š¬ę¬Ż║ßśī”¼FėąĖ▀╦┘╣½┬Ę╣▄└ĒŽĄĮy¤oĘ©ī”▄ć▌v▀MąąīŹĢr╣▄└ĒĄ─¼FĀŅŻ¼╠ß│÷ę╗ĘNī”Ė▀╦┘╣½┬Ę╔Ž▄ć▌v▀MąąīŹĢr£y╦┘╝░Č©╬╗Ą─ĘĮĘ©ĪŻįōĘĮĘ©╗∙ė┌╔õŅlūRäeŻ©RFIDŻ®╝╝ągŻ¼═©▀^Ęų╬÷śŗĮ©ęŲäė▄ć▌vĄ─Č©╬╗─Żą═Ż¼└¹ė├ūV╣└ėŗĘĮĘ©ī”ŲõČÓŲš└šŅlęŲ▀Mąą£y┴┐Ż¼▓óßśī”─Żą═Ū¾ĮŌųą┤µį┌Ą─ĘŪŠĆąį╠žąįŻ¼▓╔ė├┼ŻŅDĄ³┤·Ę©ėŗ╦Ń▄ć▌vĄ─īŹĢr╦┘Č╚╝░ŽÓī”ū°ś╦ęį▀_ĄĮ£y┴┐▄ć╦┘╝░┤_Č©▄ć▌vīŹĢr╬╗ų├Ą──┐Ą─ĪŻĘ┬šµīŹ“×ĮY╣¹▒Ē├„Ż¼įōĘĮĘ©Š▀ėą▀\╦Ń┴┐ąĪĪóŠ½Č╚Ė▀ĪóīŹ╩®║åå╬Ą─╠ž³cĪŻ
1 Ė┼╩÷
╔õŅlūRäeŻ©Radio Frequency Identification, RFIDŻ®╩Ūę╗ĒŚĘŪĮėė|╩ĮūįäėūRäe╝╝ągŻ¼Š▀ėąą┼Žó┴┐┤¾Īó┐╣Ė╔ö_ÅŖĪó▓┘ū„┐ņĮ▌Ą╚įSČÓā׳cĪŻ╠žäe╩ŪRFID ╝╝ągį┌Ė▀╦┘▀\äė╬’¾wūRäeĪóČÓ─┐ś╦ūRäe║═ĘŪĮėė|ūRäeĄ╚ĘĮ├µĄ─ā×ä▌Ż¼╩╣Ųõį┌║▄ČÓŅIė“Č╝Š▀ėąŠ▐┤¾Ą─░lš╣Øō┴”║═ÅVĘ║Ą─æ¬ė├Ū░Š░ĪŻ

Ė▀╦┘╣½┬Ęū„×ķć°╝ęĄ─ųžę¬æ┬į┘Yį┤Ż¼▓╗āH╠ßĖ▀▀\▌öą¦┬╩Ż¼Č°Ūę▀Ć─▄£p╔┘▄ć▌vōp║─Ż¼Ųõā×įĮąį╩«Ęų═╗│÷ĪŻĄ½į┌░▓╚½ĘĮ├µŻ¼╬ęć°Ą─Ė▀╦┘╣½┬Ęģs▒Ē¼F│÷┴╦▌^Ė▀Ą─╩┬╣╩┬╩║═é¹═÷┬╩ĪŻŽÓĻP蹊┐▒Ē├„Ż¼═©▀^║Ž└Ē┐žųŲÖCäė▄ć▌vĄ─▄ć╦┘╝░░▓╚½▄ćŠÓŻ¼┐╔ęįėąą¦▒ŻšŽĖ▀╦┘╣½┬ĘĄ─Į╗═©░▓╚½║═Ģ│═©Ż¼ŅAĘ└║═£p╔┘Į╗═©╩┬╣╩ĪŻ
