š¬ę¬Ż║×ķĮŌøQ¼FZ-StackČ©╬╗│╠ą“┤·┤a┴┐┤¾Ż¼ĮYśŗÅ═ļsĄ╚å¢Ņ}Ż¼╠ß│÷ę╗ĘN╗∙ė┌TInyOSĄ─CC2430Č©╬╗ĘĮ░ĖĪŻį┌Ęų╬÷TinyOSĮM╝■╝▄śŗ╗∙ĄA╔ŽŻ¼įOėŗīŹ¼F├ż╣سcĪóÕ^╣سc┼cģRŠ█╣سcķgĄ─¤oŠĆ═©ą┼ęį╝░ģRŠ█╣سc┼cPCÖCĄ─┤«┐┌═©ą┼ĪŻį┌┤╦╗∙ĄA╔ŽīŹ¼FPCī”Ė„Õ^╣سcRSSIŻ©Received Signal Strength IndicatorŻ®╝─┤µŲ„ųĄĄ─š²┤_ūx╚ĪŻ¼┤_Č©īŹ“×╩ęŁhŠ│Ž┬ī”Į╠-│ŻæB¤oŠĆé„▓ź─Żą═Ą─Š▀¾wģóöĄŻ¼▓ó▓╔ė├┘|ą─╦ŃĘ©üĒ╠ßĖ▀Č©╬╗Š½Č╚ĪŻīŹ“×’@╩ŠŻ¼į┌ė╔╦─éĆÕ^╣سcĮM│╔Ą─4.8x3.6m2Šžą╬Č©╬╗ģ^ė“ųąŻ¼═©▀^RSSI┘|ą─Č©╬╗╦ŃĘ©Ū¾Ą├Ą─├ż╣سcū°ś╦×ķŻ©2.483 1,1.018 5Ż®Ż¼īŹļHū°ś╦×ķŻ©2.40,1.20Ż®Ż¼š`▓Ņ×ķ0.199 6 m,▒Ē├„▌^║├ĄžīŹ¼Fī”├ż╣سcĄ─Č©╬╗ĪŻ
¤oŠĆé„ĖąŲ„ŠWĮj╩Ūė╔Ęų▓╝į┌ĮoČ©ģ^ė“ā╚┤¾┴┐é„ĖąŲ„╣سcęį¤oŠĆūįĮM┐ŚČÓ╠°Ą─═©ą┼ĘĮ╩Įśŗ│╔Ą─ŠWĮjŽĄĮyŻ¼─┐Ū░į┌ŁhŠ│▒O£y▒ŻūoĪóśŪėŅ▒O┐žĪó╝ę═ź░▓Ę└Īóßt»¤ūo└ĒĪó─┐ś╦Ė·█ÖĪó▄Ŗ╩┬Ą╚ŅIė“ęč½@Ą├┴╦ÅVĘ║Ą─æ¬ė├ĪŻ
1 CC2430ąŠŲ¼ĮķĮB
CC2430ąŠŲ¼╩ŪTI/Chipcon╣½╦Š╔·«aĄ─šµš²ęŌ┴x╔ŽĄ─Ų¼╔ŽŽĄĮyŻ©SOCŻ®╝ēĮŌøQĘĮ░ĖŻ¼╦³╝»į÷ÅŖą═╣żśIś╦£╩8051║╦ą─Īóā׹ѥ─╔õŅląŠŲ¼CC24 20ĪóÅŖ┤¾Ą─═Ōć·┘Yį┤ė┌ę╗¾wĪŻ╝»│╔Ą─═ŌįO┘Yį┤ų„ę¬ėąDMAĪóČ©Ģr/ėŗöĄŲ„Īó┐┤ķT╣ĘČ©ĢrŲ„ĪóAES-128ģf╠Ä└ĒŲ„Īó8═©Ą└8~14╬╗ADCĪóUSARTĪóą▌├▀─Ż╩ĮČ©ĢrŲ„ĪóÅ═╬╗ļŖ┬Ę╝░21éĆ┐╔ŠÄ│╠I/O,ų¦│ųIEEE802.15.4║═ZigBeeģfūhĪŻ
CC2430ąŠŲ¼Š▀ėąąį─▄Ė▀Īó╣”║─Ą═ĪóĮė╩šņ`├¶Č╚Ė▀Īó┐╣Ė╔ö_ąįÅŖĪóė▓╝■CSMA/CAų¦│ųĪóöĄūų╗»RSSI/LQIų¦│ųĪóDMAų¦│ųĄ╚╠ž³cŻ¼ų¦│ų¤oŠĆöĄō■é„▌ö┬╩Ė▀▀_250 kbps.
