š¬ę¬Ż║×ķīŹ¼FĖ▀╦┘╣½┬Ę▄ć▌v│¼īÆ│¼Ė▀ų╬└Ē╣żū„Ą─ūįäė╗»ĪóųŪ─▄╗»Ż¼įOėŗ┴╦ę╗ĘN╗∙ė┌╝ż╣Ō├}ø_£yŠÓ╝╝ągĄ─ųŪ─▄▄ć▌vīÆĖ▀Öz£yŽĄĮyĪŻŽĄĮy▓╔ė├LMSČ■ŠS╝ż╣Ō£yŠÓé„ĖąŲ„Ż¼į┌ą┬ą═Ė▀ąį─▄╬ó╠Ä└ĒŲ„Ą─┐žųŲŽ┬Ż¼ī”▄ć▌v▌å└¬▀MąąĖ▀╦┘äėæBÆ▀├ĶŻ¼īó╦∙Įė╩šĄĮĄ─īŹĢröĄō■▀MąąĘų╬÷╠Ä└ĒŻ¼īŹ¼Fī”ąą▀M▄ć▌vĄ─īÆĖ▀Öz£y║═│¼Ž▐┬Ģ╣Ōł¾Š»ĪŻīŹ“×ĮY╣¹▒Ē├„Ż¼ŽĄĮy£y┴┐Š½Č╚×ķ±0.15mŻ¼£y┴┐£╩┤_┬╩▀_ĄĮ95%Ż¼ŽĄĮyąį─▄ØMūŃĖ▀╦┘╣½┬Ę╣▄└Ē▓┐ķTī”ė┌▄ć▌vīÆĖ▀│¼Ž▐Öz£yĄ─ę¬Ū¾ĪŻ
ļSų°╬ęć°ĮøØ·Ą─┐ņ╦┘░lš╣Ż¼Ė▀╦┘╣½┬ĘĮ©įO║═╣½┬Ę▀\▌öęÄ─ŻČ╝Ą├ĄĮ┴╦Ū░╦∙╬┤ėąĄ─░lš╣Ż¼ė╔┤╦ĦüĒĄ─▄ć▌v│¼Ž▐│¼▌d¼FŽ¾ę▓╚šęµć└ųžĪŻ│¼Ž▐▀\▌öę╗ĘĮ├µĢ■┐sČ╠╣½┬Ę║═ś“┴║Ą─╩╣ė├ē█├³Ż¼┴Ēę╗ĘĮ├µĢ■įņ│╔▄ć¾wą╬ĀŅĄ─Ė─ūā╝░▄ć▌vąį─▄Ą─Ž┬ĮĄŻ¼ą╬│╔Į╗═©░▓╚½Ą─ć└ųžļ[╗╝ĪŻ─┐Ū░Ż¼▄ć▌v│¼īÆ│¼Ė▀ų╬└Ēū„×ķų╬│¼╣żū„Ą─ųžę¬ĮM│╔▓┐ĘųŻ¼┤¾ČÓ▀Ć╠Äė┌╚╦╣żļAČ╬Ż¼ų„ę¬ė╔╣żū„╚╦åTė├ŠĒ│▀╗“š▀ų±Ė═īŹ£yīÆĖ▀Ż¼╝╚į÷╝ė┴╦╣żū„╚╦åTĄ─╣żū„┴┐Ż¼ėųĮĄĄ═┴╦╣żū„ą¦┬╩ĪŻ×ķīŹ¼F│¼Š╣│¼Ė▀ų╬└Ē╣żū„Ą─ūįäė╗»║═ųŪ─▄╗»Ż¼▓╔ė├╝ż╣Ō£yŠÓ╝╝ągŻ¼▀xė├╗∙ė┌ARM Cortex-M3ā╚║╦Ą─╠Ä└ĒŲ„LM3S8962Ż¼įOėŗķ_░l┴╦ę╗╠ūųŪ─▄▄ć▌vīÆĖ▀Öz£yŽĄĮyĪŻ▒ŠŽĄĮy┐╔ī”ąą▀M▄ć▌v▀MąąĖ▀Š½Č╚äėæBÆ▀├ĶŻ¼īŹ¼FīÆĖ▀Öz£yĪŻ
1 ╝ż╣Ō£yŠÓé„ĖąŲ„Ą─▀xō±
╝ż╣ŌęįŲõĖ▀┴┴Č╚ĪóĖ▀ĘĮŽ“ąįĪóĖ▀å╬╔½ąįĄ╚ā׳cŻ¼▒╗ÅVĘ║æ¬ė├ė┌Ė„ĘN£y┴┐ŅIė“ųąĪŻ╝ż╣Ō£yŠÓŽÓ▒╚╝t═Ō£yŠÓŻ¼│¼┬Ģ▓©£yŠÓĄ╚ĘĮ╩ĮŻ¼Š▀ėą╦┘Č╚┐ņŻ¼īŹĢrąįÅŖŻ¼½@╚ĪöĄō■Š½Č╚Ė▀Ą╚╠ž³cĪŻ╝ż╣Ō£yŠÓ╝╝ągęčį┌Ų¹▄ćĘ└ū▓Ż¼Į©ų■╗“┐šĄž░▓╚½▒OūoŻ¼▄ēĄ└Į╗═©Ą╚ŅIė“Ą├ĄĮ┴╦ÅVĘ║Ąžæ¬ė├ĪŻ×ķ┴╦ØMūŃĖ▀╦┘╣½┬Ę▄ć▌vīÆĖ▀Öz£yŽĄĮy£y┴┐╦┘Č╚┐ņŻ¼£y┴┐Š½Č╚Ė▀Ą─ę¬Ū¾Ż¼▀Ć┐╝æ]ĄĮŽĄĮy─▄į┌─▄ęŖČ╚▌^▓ŅĄ─ŁhŠ│╔§ų┴ę╣ķg╣żū„Ż¼ŽĄĮy▀xė├Ą┬ć°SICK╣½╦Š╔·«aĄ─LMSą═ļp├}ø_╝ż╣Ō£yŠÓé„ĖąŲ„ĪŻ
LMS╝ż╣Ōé„ĖąŲ„╩Ūę╗ĘNæ¶═Ōą═ĘŪĮėė|╩ĮĄ─Ė▀Š½Č╚ĪóĖ▀ĮŌ╬÷Č╚═Ō▓┐é„ĖąŲ„Ż¼Ųõ╣żū„įŁ└Ē╩Ū╗∙ė┌ī”╝ż╣Ō╩°’wąąĢrķgĄ─£y┴┐Ż¼Ųõ░┤ššČ©┴x║├Ą─ĢrķgķgĖ¶░l│÷╝ż╣Ō├}ø_Ż¼═©▀^Č©ĢrŲ„ėŗ╦Ń░l╔õ├}ø_║═Įė╩š├}ø_ų«ķgĄ─ĢrķgķgĖ¶üĒĄ├ĄĮ┼c▒╗£y╬’¾wų«ķgĄ─ŠÓļxĪŻ├}ø_╝ż╣Ō╩°Įø▀^£yŠÓé„ĖąŲ„ā╚▓┐Ą─ę╗éĆą²▐DĘ┤╣ŌńRĄ─Ę┤╔õī”ų▄ć·ŁhŠ│ą╬│╔╔╚├µÆ▀├ĶĪŻ╝ż╣ŌÆ▀├Ķ£yŠÓĄ─╣żū„įŁ└Ē╚ńłD1╦∙╩ŠĪŻ
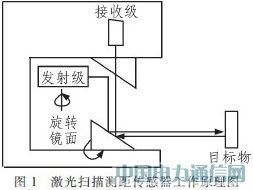
