ķ_░lĄ═│╔▒ŠĪóąĪą═╗»╚╦─śūRäeŽĄĮyį┌░lš╣īŹļH╚╦─śūRäeæ¬ė├ųąŠ▀ėąųžę¬Ą─ęŌ┴xĪŻ▒ŠŽĄĮy▓╔ė├ARM9ū„×ķŽĄĮy┐žųŲąŠŲ¼Ż¼▀_ĄĮ┴╦ŽĄĮyĄ═│╔▒ŠĪó▒Ńöy╗»ĪóąĪą═╗»Ą─ę¬Ū¾ĪŻ▓╗═¼ė┌▀\ąąį┌PCÖCĄ─╚╦─śūRäe╦ŃĘ©Ż¼ŽĄĮyĄ─ūRäe╦ŃĘ©▒žĒÜĖ³ČÓĄž┐╝æ]╦ŃĘ©Ą─ėŗ╦Ń┴┐║═ARMĄ─▀\ąą╦┘Č╚Ż¼╩╣ūRäe£╩┤_┬╩║═ūRäeĢrķgČ╝▀_ĄĮ┐╔Įė╩▄ĘČć·ĪŻ
1 ė▓╝■ŲĮ┼_
1.1 ARM9╠Ä└ĒŲ„
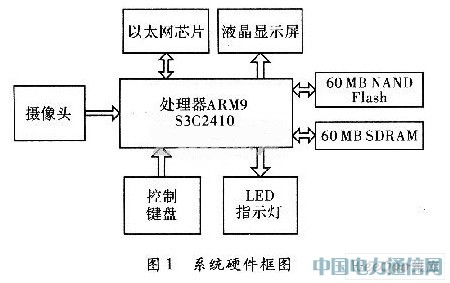
▒ŠŽĄĮy▓╔ė├╚²ąŪ╣½╦ŠĄ─ARM9ŽĄ┴ąS3C2410ū„×ķ╠Ä└ĒŲ„Ż¼╣żū„Ņl┬╩┐╔▀_ĄĮ203 MHzŻ¼┐╔ØMūŃŽĄĮyī”ėŗ╦Ń╦┘Č╚Ą─ę¬Ū¾ĪŻįō╠Ä└ĒŲ„ā╚ų├2éĆUSB HOSTŻ¼▒ŠŽĄĮy┐╔ė├üĒÆņ▌dUSBözŽ±Ņ^ĪŻ
1.2 ę║Š¦’@╩ŠŲ┴
×ķ’@╩ŠözŽ±Ņ^«öŪ░▓╔╝»łDŽ±Ą─ŅAė[Ż¼ŽĄĮy▓╔ė├╚²ąŪĄ─320×240Ž±╦žę║Š¦Ų┴Ż¼┤¾ąĪ×ķ106.68 cmĪŻįōę║Š¦Ų┴Ą─├┐éĆŽ±╦ž╔ŅČ╚×ķ2 bitŻ¼▓╔ė├RGB565╔½▓╩┐šķgĪŻ
1.3 özŽ±Ņ^
özŽ±Ņ^▓╔ė├╩ął÷╔Ž│ŻęŖĄ─ŠWč█2000özŽ±Ņ^Ż¼ā╚▓┐╩Ū║¼CMOSé„ĖąŲ„Ą─OV511+ąŠŲ¼ĪŻ
CMOSé„ĖąŲ„▓╔ė├Ėą╣Ōį¬╝■ū„×ķė░Ž±▓Č½@Ą─╗∙▒Š╩ųČ╬Ż¼║╦ą─╩Ū1éĆĖą╣ŌČ■śO╣▄Ż¼įōČ■śO╣▄į┌Įė╩▄╣ŌŠĆšš╔õų«║¾─▄ē“«a╔·▌ö│÷ļŖ┴„Ż¼Č°ļŖ┴„Ą─ÅŖČ╚ät┼c╣ŌššĄ─ÅŖČ╚ī”æ¬ĪŻŽÓī”CCDłDŽ±é„ĖąŲ„Ż¼CMOSé„ĖąŲ„Š▀ėą│╔▒ŠĄ═┴«Ą─ā׳cĪŻįōözŽ±Ņ^═©▀^USBĮė┐┌┼cARM9╠Ä└ĒŲ„═©ą┼ĪŻįōözŽ±Ņ^▌ö│÷Ė±╩ĮyuvŻ¼į┌▌ö│÷ų┴Ų┴─╗ų«Ū░Ż¼ąĶīóöĄō■Ė±╩Į▐D╗»×ķRGB565Ė±╩ĮĪŻ