ĪĪĪĪ2 TinyOSŽĄĮy┼cnesCšZčį
ė╔ė┌¤oŠĆé„ĖąŲ„ŠWĮjĄ─╠ž╩ŌąįŻ¼ąĶę¬▓┘ū„ŽĄĮy─▄ē“Ė▀ą¦Ąž╩╣ė├é„ĖąŲ„╣سcĄ─ėąŽ▐ā╚┤µĪóĄ═╣”║─╠Ä└ĒŲ„ĪóČÓśėé„ĖąŲ„ĪóėąŽ▐Ą─ļŖį┤Ż¼▓óŪę─▄ī”Ė„ĘN╠žČ©æ¬ė├╠ß╣®ūŅ┤¾Ą─ų¦│ųĪŻ
╗∙ė┌┤╦Ż¼UC Berkeley蹊┐╚╦åTīŻ×ķŪČ╚ļ╩Į¤oŠĆé„ĖąŲ„ŠWĮjķ_░l│÷TinyOSŽĄĮyŻ¼─┐Ū░ęčĮø│╔×ķ¤oŠĆé„ĖąŲ„ŠWĮjŅIė“╩┬īŹ╔ŽĄ─ś╦£╩ŲĮ┼_ĪŻ TinyOSŽĄĮyŠ▀ėąĮM╝■╗»ŠÄ│╠Īó╩┬╝■“īäė─Ż╩ĮĪó▌p┴┐╝ēŠĆ│╠╝╝ągĪóų„äėŽ¹Žó═©ą┼╝╝ągĄ╚╠ž³cĪŻTinyOS▓╔ė├ĮM╝■╝▄śŗĘĮ╩ĮŻ¼┐ņ╦┘īŹ¼FĖ„ĘNæ¬ė├Ż¼ĮM╝■░³└©ŠWĮjģfūhĪóĘų▓╝╩ĮĘ■äšĪóé„ĖąŲ„“īäėęį╝░öĄō■½@╚Ī╣żŠ▀Ą╚Ż¼ę╗éĆ═Ļš¹Ą─æ¬ė├ŽĄĮy═©▀^ĮM║Ž▓╗═¼Ą─ĮM╝■üĒīŹ¼FĪŻ▓╔ė├╩┬╝■“īäėĄ─▀\ąą─Żą═Ż¼┐╔ęį╠Ä└ĒĖ▀▓ó░ląįĄ─╩┬╝■Ż¼▓óīŹ¼F╣Ø─▄ĪŻ
TinyOSæ¬ė├│╠ą“═©│Żė╔Ēöīė┼õ╝■Īó║╦ą─╠Ä└Ē─ŻēK║═Ųõ╦³ĮM╝■śŗ│╔ĪŻ├┐éĆæ¬ė├│╠ą“ėąŪęāHėąę╗éĆĒöīė┼õ╝■Ż¼ĮM╝■ķg═©▀^Įė┐┌▀Mąą▀BĮė═©ą┼Ż¼Ž┬īėĮM╝■╠ß╣®Įė┐┌Ż¼═©▀^provideinterface