1≤t≤TŻ¼1≤k≤ω|ωj|Ż¼j∈NBi}×ķ╦∙ėą┤_Č©─┐ś╦(bi©Īo)Ą─ę╗ŽĄ┴ąė^£y(c©©)ĮY(ji©”)╣¹ĪŻ═©▀^ųž»Bė^£y(c©©)ģ^(q©▒)ė“Ż¼┐╔ęįė╔Y’Ą├ĄĮę╗ŽĄ┴ą║Ž▓óė^£y(c©©)ĮY(ji©”)╣¹YĪŻė┌╩ŪĄ├ĄĮę╗ŽĄ┴ąą┬Ą─▄ē█EωinitĪŻ╚╗║¾ī”(du©¼)ę╗ŽĄ┴ą║Ž▓óė^£y(c©©)ĮY(ji©”)╣¹▀\(y©┤n)ąą╦ŃĘ©Ż¼ęįĄ├│÷▒ŠĄžĘĆ(w©¦n)Č©Ą─Ė·█Ö▄ē█EŻ¼Ųõ│§╩╝ĀŅæB(t©żi)×ķωinitĪŻ
5 Ę┬šµĮY(ji©”)╣¹
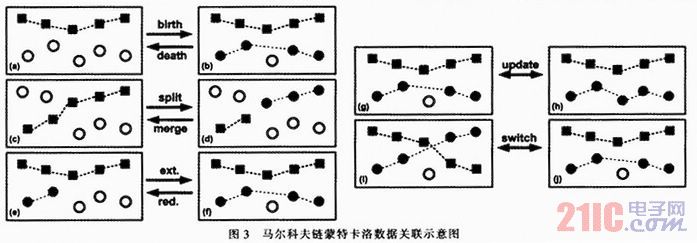
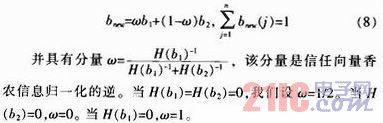
į┌įō╣Ø(ji©”)ųąŻ¼╠ß╣®ę╗éĆ(g©©)║å(ji©Żn)å╬Ą─ł÷(ch©Żng)Š░üĒšf├„DMTIM╦ŃĘ©Ą─ąį─▄ĪŻŁh(hu©ón)Š│ųąėąā╔éĆ(g©©)╣╠Č©é„ĖąŲ„--┐šųąĮ╗═©╣▄ųŲ└ū▀_(d©ó)Ż¼į┌Č■ŠS┐šķgųąī”(du©¼)ČÓ╝▄’wÖC(j©®)▀M(j©¼n)ąąĖ·█ÖĪŻ╝┘Č©├┐éĆ(g©©)é„ĖąŲ„ė^£y(c©©)ĘČć·Ą─░ļÅĮ×ķ10 kmŻ¼▓óŪę«ö(d©Īng)ā╔é„ĖąŲ„ŠÓļx▀M(j©¼n)╚ļ20 kmĄ─═©ą┼ĘČć·Ż¼╦³éāų«ķg┐╔ęįīŹ(sh©¬)¼F(xi©żn)ŽÓ╗ź═©ą┼ĪŻįōł÷(ch©Żng)Š░ųą░³║¼3╝▄’wÖC(j©®)Ż¼╚ńłD4╦∙╩ŠĪŻ▒╗ś╦(bi©Īo)ūó×ķA║═BĄ─’wÖC(j©®)╩ūŽ╚▒╗ŅA(y©┤)ūóāį(c©©)Ż¼▒╗ś╦(bi©Īo)ūó×ķĄ─’wÖC(j©®)ī”(du©¼)ė┌╠žš„╣▄└ĒŽĄĮy(t©»ng)╩Ū╬┤ų¬Ą─ĪŻū¾é╚(c©©)é„ĖąŲ„▒╗é„ĖąŲ„1╦∙ś╦(bi©Īo)ūóŻ¼ėęé╚(c©