1 ę²čį
ė╔ė┌¤oŠĆöĄō■═©ą┼▓╗ė├▓╝ŠĆŻ¼┐ņ╦┘▓╝ŠųŻ¼ę“┤╦Š▀ėąėąŠĆöĄō■═©ą┼¤oĘ©▒╚öMĄ─▒ŃĮ▌ąįŻ¼į┌╠ž╩Ōł÷║ŽŠ▀ėą▓╗┐╔╠µ┤·ąįĪŻ╚╗Č°Ż¼é„ĮyĄ─ė╔╗∙▒Š╔õŅl╝»│╔ļŖ┬Ę┤ŅĮ©Ą─¤oŠĆöĄō■═©ą┼ŽĄĮy┤µį┌ļŖ┬ĘÅ═ļsŻ¼│╔▒ŠĖ▀Ż¼é„▌ö╦┘┬╩Ą═Ż¼┐╔┐┐ąį▓ŅĄ╚╚▒³cĪŻ×ķ┤╦Ż¼Nordic╣½╦Š═Ų│÷ę╗┐Ņ╣żśI╝ēā╚ų├ė▓╝■µ£┬ĘīėģfūhĄ─Ą═│╔▒Šå╬ąŠŲ¼nRF24L01ą═¤oŠĆ╩š░lŲ„╝■ĪŻįōŲ„╝■▓╔ė├GFSKš{ųŲŻ¼128éĆŅl³cūįäė╠°ŅlŻ¼Ų¼ā╚ūįäė╔·│╔ł¾Ņ^║═CRCąŻ“×┤aŻ¼Š▀ėą│÷Õeūįäėųž░l╣”─▄Ż¼▀@ą®╠žąį╩╣Ą├ė╔nRF24L0lśŗĮ©Ą─¤oŠĆöĄō■é„▌öŽĄĮyŠ▀ėą│╔▒ŠĄ═Ż¼╦┘┬╩Ė▀Ż¼é„▌ö┐╔┐┐Ą╚ā׳cĪŻ
2 nRF24L01║åĮķ
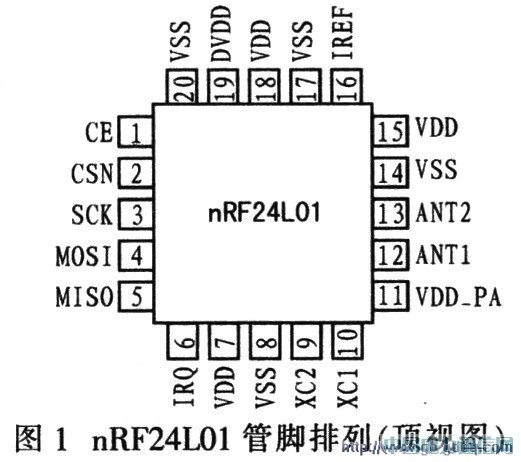
łDlĮo│÷nRF24L0lĄ─ę²─_┼┼┴ąĪŻnRF24L01╣żū„ė┌2.4~2.5 GHz ISMŅlČ╬Ż¼ā╚ų├Ņl┬╩║Ž│╔Ų„Īó╣”┬╩Ę┼┤¾Ų„Ī󊦾wš±╩ÄŲ„Īóš{ųŲŲ„Ą╚╣”─▄─ŻēKŻ¼▓ó╚┌║Ž┴╦Enhanced ShoekBurst╝╝ągĪŻŲõųąŻ¼▌ö│÷╣”┬╩Īó═©ą┼ŅlĄ└Īóūįäėųž░l┤╬öĄĄ╚ģóöĄ┐╔═©▀^ŠÄ│╠įOų├ĪŻā╚ų├Ą─SPIĮė┐┌Ż¼Ųõ╦┘┬╩×ķ0Ī½8Mb/sŻ¼MCU═©▀^SPIĮė┐┌┐žųŲnRF 24L0lĪŻnRF24L01Ą─╠ž³c╚ńŽ┬Ż║ó┘╣”║─Ą═ĪŻ─▄ē“į┌ęįę╗6 