interfaceNameüĒ┬Ģ├„Ż¼╔ŽīėĮM╝■╩╣ė├Įė┐┌Ż¼═©▀^useinterface interfaceNameüĒ┬Ģ├„ĪŻĮė┐┌╠ß╣®ā╔ŅÉ║»öĄŻ¼Ęųäe╩Ū├³┴ŅŻ©commandŻ®║»öĄ┼c╩┬╝■Ż©eventŻ®║»öĄŻ¼╔ŽīėĮM╝■Ž“Ž┬īėĮM╝■░l│÷├³┴ŅŻ¼åóäėŽ┬īėĮM╝■Ą─╣”─▄Ż║Ž┬īėĮM╝■═Ļ│╔ŽÓæ¬Ą─╣”─▄║¾Ž“╔ŽīėĮM╝■ł¾Ėµ╩┬╝■ĪŻæ¬ė├│╠ą“┐é¾w┐“╝▄╚ńłD1╦∙╩ŠĪŻ
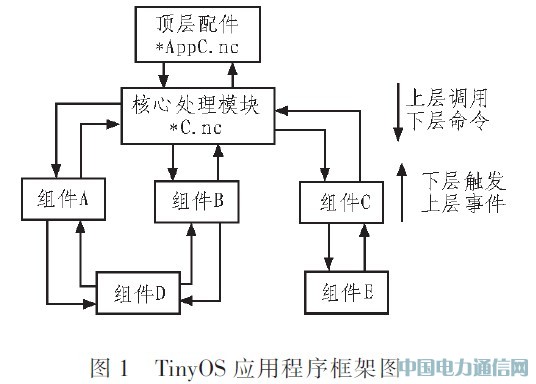
TinyOSŽĄĮy▒Š╔Ēęį╝░æ¬ė├│╠ą“Č╝╩Ū▓╔ė├nesCšZčįŠÄīæŻ¼nesCšZčį╩Ūī”CšZčįĄ─öUš╣Ż¼Š▀ėąŅÉ╦Ųė┌CšZčįĄ─šZĘ©Ż¼Ą½ų¦│ųTinyOSĄ─▓ó░l─Żą═Ż¼═¼ĢrŠ▀ėąĮM╝■╗»ÖCųŲŻ¼─▄ē“┼cŲõ╦¹ĮM╝■▀BĮėį┌ę╗ŲÅ─Č°ą╬│╔ę╗éƶö░¶ąį║▄║├Ą─ŪČ╚ļ╩ĮŽĄĮyĪŻnesCšZčį░čĮM╝■╗»/─ŻēK╗»Ą─ŠÄ│╠╦╝Žļ║═╗∙ė┌╩┬╝■“īäėĄ─ł╠ąą─Żą═Šo├▄ĮY║ŽŲüĒĪŻæ¬ė├nesCšZčį─▄ē“Ė³┐ņ╦┘ĘĮ▒ŃĄžŠÄīæ╗∙ė┌TinyOSĄ─æ¬ė├│╠ą“ĪŻ
3 RSSIČ©╬╗įŁ└Ē