©)é„ĖąŲ„▒╗é„ĖąŲ„2╦∙ś╦(bi©Īo)ūóĪŻ├┐éĆ(g©©)é„ĖąŲ„ųąĄ─ČÓ─┐ś╦(bi©Īo)Ė·█Ö─ŻēKī”(du©¼)─┐ś╦(bi©Īo)Ą─öĄ(sh©┤)┴┐▀M(j©¼n)ąą╣└╦ŃŻ¼▓óŪęī”(du©¼)├┐éĆ(g©©)ęčų¬─┐ś╦(bi©Īo)Ą─▄ē█E▀M(j©¼n)ąą╣└╦ŃĪŻį┌łD5ųąŻ¼─┐ś╦(bi©Īo)öĄ(sh©┤)┴┐Ė─ūāĄ─╩┬╝■▒╗┤╣ų▒Ą─³c(di©Żn)ŠĆ╦∙ś╦(bi©Īo)ūóĪŻį┌Ģr(sh©¬)┐╠1Ż¼é„ĖąŲ„1Ėąų¬ĄĮ─┐ś╦(bi©Īo)1Ż¼▓óŪęŲõą┼╚╬Ž“┴┐×ķ╩Ū─┐ś╦(bi©Īo)k─▄ē“▒╗é„ĖąŲ„i╦∙Ėąų¬▓óś╦(bi©Īo)Č©×ķjĄ─Ė┼┬╩Ż╗═¼Ģr(sh©¬)é„ĖąŲ„2Ėąų¬ĄĮ╦³Ą──┐ś╦(bi©Īo)1Ż¼▓óŪęŲõą┼╚╬Ž“┴┐×ķĪŻį┌Ģr(sh©¬)┐╠9Ż¼é„ĖąŲ„1░l(f©Ī)¼F(xi©żn)ą┬─┐ś╦(bi©Īo)(é„ĖąŲ„1Ą──┐ś╦(bi©Īo)2)Ż¼▓ó┘xėĶą┬ųĄXĪŻ═¼Ģr(sh©¬)Ż¼é„ĖąŲ„2Ėąų¬ĄĮą┬─┐ś╦(bi©Īo)(é„ĖąŲ„2Ą──┐ś╦(bi©Īo)2)Ż¼įō─┐ś╦(bi©Īo)Ą─╠žš„ųĄ║═ĀŅæB(t©żi)╣└ėŗ(j©¼)ą┼ŽóÅ─é„ĖąŲ„1▐D(zhu©Żn)ęŲ▀^üĒĪŻęį┤╦ŅÉ═ŲŻ¼į┌Ģr(sh©¬)┐╠30Ż¼é„ĖąŲ„2Ą──┐ś╦(bi©Īo)2ļxķ_┴╦é„ĖąŲ„2Ą─ė^£y(c©©)ĘČć·Ż¼Ųõą┼ŽóļSÖC(j©®)Å─é„ĖąŲ„2äh│²ĪŻ
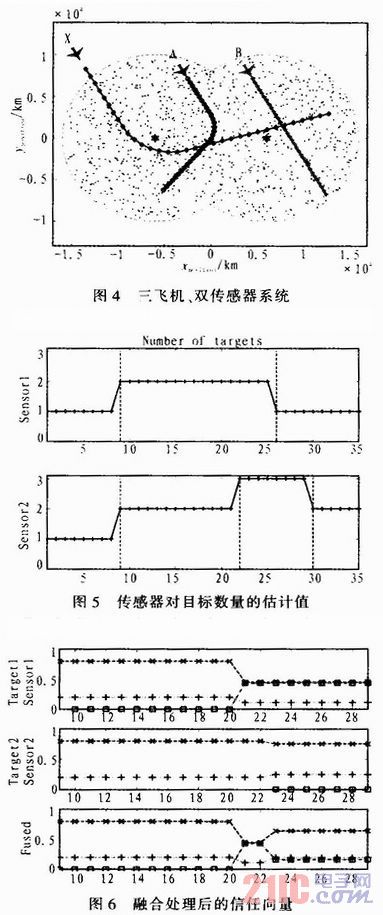