dBmĄ─╣”┬╩░l╔õĢrŻ¼╣żū„ļŖ┴„ų╗ėą9 mAŻ╗į┌ęį0 dBmĄ─╣”┬╩░l╔õĢrŻ¼╣żū„ļŖ┴„āH11.3 mAŻ╗Č°į┌Įė╩šĢrŻ¼╣żū„ļŖ┴„āH12.3 mAŻ¼ę“┤╦Š▀ėąĄ¶ļŖ║═┐šķeČÓĘNĄ═╣”┬╩╣żū„─Ż╩ĮĪŻó┌¾wĘeąĪŻ¼▓╔ė├QFN20ĘŌčbĪŻó█╣®ļŖļŖē║×ķ1.9~3.6 VŻ¼┐╔ĘĮ▒Ń╝»│╔ĄĮĖ„ĘNļŖūėŲ„╝■ĪŻ
3 LPC214x║åĮķ
IPC214xŽĄ┴ą╩ŪPhilips╣½╦ŠĄ─╗∙ė┌ARM7ā╚║╦Ą─Ė▀ąį─▄Ų„╝■Ż¼┼cLPC213xŽĄ┴ąŲ„╝■ŽÓ╝µ╚▌Ż¼▓óį÷╝ė┴╦ę╗ą®ą┬╣”─▄Ż¼ąį─▄Ą├ĄĮ┴╦┤¾┤¾Ą─╠ß╔²ĪŻLPC214xŽĄ┴ąŲ„╝■ūŅ┤¾╠ž╔½╩Ūā╚ų├2kBĮKČ╦RAMĄ─USB 2.0╚½╦┘┐žųŲŲ„Ż¼1éĆŻ©LPC2141/42Ż®╗“2éĆŻ©LPC2144/46/48Ż®10╬╗A/D▐DōQŲ„Ż¼ČÓéĆ┤«ąąĮė┐┌Ż¼░³└©2éĆUARTĪó2éĆĖ▀╦┘I2C┐éŠĆĪóSPI║═Š▀ėąŠÅø_ū„ė├╝░┐╔ūāöĄō■ķLČ╚Ą─SSPĪŻLPC214xŽĄ┴ąŲ„╝■▓╔ė├å╬ļŖį┤╣®ļŖŻ¼Š▀ėą╔ŽļŖÅ═╬╗Ż©PORŻ®║═Ą¶ļŖÖz£yŻ©BODŻ®ļŖ┬ĘĪŻŽÓī”ė┌Ųš═©ARM7üĒšfŻ¼LPC214x▀Ć╠ß╔²┴╦I/OČ╦┐┌Ą─╦┘Č╚Ż¼▓óŪęā╚ų├8—40 KBĄ─ņoæBRAM║═32~512 KBĄ─Ė▀╦┘Flash┤µā”Ų„Ż╗╣żū„Ņl┬╩Ė▀▀_60MHzŻ╗▓╔ė├│¼ąĪą═LQFP64ĘŌčbĪŻ
4 ŽĄĮyė▓╝■įOėŗ