Ą½╬ęć°Ė▀╦┘╣½┬Ę╣▄└ĒŽĄĮyųą¼FėąĄ─ę╗ą®Į╗═©Öz£y╝╝ągŻ¼Ųõų„ę¬ū„ė├╩ŪÖz£yĄ└┬Ę┴„┴┐ęį╝░×ķ│¼╦┘┴P┐Ņ╠ß╣®ģó┐╝ę└ō■Ż¼Č°─┐Ū░▒╗═ŲÅVĄ─GPS Č©╬╗ŽĄĮyŻ¼¤oĘ©ī”╦┘Č╚▀MąąīŹĢr£y┴┐Ż¼ŪęŲõČ©╬╗Š½Č╚ėąŽ▐Ż¼ęÓ▓╗─▄īŹĢrĖ·█Ö▄ć▌vĪŻę“┤╦Ż¼╬ęć°į┌Ė▀╦┘╣½┬Ę░▓╚½╣▄└Ē╝░▒O┐ž▀@ę╗ŅIė“▀Ć┤µį┌▌^┤¾Ą─┐š░ūĪŻČÓŲš└šą¦æ¬į┌Į³┤·┐ŲīWųąėąų°ÅVĘ║Ą─æ¬ė├ĪŻ╦³┐╔ė├ė┌£y┴┐’wÖCĢr╦┘Īóė^£y╚╦įņąląŪ▀\ąąŪķørĪó┤_Č©ąŪ¾w▀\ąą╦┘Č╚Īó£y┴┐ęĢŠW─żč¬╣▄ā╚č¬┴„╦┘Č╚Ą╚ĪŻūŅ┤¾ČÓŲš└šŅlęŲ▀Ć╩Ū¤oŠĆ═©ą┼ųąė├ė┌ā×╗»ūį▀mæ¬Įė╩šÖCĄ─ųžę¬ģóöĄŻ¼ī¦Ņlą┼Ą└£y┴┐ĪóŪąōQ┼ąøQ║═╣”┬╩┐žųŲĄ╚ūį▀mæ¬ā×╗»╦ŃĘ©Č╝ę└┘ćė┌ī”╦³Ą─ėąą¦╣└ėŗĪŻ
▒Š╬─╗∙ė┌RFID ╝╝ągŻ¼═©▀^ī”ė╔▄ć▌vęŲäė╦∙«a╔·Ą─ČÓŲš└šŅlęŲ▀MąąīŹĢr╣└ėŗŻ¼╠ß│÷ę╗ĘNĖ▀╦┘╣½┬Ę▄ć▌vīŹĢr£y╦┘╝░Č©╬╗ĘĮĘ©ĪŻ
2 ╦ŃĘ©─Żą═
ĮY║ŽĖ▀╦┘╣½┬ĘĄ─īŹļHŪķørŻ¼▒Š─Żą═▓╔ė├¤oį┤Īóų╗ūx╔õŅl┐©Ż¼ė╔ė┌▒Š╔Ē▓╗ąĶę¬ļŖį┤║═ļŖ│žŻ¼ĮŌøQ┴╦Ė▀╦┘╣½┬ʤoļŖį┤å¢Ņ}ĪŻ═¼ĢrŻ¼¤oį┤╔õŅl┐©▓╗ąĶꬊSūoŻ¼Ūę╩╣ė├ē█├³║▄ķLŻ¼╣Ø╩Ī┴╦┤¾┴┐Ą─╚╦┴”┘Yį┤ĪŻ▄ć▌dķåūxŲ„═©▀^░l╔õ╝ż╗Ņą┼╠¢▓óÅ─¤oį┤æ¬┤Ų„ųąĮė╩š╔õŅlą┼ŽóüĒ┤_Č©«öŪ░╬╗ų├ĪŻ×ķ╚ĪĄ├▌^▀hĄ─Ėąæ¬ŠÓļxŻ¼▄ć▌dķåūxŲ„æ¬╣żū„į┌UHF ŅlČ╬ā╚Ż¼ŲõūRäeŠÓļx┐╔ęį▀_ĄĮ╩«Äū├ūŻ¼ūŃęįØMūŃ«öŪ░Ė▀╦┘╣½┬ĘĄ─įOėŗę¬Ū¾ĪŻ
2.1 ╔õŅl┐©ūRäe┤aįOų├
īó╔õŅl┐©Ą╚ŠÓįOų├į┌Ė▀╦┘╣½┬ĘĄ─Ė¶ļxĦ╗“ū¾Īóėę┬Ę╝ń╠ÄĪŻ├┐éƤoį┤╔õŅl┐©æ¬Š▀ėą╬©ę╗Ą─╔õŅlūRäe┤aŻ¼įō╔õŅlūRäe┤a░³└©Ė▀╦┘╣½┬ĘĄ─ūRäe╠¢┤aĪó▄ćĄ└öĄ─┐ęį╝░┬ĘĦś╦ūRŻ©╝┤▒Ē├„╦∙╠Ä╬╗ų├×ķū¾ėę┬Ę╝ń╗“Ė¶ļxĦŻ®Ż¼▓óę└┤╬įOų├Ēśą“╠¢┤aŻ¼ęį▒Ń─▄ē“▒Ēš„ŲõĄž└Ē╬╗ų├╝░ŽÓæ¬Ēśą“ĪŻ┤╦═ŌŻ¼į┌ID ╠¢┤aųą▀Ć┐╔ęį░³║¼Ė▀╦┘╣½┬ĘĄ─ŽÓæ¬ś╦╠¢ĪóĖ▀╦┘╣½┬ĘĄ─▄ćĄ└öĄ─┐Ą╚ŠÄ┤aĪŻŠ▀¾wįOų├╚ńłD1 ╦∙╩ŠĪŻ
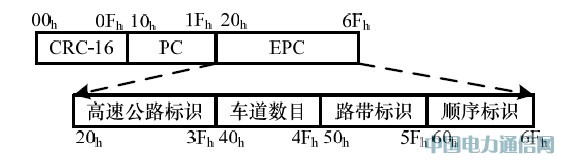
łD1 ╔õŅlś╦ūR┤aįOų├
2.2 öĄīW─Żą═
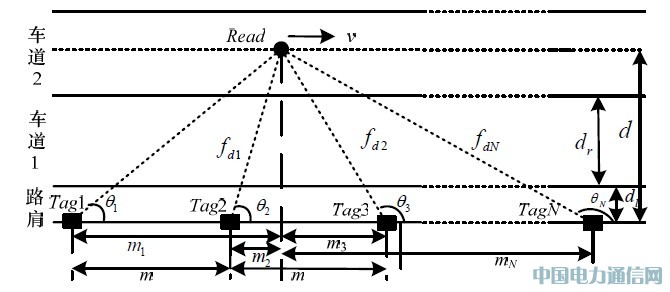
ė╔ė┌Č©Ž“╠ņŠĆ═©ą┼ŠÓļx▀hŻ¼Ė▓╔wĘČć·ąĪŻ¼─┐ś╦├▄Č╚┤¾Ż¼Ņl┬╩└¹ė├┬╩Ė▀Ūę╦∙╩▄Ė╔ö_ąĪŻ¼ę“┤╦īóķåūxŲ„╠ņŠĆįOČ©×ķČ©Ž“╠ņŠĆŻ¼ų╗─▄Įė╩šüĒūį┬Ę╝ń╗“Ė¶ļxĦę╗é╚Ą─╔õŅlą┼╠¢ĪŻłD2 Įo│÷┴╦ķåūxŲ„Įė╩šüĒūį┬Ę╝ńę╗é╚╔õŅl┐©ą┼ŽóĄ──Żą═ĪŻ▄ćĄ└╝░┬Ę╝ńų«ķgė├īŹŠĆĖ¶ķ_Ż¼łAą╬┤·▒Ē▄ć▌dķåūxŲ„Ż¼Šžą╬┤·▒Ēį┌┬Ę╝ńĄ╚ŠÓõüįOĄ─╔õŅl┐©ĪŻįOę╗▄ć▌dķåūxŲ„š²čžų°▄ćĄ└2 š²Ž“ąą±éĪŻ
─│ę╗Ģr┐╠Ż¼Įė╩šĄĮüĒūį╔õŅl┐©1,2,…Ż¼N Ą─ą┼╠¢ĪŻłDųąv ▒Ē╩Š▄ć▌vąą±é╦┘Č╚Ż¼ 1 2 , , , N θ θ ??θ ×ķ▄ć▌vŽÓī”╔õŅl┐©1,2,…Ż¼N Ą─ÅĮŽ“ĘĮŽ“┼c▄ć▌vąą±éĘĮŽ“Ą─ŖAĮŪŻ¼m ×ķā╔╔õŅl┐©ķgĄ─ŠÓļxŻ¼m1,m2,…Ż¼mN ×ķ╔õŅl┐©1,2,…Ż¼N ═¼▄ć▌vąą±éĘĮŽ“Ę©ŠĆķgĄ─ŠÓļxŻ¼d ×ķ▄ć▌vĄĮ╔õŅl┐©┤╣ų▒ŠÓļxŻ¼dr ×ķ▄ćĄ└īÆČ╚Ż¼dl ×ķ┬Ę╝ńīÆČ╚Ż¼ 1 2 d , d , , dN f f ?? f ×ķ▄ć▌vŽÓī”╔õŅl┐©1,2,…Ż¼N Ą─ČÓŲš└šŅlęŲĪŻ