RSSI╚½ĘQReceived Signal Strength IndicatorŻ©Įė╩šą┼╠¢ÅŖČ╚ųĖ╩ŠŻ®Ż¼╩Ūę╗ĘN╗∙ė┌ŠÓļxĄ─Č©╬╗╦ŃĘ©ĪŻRSSIįŁ└Ē╩Ūęčų¬░l╔õ╣سcĄ─░l╔õą┼╠¢ÅŖČ╚Ż¼Įė╩š╣سcĖ∙ō■Įė╩šą┼╠¢Ą─ÅŖČ╚Ż¼ėŗ╦Ń│÷ą┼╠¢į┌é„▓ź▀^│╠ųąĄ─ōp║─Ż¼└¹ė├└Ēšō║═Įø“×─Żą═īóé„▌öōp║─▐D╗»×ķŠÓļxŻ¼į┘Ė∙ō■Įė╩š╣سcĄ─ęčų¬╬╗ų├└¹ė├╚²▀ģ£y┴┐Ę©ėŗ╦Ń│÷░l╔õ╣سcĄ─╬╗ų├ĪŻė╔ė┌įōĘĮĘ©▓╗ąĶę¬Ņ~═ŌĄ─ė▓╝■įOéõŻ¼╩Ūę╗ĘNĄ═╣”║─┴«ārĄ─£yŠÓ╝╝ągŻ¼ę“┤╦į┌║▄ČÓĒŚ─┐ųąĄ├ĄĮ┴╦ÅVĘ║Ą─æ¬ė├ĪŻ
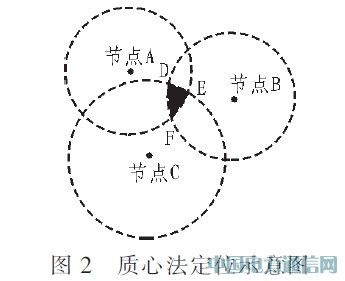
▒Š╬─į┌RSSIČ©╬╗╗∙ĄA╔Ž╩╣ė├┘|ą─╦ŃĘ©╠ßĖ▀Č©╬╗Š½Č╚Ż¼╚ńłD2╦∙╩ŠŻ¼ūŅ║¾Ū¾Ą├Ą─├ż╣سcū°ś╦×ķ³cDĪóE║═FĮM│╔Ą─╚²ĮŪą╬Ą─┘|ą─ĪŻ
ĪĪĪĪ4 Č©╬╗╦ŃĘ©į┌TinyOSųąĄ─īŹ¼F
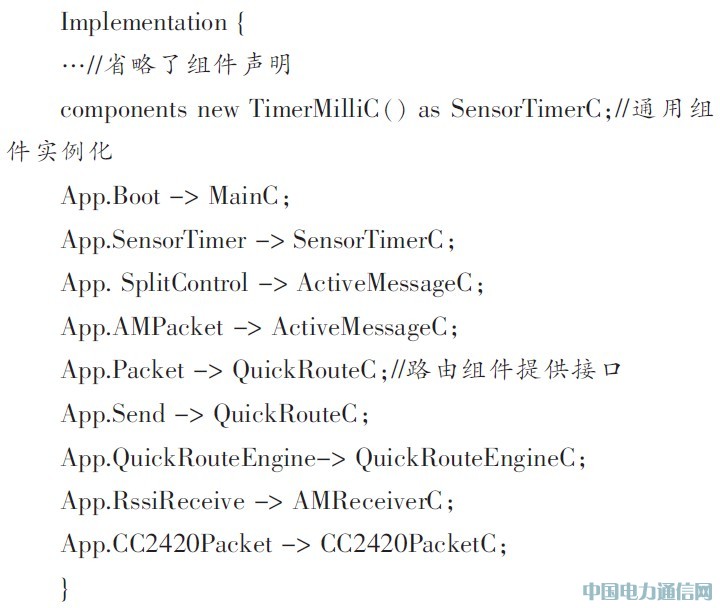
Ė∙ō■RSSI£yŠÓįŁ└ĒŻ¼ę¬┤_Č©├ż╣سcĄ─╬╗ų├Ż¼ų┴╔┘ąĶę¬╚²éĆÕ^╣سcŻ©ęčų¬╬╗ų├Ą─Įė╩š╣سcŻ®Ż¼▓óąĶę¬ę╗éĆģRŠ█╣سcüĒé„▌öĖ„Õ^╣سcĄ─RSSI╝─┤µŲ„ųĄĄĮPCÖCŻ¼ūŅĮK═©▀^┤«┐┌š{įćų·╩ųüĒ’@╩ŠĮY╣¹▓ó▀Mę╗▓ĮČ©╬╗├ż╣سcū°ś╦ĪŻŽ┬├µĘųäeĮķĮBęŲäė├ż╣سcĪóņoæBÕ^╣سcęį╝░ģRŠ█╣سcĄ─īŹ¼F┴„│╠ĪŻ