įōŽĄĮy▓╔ė├─ŻēK╗»įOėŗŻ¼ų„ę¬ė╔LPC2144ĪónRF24L01Īó╔õŅl╣”Ę┼║═╠ņŠĆ─ŻēKĮM│╔ĪŻŲõųąŻ¼╔õŅl╣”Ę┼▓╔ė├┼_×│Kę╗BEST╣½╦ŠĄ─2.4 GļpŽ“╣”Ę┼─ŻēKĪŻłD2╩ŪŽĄĮy┐é¾wįOėŗłDĪŻ╔Ž╬╗ÖC×ķPCÖCŻ¼LPC2144┼cnRF24L01▀BĮėŻ¼Ė∙ō■ąĶę¬┼õų├2.4 G╣”Ę┼║═į÷ęµ╠ņŠĆ─ŻēKĪŻ╚ń╣¹┼õų├0.5 W╣”Ę┼║═Ė▀į÷ęµ╠ņŠĆŻ¼äté„▌öŠÓļx┐╔▀_5~10 kmĪŻŽ┬╬╗ÖC×ķŪČ╚ļ╩ĮŲĮ┼_Ż¼įōŪČ╚ļ╩ĮŲĮ┼_┐╔ęį╩Ūå╬Ų¼ÖCĪóARMĪóDSP║═FPGAŻ¼nRF24L0l┐╔═©▀^SPIĮė┐┌ų▒Įė┼cŪČ╚ļ╩ĮŲĮ┼_▀BĮėĪŻ

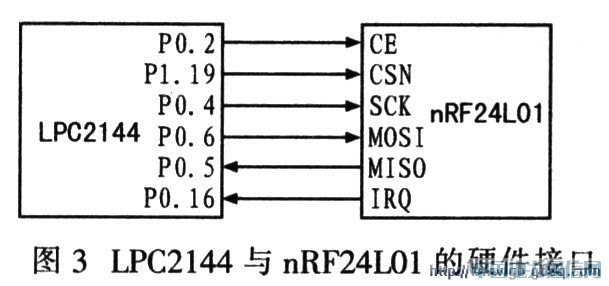
łD3Įo│÷LPC2144┼cnRF24L0lĄ─ė▓╝■Įė┐┌įOėŗĪŻ┼õų├LPC2144Ą─P0.2ĪóP1.19ū„×ķGPIOČ╦┐┌Ęųäe┼cnRF24L0lĄ─CE║═CSN▀BĮėŻ╗┼õų├LPC2144Ą─P0.4ĪóP0.5ĪóP0.6ū„×ķSPIOČ╦┐┌Ęųäe┼cnRF24L0lĄ─SCKĪóMISOĪóMOSI▀BĮėŻ║┼õų├LPC2144Ą─P0.16ū„×ķEINT0Č╦┐┌┼cnRF24L0lĄ─IRQ▀BĮėĪŻ
5 ŽĄĮy▄ø╝■įOėŗ
░l╦═Č╦LPC214x═Ļ│╔│§╩╝╗»║¾Ż¼░čnRF24L01┼õų├│╔PTX╣żū„─Ż╩ĮĪŻ╚¶Å─╔Ž╬╗ÖCĮė╩šĄĮöĄō■Ż¼ätåóäėnRF24L01░l╦═öĄō■ĪŻ╚¶░l╦═│╔╣”Ż¼ät«a╔·TX_DSųąöÓŻ╗╚¶ųž░l│¼Ž▐Ż¼ät«a╔·MAX_RTųąöÓŻ╗╚¶░l╦═│╔╣”Ż¼ät└^└m░l╦═Ż¼Ę±ät▀Mąą│÷Õe╠Ä└ĒĪŻĮė╩šČ╦LPC214x═Ļ│╔│§╩╝╗»║¾Ż¼░čnRF24L0l┼õų├│╔PRX╣żū„─Ż╩ĮĪŻ«öš²┤_Įė╩šöĄō■ĢrŻ¼nRF24L0l«a╔·Įė╩šųąöÓś╦ųŠŻ¼LPC214xÅ─nRF24L01ūx╚ĪöĄō■▓óŽ“Ž┬╬╗ÖC░l╦═ĪŻłD4Įo│÷▄ø╝■┴„│╠łDĪŻ▄ø╝■ķ_░lŁhŠ│×ķADSl.2ĪŻ

5.1 nRF24L01Ą─│§╩╝╗»
nRF24L01═©▀^SPIĮė┐┌║══Ō▓┐┐žųŲŲ„╝■╚ńMCUĪóARMĪóDSP▀MąąöĄō■Į╗ōQŻ¼ŲõSPIģfūh╩ŪMSBį┌Ū░Ż¼LSBį┌║¾ĪŻ╚ń╣¹ę¬ūxīæČÓéĆūų╣ØŻ¼Ž╚ūxīæĄ═ūų╣ØĪŻ╚ń╣¹═Ō▓┐┐žųŲŲ„╝■ø]ėąSPIĮė┐┌Ż¼┐╔ė├Ųš═©I/OĮė┐┌─ŻöMĪŻ▀@└’▀xė├ĦSPIĮė┐┌Ūę┐╔ĘĮ▒ŃĄž┼cnRF24L0l▀BĮėĄ─LPC21440▒ĒlĮo│÷nRF24L0lĄ─├³┴Ņ▒ĒĪŻ
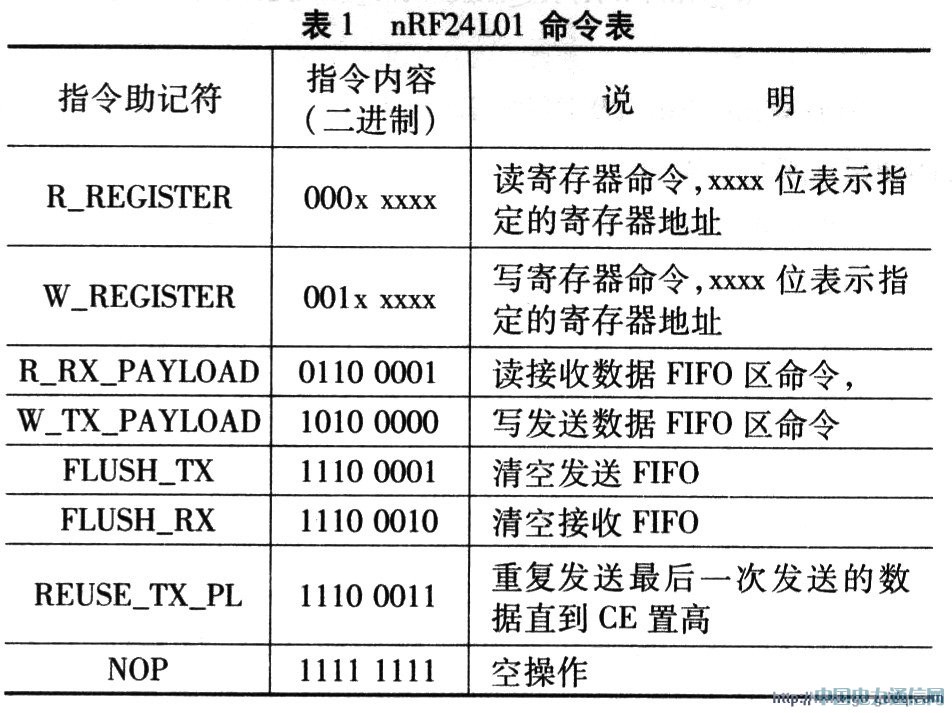
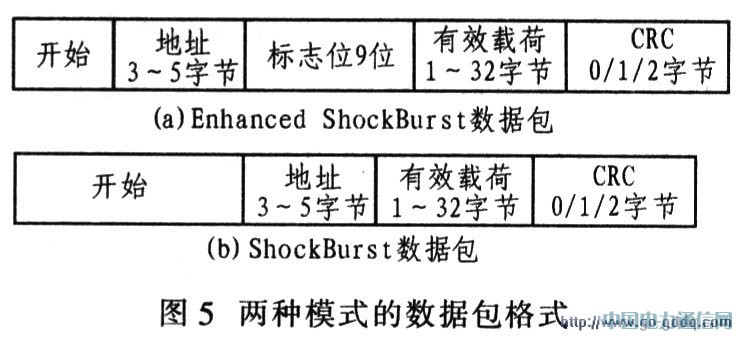
ė╔▒Ē┐╔ęŖŻ¼═©▀^SPIĮė┐┌é„╚ļnRF24L01Ą─Ą┌ę╗éĆūų╣Ø╩Ū├³┴ŅūųŻ¼nRF24L0lĄ─Ė„ĘN├³┴ŅūųČ╝ų╗ėąę╗éĆūų╣ØŻ¼Ęų×ķūx╝─┤µŲ„Īóīæ╝─┤µŲ„ĪóūxöĄō■Įė╩šŠÅø_ģ^Īóīæ░l╦═öĄō■ŠÅø_ģ^Ą╚ĪŻį┌▌ö╚ļ╚╬ęŌ├³┴ŅūųĄ─═¼ĢrŻ¼MISO▌ö│÷Ą─Č╝╩ŪSTATUS╝─┤µŲ„Ą─ā╚╚▌ĪŻnRF24L0lĄ─öĄō■é„▌ö─Ż╩ĮėąShockBurst║═Enhanced