ą┼Žó╚┌║Ž─▄ē“ĮĄĄ═─┐ś╦(bi©Īo)Į╗▓µ▀\(y©┤n)äė(d©░ng)╦∙«a(ch©Żn)╔·Ą─▓╗┤_Č©ąįĪŻĶbė┌ŽŃ▐r(n©«ng)ą┼Žóą¦┬╩Ą─ā×(y©Łu)įĮąįŻ¼į┌įōįć“×(y©żn)ųą╬ęéā▀\(y©┤n)ė├┴╦įōĘĮĘ©üĒīŹ(sh©¬)¼F(xi©żn)ą┼ŽóĄ─╚┌║ŽĪŻłD6╦∙╩Š×ķ╚┌║ŽĄ─ą┼╚╬Ž“┴┐Ż¼łD7×ķīŹ(sh©¬)¼F(xi©żn)ĀŅæB(t©żi)╣└ėŗ(j©¼)╚┌║Ž║¾Ė„é„ĖąŲ„╦∙╣└╦ŃĄ─▄ē█EĪŻ

6 ĮY(ji©”)šō
╣Pš▀ų„ę¬ī”(du©¼)é„ĖąŲ„ŠW(w©Żng)Įj(lu©░)Ž┬ČÓ─┐ś╦(bi©Īo)Ą─Ė·█Ö║═╠žš„╣▄└ĒĘĮĘ©▀M(j©¼n)ąą┴╦蹊┐ĪŻöĄ(sh©┤)ō■(j©┤)ĻP(gu©Īn)┬ō(li©ón)║═ČÓ─┐ś╦(bi©Īo)Ė·█ÖĄ─å¢Ņ}─▄ē“ė╔±RĀ¢┐ŲĘ“µ£├╔╠ž┐©┬ÕöĄ(sh©┤)ō■(j©┤)ĻP(gu©Īn)┬ō(li©ón)╦ŃĘ©ėąą¦ĄžĮŌøQŻ¼įō╦ŃĘ©─▄ē“?q©▒)”ö?sh©┤)┴┐╬┤ų¬ŪęöĄ(sh©┤)┴┐ļSĢr(sh©¬)ķgūā╗»Ą─ČÓ─┐ś╦(bi©Īo)▀M(j©¼n)ąąĖ·█ÖĪŻ╬─ųą▀Ćųv╩÷┴╦ę╗éĆ(g©©)┐╔öU(ku©░)š╣Ą─Ęų▓╝╩ĮČÓ─┐ś╦(bi©Īo)Ė·█Ö║═╔ĒĘ▌╣▄└Ē(DMTIM)╦ŃĘ©Ż¼įō╦ŃĘ©─▄ē“?q©▒)”ČÓ─┐ś?bi©Īo)▀M(j©¼n)ąąĖ·█ÖŻ¼▓óį┌Ęų▓╝╩Įé„ĖąŲ„ŠW(w©Żng)Įj(lu©░)Łh(hu©ón)Š│Ž┬─▄ē“ėąą¦Ąž╣▄└Ē─┐ś╦(bi©Īo)Ą─╠žš„ĪŻDMTIM╦ŃĘ©ė╔öĄ(sh©┤)ō■(j©┤)ĻP(gu©Īn)┬ō(li©ón)Ż¼ČÓ─┐ś╦(bi©Īo)Ė·█ÖŻ¼╠žš„╣▄└ĒŻ¼ęį╝░ą┼Žó╚┌║Ž╦─▓┐Ęų╦∙ĮM│╔ĪŻDMTIM─▄ē“?q©▒)”─│─┐ś?bi©Īo)╠žš„Ą─▒ŠĄžą┼Žó▀M(j©¼n)ąąėąą¦Ąžš¹║ŽŻ¼ęįĮĄĄ═ŽĄĮy(t©»ng)Ą─▓╗┤_Č©ąįŻ¼▓ó═©▀^ą┼Žó╚┌║ŽüĒ▒Ż│ųŽÓÓÅé„ĖąŲ„Ą─▒ŠĄžę╗ų┬ąįĪŻ