1.4 ┤µā”Ų„
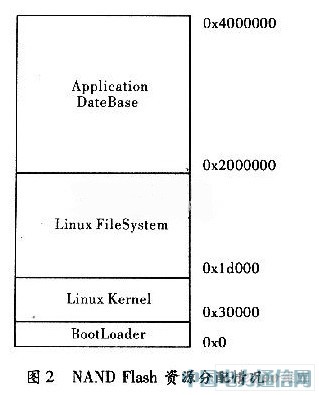
ŽĄĮy▓╔ė├64 MBĄ─SDRAMŻ¼ė╔ā╔Ų¼K4S561632ąŠŲ¼ĮM│╔Ż¼╣żū„į┌32╬╗─Ż╩ĮĪŻ┴Ēėą64 MBĄ─NANDFlashŻ¼▓╔ė├K9F1208ąŠŲ¼ĪŻįōąŠŲ¼į┌ŽĄĮyųą┐šķgĘų┼õŪķørŻ¼╚ńłD2╦∙╩ŠĪŻ
2 ▄ø╝■ŲĮ┼_
ŽĄĮyĄ─▄ø╝■įOėŗų„ę¬ė╔ĄūīėĄ─▓┘ū„ŽĄĮyŻ¼“īäė│╠ą“ęį╝░æ¬ė├│╠ą“ĮM│╔ĪŻ▓┘ū„ŽĄĮy▓╔ė├Linux 2.4ā╚║╦ĪŻ═©▀^ī”ā╚║╦Ą─▀m«ö▓├╝¶Ż¼äh│²ī”▒ŠŽĄĮy▓╗ąĶꬥ─ŽĄĮyĘ■äšęį╝░“īäė│╠ą“ĪŻ
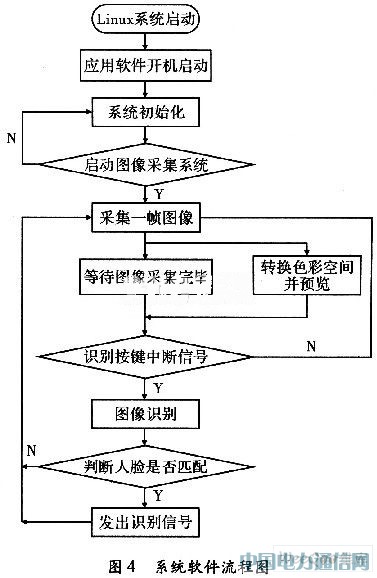
▒ŠŽĄĮyĄ─“īäė│╠ą“ų„ę¬ė├üĒ“īäėözŽ±Ņ^Īó░┤µI║═ųĖ╩Š¤¶ĪŻ▀@3éĆ“īäė│╠ą“į┌▓┘ū„ŽĄĮyåóäė║¾Ż¼▓╔ė├Linux╠žėąĄ─äėæB╝ė▌d─ŻēKĘĮ╩Į╝ė▌dų┴ŽĄĮyā╚║╦ĪŻözŽ±Ņ^“īäė│╠ą“┐╔į┌Linuxā╚║╦ūįĦĄ─OV 51l“īäė│╠ą“╗∙ĄA╔Žą▐Ė─Ż¼╩╣Ųõ╝µ╚▌OV 511+ąŠŲ¼ĪŻųĖ╩Š¤¶“īäė│╠ą“ų„ę¬ė├üĒ╠ß╩Š«öŪ░│╠ą“╣żū„ĀŅæBĪŻė╔ė┌│╠ą“▀\ąąė┌Linux▓┘ū„ŽĄĮyų«╔ŽŻ¼æ¬ė├│╠ą“¤oĘ©ų▒Įė┐žųŲė▓╝■I/O┐┌Ż¼ąĶꬎ╚Įø▀^“īäė│╠ą“ī”╬’└ĒĄžųĘ▀MąąĄžųĘė│╔õŻ¼▓┼┐╔═©▀^ė│╔õĄ─╠ōöMĄžųĘ▀MąąI/O▓┘ū„ĪŻ░┤µI“īäė│╠ą“▓╔╝»ė├æ¶▌ö╚ļŻ¼▓ó═©▀^ė▓╝■ųąöÓé„ų┴Linuxā╚║╦┐šķgŻ¼į┘ė╔“īäė│╠ą“═©▀^Linux▀M│╠ķg═©ą┼ĘĮ╩Įų«ę╗Ą─ą┼╠¢═©ą┼Ż¼é„ų┴▀\ąąį┌Linuxė├æ¶┐šķgĄ─æ¬ė├│╠ą“ĪŻ