łD2 öĄīW─Żą═
Ė∙ō■Äū║╬ĻPŽĄŻ¼┐╔ęįĄ├ĄĮŻ║

═¼ĢrŻ¼į┌RFID ŽĄĮyųąŻ¼╔õŅl┐©▒Š╔Ē▓╗░l╔õļŖ┤┼▓©Ż¼ų╗ī”üĒūįķåūxŲ„Ą─ļŖ┤┼▓©▀MąąĘ┤╔õĪŻę“┤╦Ż¼Ė∙ō■Įė╩šą┼╠¢ŽÓī”ė┌░l╔õą┼╠¢Ą─ČÓŲš└šŅlŲ½fd ĻPŽĄŻ¼▀Ć┐╔Ą├ĄĮŻ║

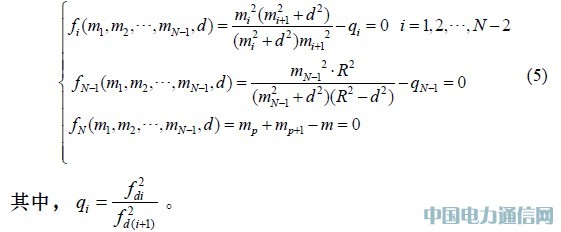
┬ō┴ó╩ĮŻ©1Ż®Īó╩ĮŻ©2Ż®Ż¼┐╔ęįĄ├ĄĮ2N éĆĘĮ│╠Ż¼Č°╬┤ų¬öĄéĆöĄ×ķ2N+2 éĆĪŻīŹļH╔ŽŻ¼«ö2 éĆ╔õŅl┐©╬╗ė┌▄ć▌vąą±éĘĮŽ“Ę©ŠĆā╔é╚ĢrŻ¼ŲõŅlŲ½ųĄ▒ž╚╗×ķę╗š²ę╗žōŻ¼ę“┤╦Ż¼«öÖz£yĄĮ2 éĆś╦ūR┤aŽÓÓÅĄ─╔õŅl┐©p ║═╔õŅl┐©p+1Īófdp ║═fdŻ©p+1Ż®Ę¹╠¢ŽÓĘ┤ĢrŻ¼┐╔ų¬ėąŻ║

┤╦═ŌŻ¼╚¶įOį┌ķåūxŲ„Įė╩šĄĮĄ┌N éĆ╔õŅl┐©Ģrķ_╩╝ł╠ąąČ©╬╗╦ŃĘ©Ż¼ät┐╔Į³╦ŲšJ×ķķåūxŲ„┼c╔õŅl┐©N ų«ķgĄ─ŠÓļx×ķūŅ┤¾═©ą┼ŠÓļxR,ėąŻ║

┬ō┴ó╩ĮŻ©1Ż®Īó╩ĮŻ©2Ż®Ż¼ät┐╔Ū¾Ą├▄ć▌vąą±é╦┘Č╚ęį╝░┼cN éĆ╔õŅl┐©Ą─ŽÓī”╬╗ų├Ż¼▀MČ°īŹ¼Fī”▄ć▌v«öŪ░╬╗ų├Ą─£yČ©ĪŻį┌ęčų¬┴┐ųąŻ¼mĪóR ╩ŪŽĄĮyįOČ©Ą─Ż¼Č°N éĆfd ųĄätąĶę¬▀MąąīŹĢr╣└ėŗĪŻę“┤╦Ż¼ī”fd ╣└ėŗĄ─£╩┤_│╠Č╚╩ŪīŹ¼FŠ½┤_Č©╬╗Ą─ĻPµIĪŻ
ĪĪĪĪ3 ČÓŲš└šŅlęŲfd Ą─╣└ėŗ
Į³─ĻüĒŻ¼ęčėąČÓĘNfd ╣└ėŗ╦ŃĘ©▒╗╠ß│÷Ż¼╚ńį┌Ģrė“ųą└¹ė├ļŖŲĮ═©▀^┬╩▀Mąąų▒Įė£y┴┐[3]Īó╗“▓╔ė├ĢrŅlĘų╬÷ĘĮĘ©[4]Īó╗“└¹ė├ę╗ą®╠ž╩Ōąį┘|╚ńOFDM ī¦Ņlą┼╠¢üĒ╣└ėŗūŅ┤¾ČÓŲš└šŅlęŲ[5].