4.1 ├ż╣سc
├ż╣سcĄ─ų„ę¬╚╬äš╩ŪŽ“╦∙ėąÕ^╣سcÅV▓źą┼ŽóŻ¼Š▀¾wĄ─┴„│╠╚ńłD3╦∙╩ŠĪŻ
ĪĪĪĪTiny OS│╠ą“Ēöīė┼õ╝■ų„¾w╚ńŽ┬Ż║

4.2 ņoæBÕ^╣سc
Õ^╣سcų„ę¬╣”─▄╩ŪĮė╩š├ż╣سcĄ─ÅV▓źą┼ŽóŻ¼╚╗║¾╠ß╚ĪRSSI╝─┤µŲ„ųąĄ─ųĄŻ¼═©▀^┬Ęė╔īė░l╦═Įė┐┌▐D░lĮoģRŠ█╣سcŻ¼╗“▐D░lŲõ╦³Õ^╣سcĄ─öĄō■ĮoģRŠ█╣سcĪŻų„ę¬īŹ¼F┴„│╠╚ńłD4╦∙╩ŠĪŻ
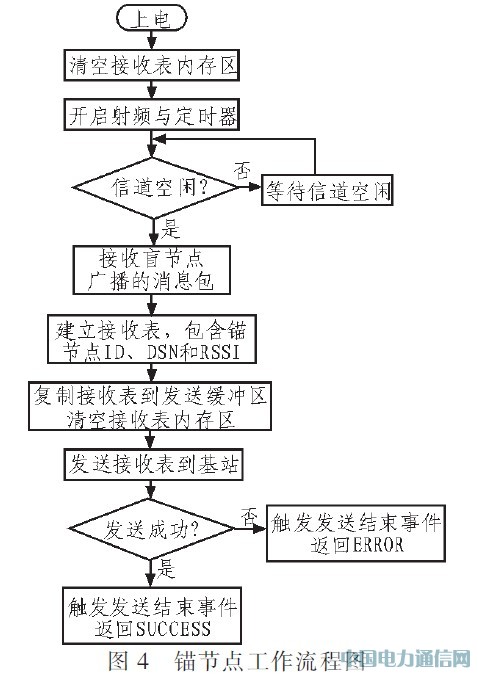
ĪĪĪĪÕ^╣سcĄ─ĮM╝■▀BĮė╚ńŽ┬Ż║
ĪĪĪĪņoæBÕ^╣سc═©▀^CC2420PacketĮė┐┌üĒ½@╚ĪRSSIųĄŻ¼Š▀¾w║»öĄ╚ńŽ┬Ż║
rssi=Ż©Ż©intŻ®call CC2420Paeket.getRssiŻ©msgŻ®Ż®Ż╗
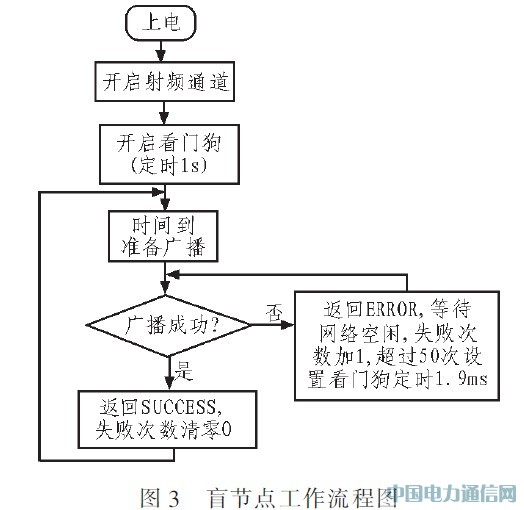
4.3 ģRŠ█╣سc
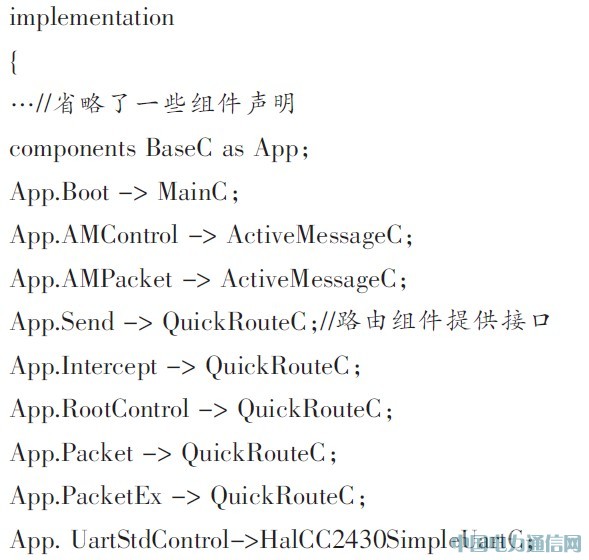
ģRŠ█╣سcŻ¼ę▓ĘQ×ķ╗∙šŠŻ¼ų„꬞ōž¤Įė╩šĖ„Õ^╣سc░l╦═Ą─Įė╩š▒Ēą┼ŽóŻ¼░³└©Õ^╣سcIDĪóDSN║═RSSI,▓óīó▀@ą®öĄō■░³═©▀^┤«┐┌▐D░lĄĮPCÖCĪŻŠ▀¾w┴„│╠╚ńłD5╦∙╩ŠĪŻ