ShockBurstā╔ĘNöĄō■░³ĪŻ║¾š▀▒╚Ū░š▀ČÓ┴╦ę╗éĆ┤_šJöĄō■é„▌öĄ─ą┼╠¢Ż¼▒ŻūCöĄō■é„▌öĄ─┐╔┐┐ąįĪŻįōŲ„╝■ā╚▓┐═Ļ│╔ąĶę¬Ė▀╦┘╠Ä└ĒĄ─RFģfūhŻ¼░l╦═öĄō■Ģrų╗ąĶīóöĄō■Ę┼╚ļ░l╦═öĄō■ŠÅø_ģ^Ż¼Ų„╝■Ģ■ūįąą«a╔·Ū░ī¦ūųĘ¹║═CRCöĄō■Ż¼▓óīó▀@ą®öĄō■ĄžųĘ║═ĄžųĘą┼ŽóĪó░l╦═öĄō■ŠÅø_ģ^Ą─öĄō■Ą╚ĮM│╔ę╗éĆöĄō■░³░l╦═│÷╚źĪŻłD5Įo│÷ā╔ĘN─Ż╩ĮĄ─öĄō■░³Ė±╩ĮĪŻ
¼F░┤║¾ę╗ĘN─Ż╩Į│§╩╝╗»ĪŻį┌┼õų├×ķĮė╩šöĄō■ĢrŻ¼nRF24L01Įė╩šĄĮöĄō■░³║¾Ż¼ė╔ė▓╝■ĮŌ╬÷ĄžųĘöĄō■║═ą┼ŽóöĄō■Ż¼«öĮė╩šĄĮėąą¦ą┼ŽóöĄō■║¾Ż¼į┌IRQę²─_«a╔·ųąöÓŻ¼▓ó═©ų¬═Ō▓┐╠Ä└ĒŲ„ūx╚ĪöĄō■ĪŻį┌┼õų├×ķ░l╦═öĄō■ĢrŻ¼nRF24L0l░l╦═öĄō■░³║¾Ż¼ūįäėŪąōQĄĮĮė╩š─Ż╩ĮęčĮė╩šĘĄ╗žĄ─┤_šJą┼╠¢Ż¼«ö╩šĄĮ┤_šJą┼╠¢║¾Ż¼IRQę²─_«a╔·öĄō■░l╦══Ļ│╔ųąöÓŻ¼╚ń╣¹ø]ėą╬š╩ųą┼╠¢ĘĄ╗žŻ¼ät▒Ē╩Š░l╦═╩¦öĪŻ¼Ų„╝■ūįäėųžą┬░l╦═Ż¼╚ń╣¹ųžą┬░l╦═Ą─┤╬öĄ│¼▀^į┌ARC_CNT╝─┤µŲ„ųąĄ─įOČ©ųĄĢrŻ¼Ģ■į┌IRQę²─_«a╔·ųž░l┤╬öĄ│¼Ž▐ųąöÓĪŻMCU▓ķįāSTATUS╝─┤µŲ„Ą─ųĄŻ¼╝┤┐╔┼ąöÓ╩Ū░l╦══Ļ│╔ųąöÓŻ¼▀Ć╩Ūųž░l┤╬öĄ│¼Ž▐ųąöÓĪŻ
«ö░l╦═Č╦nRF24L0l┼õų├│╔PTX─Ż╩ĮĢrŻ¼┼õų├nRF24L01╣żū„į┌║¾ę╗ĘN░l╦═─Ż╩ĮŽ┬Ż¼ųžą┬░l╦═Ą─Ą╚┤²Ģrķg×ķ250μsŻ¼ųžą┬░l╦═┤╬öĄ×ķ10┤╬Ż¼ĄžųĘ╩ŪTX_AWŻ¼▌ö│÷╣”┬╩×ķ0 