▀@ą®ĘĮĘ©ę¬├┤£y┴┐Š½Č╚▀^Ą═Ż¼ę¬├┤▀\╦Ń┴┐▀^┤¾Ż¼Š∙▓╗▀m║Žį┌RFID ŽĄĮyųąæ¬ė├ĪŻ▒Š╬─ĮY║ŽRFID ŽĄĮy╠ž³cŻ¼▓╔ė├╣”┬╩ūV╣└ėŗĄ─ĘĮĘ©Ż¼į┌Ņlė“īŹ¼Fī”fd Ą─╣└ėŗĪŻ
ė╔ė┌į┌▄ć▌vęŲäė▀^│╠ųąŻ¼▄ć▌dķåūxŲ„┼cś╦║×ų«ķgĄ─ŽÓī”╬╗ų├╩Ū▓╗öÓūā╗»Ą─Ż¼ę“┤╦Ģrė“▓╔śė³cöĄæ¬▒M┴┐╔┘Ż¼ęį▒ŻūCfdųĄĄ─ŽÓī”ĘĆČ©ĪŻ¼F┤·ūV╣└ėŗĘĮĘ©į┌Č╠öĄō■ėøõøĄ─ŪķørŽ┬Ż¼Ųõąį─▄▀h▀hā×ė┌ĮøĄõūV╣└ėŗĘĮĘ©ĪŻŲõųąŻ¼Burg ╦ŃĘ©▓╗ąĶę¬╣└ėŗūįŽÓĻP║»öĄŻ¼Š▀ėą▌^Ė▀Ą─ūV╣└ėŗ┘|┴┐Ūęėŗ╦Ń▓╗╠½Å═ļsŻ¼╩Ū▌^×ķ═©ė├Ą─ĘĮĘ©Ż¼ęÓ▀m║Žį┌RFID ŽĄĮyųą╩╣ė├ĪŻ
ī”īóĮė╩šą┼╠¢▀MąąŽ┬ūāŅl▓óĄ╚ķgĖ¶Ģrė“▓╔śėŻ¼Ą├ĄĮą┼╠¢ą“┴ąxŻ©1Ż®Ż¼ xŻ©2Ż®Ż¼……, xŻ©nŻ® .▓╔ė├Burg ╦ŃĘ©▀MąąūV╣└ėŗŻ¼▓ó└¹ė├Ę┤╔õŽĄöĄ╣½╩ĮųąĄ─▀f═ŲĻPŽĄ£pąĪ▀\╦Ń┴┐Ż¼═¼Ģr╩╣ė├ą┼Žóšō£╩ätĘ©┼ąČ©AR ─Żą═ļAöĄP.
╦ŃĘ©╗∙▒Š▓Į¾E×ķŻ║
Ż©1Ż®įOČ©│§╩╝Śl╝■ĪŻ┴ŅĄ┌0 ļAŪ░Ž“Īó║¾Ž“ŅA£yš`▓Ņą“┴ą×ķĢrė“▓╔śėą“┴ąĪŻ
Ż©2Ż®įOČ©ļAöĄm=1,ätĄ├ĄĮĘ┤╔õŽĄöĄk1 Īó─Żą═ģóöĄa1Ż©1Ż®╝░ūŅąĪŅA£yš`▓Ņ╣”┬╩ρ1 .