3 ūRäe╦ŃĘ©
3.1 PCA╦ŃĘ©
PCAĘĮĘ©(╝┤╠žš„─śĘĮĘ©)╩ŪM.Turk║═A.Pentlandį┌╬─½Iųą╠ß│÷Ą─Ż¼įōĘĮĘ©Ą─╗∙▒Š╦╝Žļ╩ŪŻ║īółDŽ±Ž“┴┐Įø▀^K-LūāōQ║¾ė╔Ė▀ŠSŽ“┴┐▐DōQ×ķĄ═ŠSŽ“┴┐Ż¼▓óą╬│╔Ą═ŠSŠĆąįŽ“┴┐┐šķgŻ¼╝┤╠žš„ūė┐šķgŻ¼╚╗║¾īó╚╦─ś═Čė░ĄĮįōĄ═ŠS┐šķgŻ¼ė├╦∙Ą├ĄĮĄ─═Čė░ŽĄöĄū„×ķūRäeĄ─╠žš„Ž“┴┐ĪŻūRäe╚╦─śĢrŻ¼ų╗ąĶīó┤²ūRäeśė▒ŠĄ─═Čė░ŽĄöĄ┼cöĄō■Äņųą─┐ś╦śė▒Š╝»Ą─═Čė░ŽĄöĄ▀Mąą▒╚ī”Ż¼ęį┤_Č©┼c──ę╗ŅÉūŅĮ³ĪŻ
PCA╦ŃĘ©Ęų×ķā╔▓ĮŻ║║╦ą──śöĄō■Äņ╔·│╔ļAČ╬Ż¼╝┤ė¢ŠÜļAČ╬ęį╝░ūRäeļAČ╬ĪŻ
(1)║╦ą──śöĄō■Äņ╔·│╔ļAČ╬ĪŻ
1)╝┘įO╣▓ėąKÅłM×N┤¾ąĪĄ─╚╦─śłDŽ±ĪŻŽ╚īó├┐ÅłłDŽ±░┤┴ą╗»×ķ(M×N)×1Ą─┴ąŽ“┴┐Ż¼├³├¹×ķxiŻ¼i=1Ż¼2Ż¼…Ż¼KĪŻ

5)ėŗ╦ŃAATĄ─╠žš„Ž“┴┐μiŻ╗Ė∙ō■ėŗ╦Ń┴┐▒Ż┴¶jéĆūŅ┤¾╠žš„Ž“┴┐ĮM│╔╠žš„ūė┐šķgĪŻ
6)īó├┐Åł─śφ(£p╚źŠ∙ųĄ║¾)▒Ē╩Š│╔jéĆ╠žš„Ž“┴┐Ą─ŠĆąįĮM║ŽŻ¼╝┤×ķφĄ─╠žš„─śĪŻ├┐Åłś╦£╩╗»ė¢ŠÜ─śφiė├Ω=(ω1iŻ¼ω2iŻ¼…Ż¼ωji)TŻ¼i=1Ż¼2Ż¼…Ż¼K▒Ē╩ŠĪŻ
(2)ūRäeļAČ╬ĪŻ
1)įOę¬ūRäeĄ─╬┤ų¬╚╦─ś×ķTŻ¼Ž╚īóT░┤┴ąūā╗»×ķę╗┴ąŽ“┴┐xtĪŻ