─┐ś╦╬’¾wĄ─▌å└¬ŠĆė╔╦∙Įė╩šäqĄ─ę╗ŽĄ┴ą├}ø_ą“┴ąüĒ┤_Č©ĪŻLMS╝ż╣Ōé„ĖąŲ„Ą─Æ▀├ĶŅl┬╩╩Ū25Hz/50HzŻ¼ĮŪČ╚Ņl┬╩╩Ū0.25°/0.5°Ż¼Æ▀├ĶĮŪČ╚ĘČć·╩Ū0°Ī½270°Ż¼ūŅ┤¾Æ▀├ĶŠÓļx╩Ū20mŻ¼ś╦£╩£y┴┐Š½Č╚×ķ±30mmŻ¼░▓╚½Ę└ūoĄ╚╝ē×ķIP67Ż¼ī”╚╦č█░▓╚½ĪŻÉ║┴ėĄ─ŁhŠ│ę“╦žī”£y┴┐ĘČć·ø]ėąė░ĒæŻ¼┐╔ė├ė┌╩ę═Ō£žČ╚-30Ī½+50ĪµĄ─ŁhŠ│ųąĪŻ
2 ŽĄĮyśŗ│╔╝░╣żū„įŁ└Ē
ųŪ─▄▄ć▌vīÆĖ▀Öz£yŽĄĮy═©▀^ī”▄ć▌v▀Mąą▀B└mäėæBÆ▀├ĶŻ¼▓╔╝»▄ć▌vĄ─═Ōą╬▌å└¬ą┼ŽóŻ¼▓óīó▓╔śėöĄō■īŹĢré„▀fĮo┐žųŲå╬į¬Ż¼┐žųŲå╬į¬═©▀^╠Ä└ĒĪóĘų╬÷Īóėŗ╦Ń▓╔śėöĄō■Ż¼Ą├│÷▄ć▌vīŹļHĄ─īÆČ╚║═Ė▀Č╚Ż¼▓óīó£y┴┐ųĄ’@╩Šį┌ę║Š¦Ų┴╔ŽŻ¼╣®¼Fł÷╣żū„╚╦åT▓ķ┐┤Ż¼═¼ĢrĖ∙ō■ć°╝ęęÄČ©Ą─Ž▐īÆųĄ║═Ž▐Ė▀ųĄ┼ąöÓ▒╗£y▄ć▌v─▄ʱ═©ąąĪŻ▒ŠŽĄĮy─▄ē“╩ųäėįOČ©Ž▐īÆųĄ║═Ž▐Ė▀ųĄŻ¼┐╔ęįī”ąą▀M▄ć▌v▀MąąīŹĢrÖz£yŻ¼Š▀ėą┬Ģ╣Ōł¾Š»║═šZę¶╠ß╩Š╣”─▄ĪŻŽĄĮyį┌īŹļHæ¬ė├ĢrŻ¼ę¬Ū¾ąą▀M▄ć▌v▄ć╦┘┐žųŲį┌20km/hęįŽ┬ĪŻīŹĢr┐ņ╦┘£y┴┐ę▓┐╔▒▄├ŌĮ╗═©ōĒČ┬¼FŽ¾ĪŻ
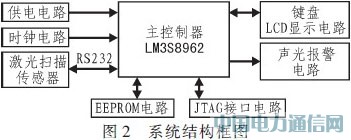
ųŪ─▄▄ć▌vīÆĖ▀Öz£yŽĄĮy▀xė├LM3S8962ū„×ķų„┐žųŲŲ„ĪŻLM3S8962╩Ūę╗┐Ņ╗∙ė┌ARMCortex-M3ā╚║╦Ą─Ą═╣”║─ĪóĖ▀╦┘Č╚╠Ä└ĒŲ„ĪŻLMS╝ż╣Ōé„ĖąŲ„═©▀^500kb/sĄ─Ė▀╦┘┤«ąąĮė┐┌īó£y┴┐öĄō■é„╦═Įoų„┐žųŲŲ„Ż¼▓╗Ģ■įņ│╔öĄō■Ą─üG╩¦ĪŻ┐žųŲŲ„īóĮė╩šĄĮĄ─Æ▀├ĶöĄō■▀Mąą╠Ä└ĒŻ¼ė╔ė┌Ųõā╚▓┐öĄō■┤µā”Ų„┐šķg┤¾Ż¼▓╗ąĶ═ŌöUöĄō■┤µā”Ų„ĪŻŽĄĮyĮYśŗ┐“łD╚ńłD2╦∙╩ŠĪŻ