Ż©3Ż®ė╔Ę┤╔õŽĄöĄk 1 Ą├ĄĮĄ┌ę╗ļAŪ░Īó║¾Ž“ŅA£yš`▓Ņą“┴ą e1 f Ż©nŻ®Ż¼e1 b Ż©nŻ®ĪŻ
Ż©4Ż®┴Ņm = m+1,▓╔ė├▀f═ŲĘų─ĖDENmŪ¾│÷įōļAĘ┤╔õŽĄöĄkm ╝░ūŅąĪŅA£yš`▓Ņ╣”┬╩ĪŻ
Ż©5Ż®▓╔ė├ą┼Žóšō£╩ätĘ©┼ąČ©ļAöĄP.┴ŅAICm = N lnŻ©ρmŻ® +2m ,ŲõųąŻ¼N×ķöĄō■xŻ©nŻ® Ą─ķLČ╚ĪŻ«öļA┤╬mė╔1į÷╝ėĢrŻ¼AICmæ¬į┌─│ę╗m ╠Ä▀_ĄĮūŅąĪųĄĪŻę“┤╦Ż¼ ╚¶£yĄ├į┌m ļAėą1 AICm
Ż©6Ż®ėŗ╦Ńm ļAŪ░Īó║¾Ž“ŅA£yš`▓Ņą“┴ą emfŻ©nŻ® ĪóembŻ©nŻ® ╝░╦∙ėą─Żą═ģóöĄam Ż©iŻ®Ż¼ i = 1,2,……,m,ĘĄ╗žŻ©4Ż®ĪŻ
Ż©7Ż®«öAICm ≥AIC m-1 ĢrŻ¼šf├„m-1 ╝┤×ķAR ─Żą═Ą─š²┤_ļA┤╬Ż¼ų┴┤╦Ż¼ęčŪ¾│÷╦∙ėąļA┤╬ĢrĄ─AR ģóöĄŻ¼┐╔ī”AR ─Żą═Ą─╣”┬╩ūV▀Mąą╣└ėŗĪŻ
Ż©8Ż®Ą├ĄĮ╣”┬╩ūV║¾Ż¼šęĄĮŲõĘ∙ųĄūŅ┤¾ųĄ╦∙ī”æ¬Ą─Ņl┬╩ųĄŻ¼╝┤×ķfd ųĄŻ¼╦ŃĘ©ĮY╩°ĪŻ
╦ŃĘ©┴„│╠╚ńłD3 ╦∙╩ŠĪŻ

łD3 Burg ╦ŃĘ©┴„│╠
4 ╦ŃĘ©Ū¾ĮŌ
4.1 ┼ŻŅDĄ³┤·Ę©
īó╩ĮŻ©1Ż®~╩ĮŻ©4Ż®┬ō┴ó▓ó╗»║åŻ¼┐╔Ą├ĄĮ╚ńŽ┬ĘĮ│╠Ż║
īó╩ĮŻ©5Ż®īæ│╔ŠžĻćą╬╩ĮŻ║

▓╔ė├┼ŻŅDĄ³┤·Ę©Ż¼įOęčĄ├ĄĮĄ┌k ┤╬Į³╦ŲĮŌXk,ät┐╔Ą├Ż║
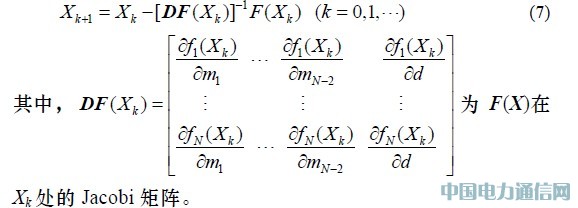
╩ĮŻ©7Ż®╝┤×ķ╩ĮŻ©6Ż®Ą─┼ŻŅDĄ³┤·╣½╩ĮŻ¼▓╔ė├Gauss-Jordan ĘĮĘ©Ū¾ĮŌJacobi ŠžĻćDFŻ©XkŻ®Ą──µŻ¼ät┐╔Ū¾Ą├X,┤_Č©▄ć▌vĄ─īŹĢr╬╗ų├ĪŻį┘īóĮY╣¹┤·╚ļ╩ĮŻ©5Ż®Ż¼╝┤┐╔Ą├ĄĮ▄ć▌v╦┘Č╚v.