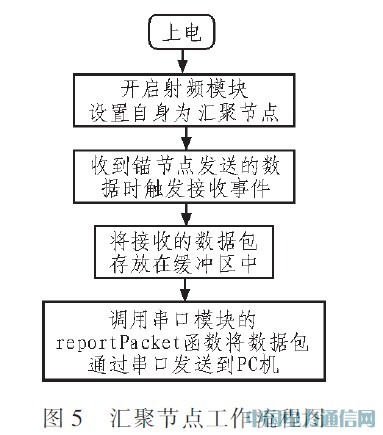
ĪĪĪĪģRŠ█╣سcĮM╝■▀BĮė╚ńŽ┬Ż║

4.4 │╠ą“ęŲų▓┼cīŹ“×ĮY╣¹
▒ŠīŹ“×į┌CygwinŲĮ┼_Ž┬▀MąąŠÄūg┼cęŲų▓Ż¼ŠÄūg▀^│╠╚ńłD6╦∙╩ŠĪŻ

łD6 TinyOSŠÄūg┴„│╠łD
▀M╚ļCygwinŁhŠ│Ż¼ŪąōQĄĮTinyOSČ©╬╗│╠ą“─┐õøŽ┬Ż¼▌ö╚ļŠÄūgęŲų▓├³┴ŅŻ║
make cc2430em install NID=0x GRP=00
ŲõųąNID╩Ū╣سc╠¢Ż¼╩Ū╣سcĄ─╔ĒĘ▌ś╦ūRŻ¼═¼ę╗ŠWĮjųąĄ─╣سc╠¢▒žĒÜ╬®ę╗Ż╗GRP╩ŪŠWĮj╠¢Ż¼═¼ę╗ŠWĮjųą╦∙ėą╣سcĄ─ŠWĮj╠¢▒žĒÜę╗ų┬ĪŻ
į┌╦∙ėą╣سcĄ─TinyOSęŲų▓═Ļ«ģ║¾Ż¼åóäė╦∙ėą╣سcŻ¼æ¬ė├┤«┐┌š{įćų·╩ų’@╩ŠģRŠ█╣سc░l╦═ĄĮPCÖCĄ─RSSIöĄō■Ż¼öĄō■ĮYśŗ╚ńłD7╦∙╩ŠŻ¼Ųõųą1~7éĆūų╣ØöĄō■×ķą┼Žó░³Ą─░³Ņ^Ż¼8~9ā╔ūų╣Ø×ķųą└^Õ^╣سcĄ─╣سc╠¢Ż¼10~11ā╔ūų╣Ø×ķį┤Õ^╣سcĄ─╣سc╠¢Ż¼12~13ūų╣Ø×ķį┤Õ^╣سcĄĮģRŠ█╣سcĄ─╠°öĄŻ¼14~15ūų╣Ø×ķ├ż╣سcĄ─╣سc╠¢Ż¼21~22ā╔ūų╣ØöĄō■×ķÕ^╣سcĄ─RSSIųĄĪŻ