dBmŻ¼╦┘Č╚×ķ2 Mb/sŻ¼▓óŪę╩╣─▄░l╦══Ļ│╔║═ųž░l╦═┤╬öĄ│¼Ž▐ā╔ĘNųąöÓŻ¼CRCąŻ“×╬╗×ķ2ūų╣ØŻ¼nRF24L01╠Äė┌Power_UPĀŅæBĪŻ║»öĄųąWRITE_REG×ķīæ├³┴Ņ╗∙ĄžųĘ0x20ĪŻ│╠ą“╚ńŽ┬Ż║
«öĮė╩šČ╦nRF24L01─ŻēK┼õų├│╔PRX─Ż╩ĮĢrŻ¼┼õų├nRF24L0l╣żū„į┌Įė╩š─Ż╩ĮŽ┬Ż¼ĄžųĘ╩ŪRX_AWŻ¼žō▌döĄō■īÆČ╚╩ŪTX_PL_WŻ¼╩╣─▄Įė╩š═ĻöĄō■ųąöÓŻ¼CRCąŻ“×╬╗×ķ2ūų╣ØŻ¼nRF24L01╠Äė┌POWER_UPĀŅæBĪŻ│╠ą“╚ńŽ┬Ż║
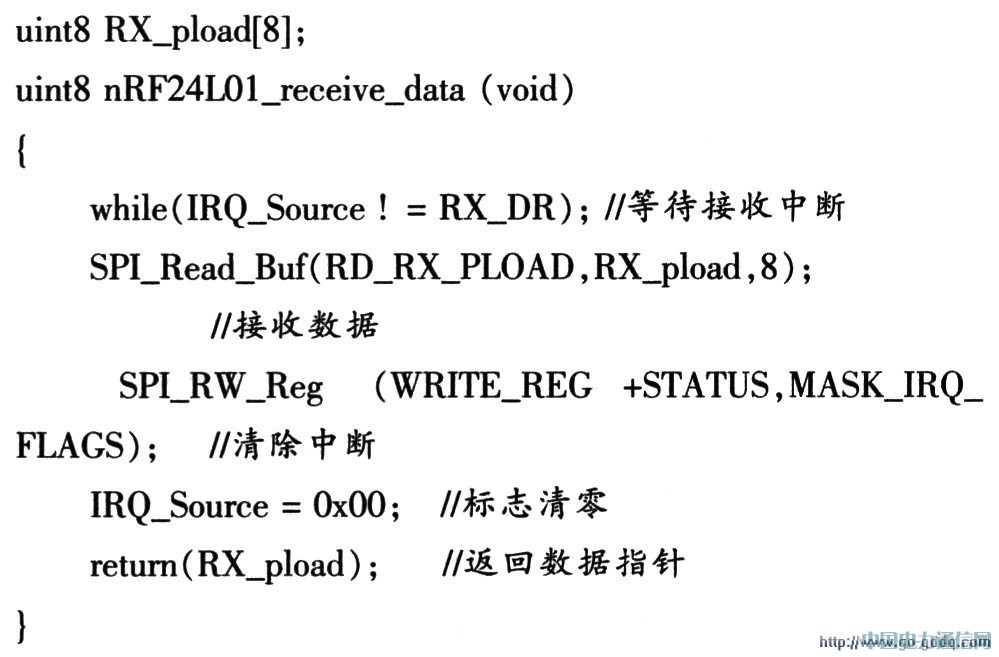
5.2 nRF24L01Ą─öĄō■╩š░l
Ż©1Ż®░l╦═öĄō■ «önRF24L0l─ŻēK┼õų├│╔░l╦═─Ż╩Į║¾Ż¼Ž“░l╦═FIFO▌ö╚ļöĄō■╝┤┐╔åóäėé„▌öĪŻ░l╦═8 ByteĄ─│╠ą“╚ńŽ┬Ż║
Ż©2Ż®Įė╩šöĄō■ «önRF24L0l─ŻēK┼õų├│╔Įė╩š─Ż╩Į║¾Ż¼į┌Įė╩šĄĮöĄō■ųąöÓ░l╔·ĢrŻ¼Å─Įė╩šFIFOūx╚ĪöĄō■ĪŻĮė╩š8ūų╣ØĄ─│╠ą“╚ńŽ┬Ż║
6 ĮYšZ
ĮķĮB┴╦╗∙ė┌ARM║═nRF24L0lĄ─¤oŠĆöĄūųé„▌öŽĄĮyĄ─ė▓▄ø╝■įOėŗĪŻįōŽĄĮyęčæ¬ė├ė┌╬óą═’wąąŲ„Ą─īŹĢrłDŽ±é„▌ö║═▀b£yųąĪŻį┌īŹļHæ¬ė├ųąŻ¼┐╔Ė∙ō■ąĶ꬯¼īónRF24LOlĮM│╔ę╗ī”ę╗Īóę╗ī”ČÓĪóČÓī”ČÓĄ─ĮYśŗĪŻįōŽĄĮy▀Ć┐╔ÅVĘ║æ¬ė├ė┌¤oŠĆ£y┐žĪó╬─╝■é„▌öĄ╚ŅIė“ĪŻ