4.2 │§ųĄįOČ©
ė╔ė┌┼ŻŅDĄ³┤·Ę©╩ŪŠų▓┐╩šö┐Ą─Ż¼ę“┤╦▀xČ©Ą─│§ųĄę¬ĮėĮ³ĘĮ│╠Ą─ĮŌŻ¼Ę±ätėą┐╔─▄Ą├▓╗ĄĮ╩šö┐Ą─ĮY╣¹ĪŻę“┤╦Ż¼║Ž└ĒĄž▀x╚Ī│§ųĄŻ¼▓╗āH─▄┤_▒ŻŪ¾ĮŌ▀^│╠▓╗░l╔óŻ¼Č°Ūę▀Ć─▄£p╔┘Ą³┤·┤╬öĄŻ¼▀MČ°£p╔┘╦ŃĘ©▀\╦Ń┴┐ĪŻ
Ė∙ō■╩ĮŻ©3Ż®┐╔ų¬Ż¼ŽÓÓÅ╔õŅl┐©pĪóp+1 Ęųäeį┌▄ć▌dķåūxŲ„ąą±éĘĮŽ“Ą─Ę©ŠĆā╔é╚ĪŻę“┤╦Ż¼┐╔įOŻ║

ę└┤╬┐╔įOŻ║

┤╦═ŌŻ¼ė╔łD2 ▀Ć┐╔ų¬2dr + dl > d > dl .
5 Ę┬šµīŹ“×
Ę┬šµ─Żą═ęŖłD2,įO┬Ę╝ńīÆČ╚dl=2 m,▄ćĄ└īÆČ╚dr=5 m,├┐2 éĆ╔õŅl┐©ų«ķgŠÓļxm=5 m,RFID ŽĄĮy╣żū„Ņl┬╩f=915 MHz,ķåūxŲ„║═╔õŅl┐©Ą─ūŅ┤¾═©ą┼ŠÓļxR=14 m,▓╔śėŅl┬╩fs=1 600 Hz,▓╔śė³cöĄN=128.┐╝æ]ĄĮĖ▀╦┘╣½┬ĘŁhŠ│▌^×ķ┐šĢńŻ¼║÷┬įČÓÅĮĖ╔ö_Ą─ė░ĒæŻ¼Ą½ė╔ė┌ķåūxŲ„Ą─Įė╩šą┼╠¢╩«Ęų╬ó╚§Ż¼ę“┤╦Ė╔ö_įļ┬Ģī”Ųõė░Ēæ▌^┤¾Ż¼įOų├ą┼įļ▒╚SNB=-5 dBĪŻ
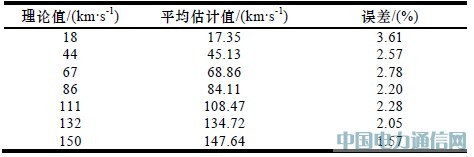
ßśī”▓╗═¼ČÓŲš└šŅlęŲļSÖCīŹ“×500 ┤╬Ż¼ŲõĮY╣¹╚ń▒Ē1 ╦∙╩ŠŻ©Ž▐ė┌Ų¬Ę∙Ż¼▀x╚Ī▓┐ĘųöĄō■┴_┴ąŻ®ĪŻ┐╔ęį┐┤│÷Ż¼▒Š╬─╦∙▓╔ė├Ą─ūV╣└ėŗĘĮĘ©Š▀ėą▌^Ė▀Ą─╣└ėŗŠ½Č╚Ż¼š`▓Ņį┌0.8 Hz ęįŽ┬Ż¼ŪęļSų°fd ųĄ▓╗öÓį÷┤¾Ż¼š`▓ŅųĄ│╩£pąĪĄ─┌ģä▌ĪŻ