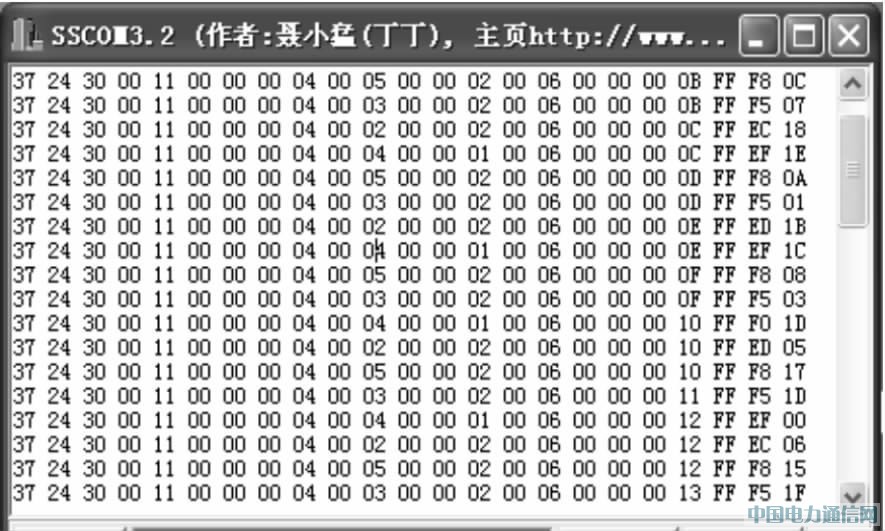
łD7 Õ^╣سcRSSIųĄ
į┌┤_Č©PCÖC─▄ē“š²┤_Įė╩šĖ„Õ^╣سcĄ─RSSIųĄ║¾Ż¼▀ĆąĶę¬▀x╚Ī║Ž▀mĄ─RSSI£yŠÓą┼╠¢╦ź£p─Żą═Ż¼īóRSSIųĄ▐D╗»×ķŠÓļxĪŻ▒ŠīŹ“×ųą▓╔ė├į┌¤oŠĆą┼╠¢é„▌öųąæ¬ė├ÅVĘ║Ą─ī”öĄ--│ŻæB─Żą═Ż¼╚ń╩ĮŻ©1Ż®╦∙╩ŠŻ║
RSSI=-Ż©10n·lgŻ©dŻ®+AŻ®+45 Ż©1Ż®
ŲõųąA×ķ├ż╣سc┼cÕ^╣سcŽÓŠÓ1├ūĢrRSSIĄ─Į^ī”ųĄŻ¼▒ŠīŹ“×ųą£yĄ├A≈40,n×ķ¤oŠĆą┼╠¢é„▓źųĖöĄŻ¼ę╗░Ń╚Ī2~4,Įø▀^ČÓ┤╬įć“×╚Ī3.0▌^×ķ║Ž▀mĪŻīó▒Š─Żą═æ¬ė├į┌╦∙£yĄ├Ą─RSSIųąŻ¼▓óī”▒╚īŹļHŠÓļxĄ├ĄĮ╚ń▒Ē1║═łD8╦∙╩ŠĮY╣¹Ż║▒Ē1ųąd×ķRSSI└Ēšō─Żą═╦∙Ą├ŠÓļxŻ¼D×ķīŹļH£y┴┐ĮY╣¹ĪŻ
▒Ē1 RSSIųĄ┼cŠÓļxĄ─▐DōQ
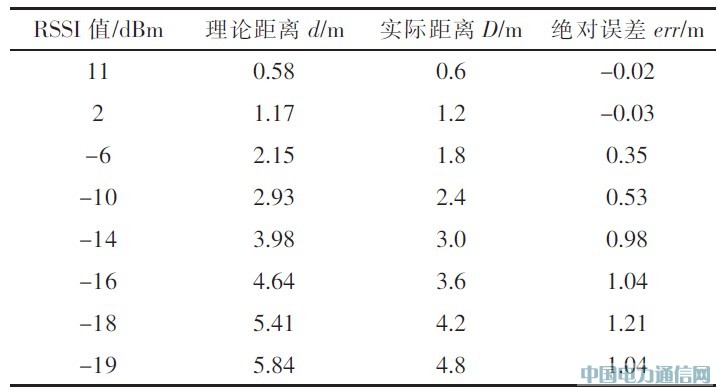
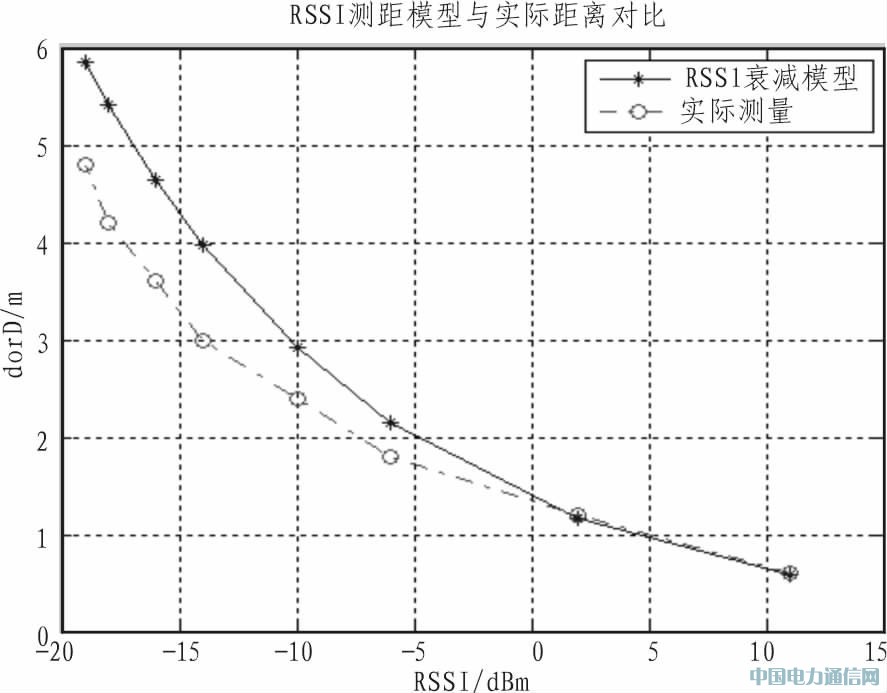
łD8 RSSI£yŠÓ─Żą═“×ūC
į┌īŹ“×╩ęŁhŠ│Ž┬▓╝ų├┴╦4éĆÕ^╣سcĪó1éĆģRŠ█╣سc║═1éĆ├ż╣سcŻ¼4éĆÕ^╣سcĘų▓╝į┌4.8x3.6 m2Šžą╬Ą─4éĆ³cŻ¼├ż╣سc╬╗ė┌Šžą╬ģ^ė“ā╚Ż¼ģRŠ█╣سcį┌Šžą╬ģ^ė“═ŌĪŻ