2)xtŪ¾┼cŲĮŠ∙─śψĄ├▓ŅųĄφĪŻį┘īóφŽ“╠žš„ūė┐šķg═Čė░Ż¼╝┤

3)īóφ▒Ē╩Š│╔

4)ūŅ║¾ėŗ╦Ńā╔éĆŠžĻćĄ─ÜW╩ŽŠÓļx

╚¶er<ξŻ¼Ųõųąξ×ķ╣╠Č©ųĄŻ¼ätįō╚╦─ś▒╗ūRäeĪŻ
3.2 PGA╦ŃĘ©Ą─ŅA╠Ä└Ē
ļm╚╗PcA╦ŃĘ©į┌┤²ūRäełDŽ±┘|┴┐▌^║├Ą─ŪķørŽ┬Ż¼ėąūRäe£╩┤_Ūęėŗ╦Ń┴┐▓╗┤¾Ą─ā׳cŻ¼Ą½į┌ęįŽ┬Äū³cŪķørŽ┬Ż¼┤µį┌╚▒Ž▌ĪŻŲõę╗╩Ū┤²ūRäełDŽ±║═ė¢ŠÜłDŽ±╣ŌššČ╚▓Ņäe▌^┤¾ĪŻŲõČ■╩Ū╚╦─ś▒│Š░▓Ņäe▌^┤¾ĪŻ×ķĖ─▀MPCA╦ŃĘ©Ż¼┐╔ī”łDŽ±ū÷ęįŽ┬ŅA╠Ä└ĒŻ║
(1)äh│²▒│Š░ĪŻę¬äh│²▒│Š░Š═꬚ę│÷╚╦─śį┌łDŽ±Ą─╬╗ų├ĪŻī”┤╦Ż¼▒ŠŽĄĮy═©▀^╚╦─ś─w╔½Į©─ŻĄ─ĘĮĘ©šę│÷╚╦─śĄ─╬╗ų├Ż¼▓ó▀Mę╗▓Įšę│÷č█Š”╬╗ų├Ż¼╚╗║¾Ė∙ō■ā╔éĆč█Š”ų«ķgĄ─ŠÓļxėŗ╦Ń│÷╚╦─ś┤¾Ė┼ĘČć·Ż¼═©▀^ī”╚╦─śĘČć·Ą─▀m«öš{š¹Ż¼╩╣ŲõęÄĖ±╗»ĪŻ
(2)š{š¹├┐Åł╚╦─śłDŽ±Ą─┴┴Č╚ĪŻ═©▀^įOČ©ę╗╣╠Č©ųĄŻ¼š{š¹łDŽ±Ž±╦žĄ─╗ęČ╚ųĄŻ¼╩╣łDŽ±╗ęČ╚ŲĮŠ∙ųĄ▀_ĄĮ▀@ę╗╣╠Č©ųĄĪŻ═©▀^═¼æB×V▓©Ż¼£p╔┘╣Ōšš▓╗Š∙ĪŻ
4 ĮY╩°šZ
▓╔ė├┴╦į┌ARM9┐žųŲŽ┬CMOSłDŽ±é„ĖąŲ„▀MąąłDŽ±▓╔╝»Ż¼▓ó└¹ė├Ė─▀MĄ─PCA╦ŃĘ©ī”łDŽ±ūRäeŻ¼╠ßĖ▀┴╦ūRäeą¦┬╩║═ŽĄĮyĄ─īŹė├ąįĪŻ£yįć▒Ē├„Ż¼─ś▓┐ĘČć·į┌180×200Ž±╦žĢrŻ¼įOČ©ķōųĄer×ķ2×1015Ą─ŪķørŽ┬Ż¼ŽĄĮyĄ─ūRäe┬╩×ķ89.2ŻźĪŻ