ĘųäeįOČ©v ×ķ30 km/hĪó60 km/hĪó90 km/hĪó120 km/hĪó150 km/h,ßśī”▓╗═¼╬╗ų├ī”▄ć▌v╦┘Č╚▀MąąĘ┤Å═£y┴┐Ż¼ŲõŲĮŠ∙š`▓Ņ╚ń▒Ē2 ╦∙╩ŠĪŻ«ö▄ć▌vĮėĮ³ņoų╣ĢrŻ¼ė╔ė┌▓╗┤µį┌ČÓŲš└šŅlęŲ╗“ČÓŲš└šŅlęŲ╩«Ęų╬óąĪŻ¼ė╔ŽĄĮyįOČ©v=0.ļSų°▄ć▌vęŲäė╦┘Č╚Ą─╠ßĖ▀Ż¼ė╔ė┌ČÓŲš└šŅlęŲį┌ŖAĮŪę╗Č©Ą─ŪķørŽ┬═¼╦┘Č╚│╩š²▒╚Ż¼ę“┤╦╦┘Č╚š`▓ŅĢ■ļSų°fd £y┴┐š`▓ŅĄ─£pąĪ┬į│╩Ž┬ĮĄ┌ģä▌ĪŻ
łD4 Įo│÷┴╦400 ┤╬Č©╬╗ĮY╣¹š`▓ŅĘų▓╝ĪŻ┐╔ęį┐┤ĄĮŻ¼╣سc╬╗ų├š`▓Ņ╗∙▒Š╔Žį┌0.3 m ų«ā╚Ż¼ŲĮŠ∙š`▓Ņ×ķ0.1 m ū¾ėęĪŻ
▒Ē1 fd ╣└ėŗųĄ╝░š`▓Ņ Hz.
▒Ē2 ╦┘Č╚ŲĮŠ∙╣└ėŗųĄ╝░š`▓Ņ
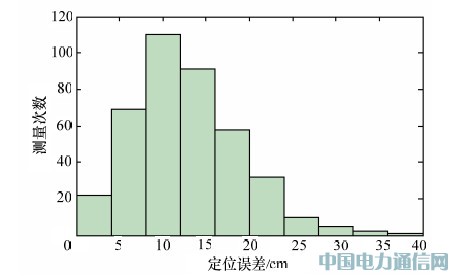
łD4 Č©╬╗ĮY╣¹š`▓ŅĘų▓╝
6 ĮY╩°šZ
▒Š╬─ßśī”╬ęć°¼FėąĖ▀╦┘╣½┬Ę╣▄└ĒŽĄĮy¤oĘ©ī”▄ć▌v▀MąąīŹĢr╣▄└Ē▀@ę╗¼FĀŅŻ¼╠ß│÷ę╗ĘNī”Ė▀╦┘╣½┬Ę╔Ž▄ć▌v▀MąąīŹĢr£y╦┘╝░Č©╬╗Ą─ĘĮĘ©ĪŻįōĘĮĘ©Š▀ėą▀\╦Ń┴┐ąĪĪóŠ½Č╚Ė▀ĪóīŹ╩®║åå╬Ą─╠ž³cŻ¼┐╔ė├ė┌īŹ¼FĖ▀╦┘╣½┬Ę╔Žī”▄ć▌vĄ─īŹĢrĖ·█Ö▒O┐žĪŻ▒Š╬─āH╩ŪīóRFID ╝╝ągæ¬ė├ė┌Ė▀╦┘╣½┬Ę£y╦┘╝░Č©╬╗ĘĮŽ“Ą─ę╗éĆ║åå╬ćLįćĪŻ╚ń║╬ĮY║ŽīŹļHŪķørŻ¼śŗĮ©╣”─▄═Ļ╔ŲĄ─£y╦┘╝░Č©╬╗ŽĄĮyŻ¼▓óį┌īŹļHŁhŠ│ųą╝ėęįæ¬ė├īó╩Ū▀Mę╗▓ĮĄ─蹊┐ĘĮŽ“ĪŻ┤╦═ŌŻ¼įōĘĮĘ©▀Ć┐╔ęį═ŲÅVĄĮÖCł÷ĶF┬ĘĪó╣żśI┴„╦«ŠĆ╝░┘É▄ć┼▄Ą└Ą╚ČÓéĆŅIė“Ż¼Š▀ėą▌^×ķÅVķ¤Ą─æ¬ė├Ū░Š░ĪŻ