ūx╚Ī╚ńłD7╦∙╩ŠĄ─Ė„Õ^╣سcRSSIųĄŻ¼į┌MatlabŁhŠ│Ž┬═©▀^ī”öĄ--│ŻæBé„▓ź─Żą═īóRSSIųĄ▐Dūā×ķŠÓļxŻ¼ūŅ║¾═©▀^┘|ą─╦ŃĘ©ī”├ż╣سc▀MąąČ©╬╗Ż¼ėŗ╦Ń│÷├ż╣سcĄ─ū°ś╦ĪŻį┌īŹ“×ųą▓╔ė├10┤╬£y┴┐╚ĪŲĮŠ∙ųĄüĒ£pąĪČ©╬╗š`▓ŅŻ¼▓óėŗ╦Ńī”▒╚├ż╣سc└Ēšōū°ś╦┼cīŹļHū°ś╦Ą─š`▓ŅŻ¼Ą├ĄĮ╚ńłD9╦∙╩ŠĄ─Č©╬╗ĮY╣¹ĪŻ

łD9 RSSIČ©╬╗ĮY╣¹
═©▀^Č©╬╗╦ŃĘ©ėŗ╦Ń│÷Ą─├ż╣سcū°ś╦×ķŻ©2.483 1,1.018 5Ż®Ż¼īŹļH├ż╣سcū°ś╦×ķŻ©2.4,1.2Ż®Ż¼š`▓Ņ×ķ0.199 6 m,╗∙▒ŠīŹ¼F┴╦ī”├ż╣سcĄ─Č©╬╗ĪŻ
5 ĮYšō
▒Š╬─į┌TinyOS▓┘ū„ŽĄĮyŽ┬īŹ¼F┴╦╗∙ė┌CC2430─ŻēKĄ─RSSIČ©╬╗Ż¼Ęų╬÷┴╦├ż╣سcĪóÕ^╣سc║═ģRŠ█╣سcĄ─╣żū„┴„│╠Ż¼┤_Č©┴╦īŹ“×╩ęŚl╝■Ž┬¤oŠĆé„▌ö─Żą═Shadowing─Żą═ģóöĄŻ¼ūŅ║¾└¹ė├Matlabėŗ╦Ń│÷├ż╣سcū°ś╦ĪŻČ©╬╗ĮY╣¹’@╩ŠŻ¼═©▀^Č©╬╗╦ŃĘ©╦∙Ą├Ą─├ż╣سcū°ś╦┼cīŹļHū°ś╦š`▓Ņ×ķ0.199 6 m,┐╔ØMūŃ┤¾ČÓöĄ¤oŠĆé„ĖąŲ„ŠWĮjī”╣سcČ©╬╗Ą─ę¬Ū¾ĪŻ