3 ė▓╝■ļŖ┬ĘįOėŗ
ųŪ─▄▄ć▌vīÆĖ▀Öz£yŽĄĮyļŖÜŌ┐žųŲ▓┐Ęųęį╗∙ė┌ARMCortex-M3ā╚║╦Ą─LM3S8962╠Ä└ĒŲ„ū„×ķ┐žųŲ║╦ą─Ż¼░┤╣”─▄┐╔äØĘų×ķęįŽ┬─ŻēKŻ║ļŖį┤─ŻēKŻ¼ų„┐žųŲŲ„─ŻēKĪóĢrńŖ─ŻēKĪóöĄō■═©ėŹ─ŻēKĪóµI▒P▌ö╚ļ─ŻēKĪóę║Š¦’@╩Š─ŻēKĪó└^ļŖŲ„┐žųŲ─ŻēKĄ╚Ż¼ęįŽ┬ī”3éĆ▓┐Ęųū„▌^įö╝ÜĮķĮBĪŻ
3.1 ų„┐žųŲŲ„─ŻēKįOėŗ
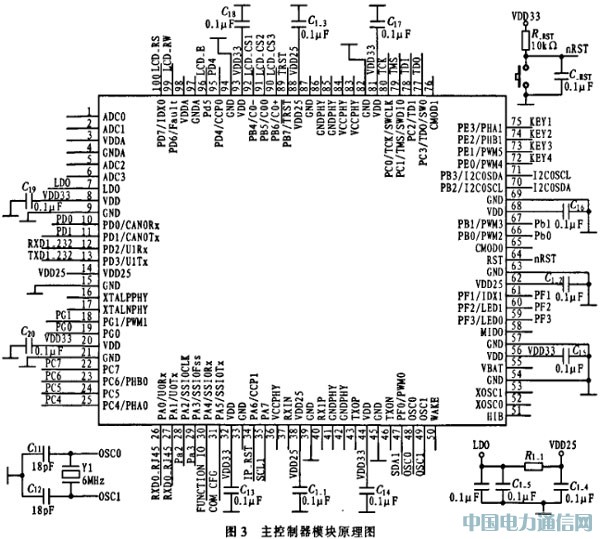
▓╔ė├ARMCortex-M3ā╚║╦Ą─╬ó┐žųŲŲ„LM3S8962ū„×ķŽĄĮy┐žųŲ║╦ą─ĪŻCortex-M3ā╚║╦▓╔ė├ARMv7-M╝▄śŗŻ¼╦³Šo£ÉĄžĮY║ŽThumb-2ųĖ┴Ņ╝»Ż¼▓╔ė├╣■Ę╠Ä└ĒŲ„╝▄śŗŻ¼┼cARM7TDMIŽÓ▒╚Ż¼▒╚ThumbųĖ┴Ņ├┐šū║šĄ─ą¦┬╩╠ßĖ▀┴╦70%Ż¼▒╚ARMųĖ┴Ņ╠ßĖ▀35%ĪŻė╔ė┌Thumb-2ųĖ┴Ņ╩ŪThumbųĖ┴ŅĄ─öUš╣Ż¼16╬╗║═32╬╗ųĖ┴Ņ╣▓┤µė┌═¼ę╗─Ż╩ĮŽ┬Ż¼Å═ļsąį┤¾Ę∙Ž┬ĮĄŻ¼┤·┤a├▄Č╚║═ąį─▄Š∙Ą├ĄĮ╠ßĖ▀ĪŻLM3S8962ĢrńŖŅl┬╩Ė▀▀_50HzŻ¼ČÓ▀_36éĆųąöÓį┤Š▀ėą8éĆā׎╚Ą╚╝ēŻ¼╠ß╣®ŽĄĮyĢrńŖŻ¼256kBĄ─FALSHŻ¼64kBĄ─SRAMŻ¼ą▌├▀─ŻēKŻ¼═©ė├«É▓Į╩š░lŲ„Ż¼═©ė├Č©ĢrŲ„Ż¼PCĮė┐┌ęį╝░Ųõ╦¹žSĖ╗Ą─═ŌįOĮė┐┌Ż¼┐╔ĘĮ▒ŃĄ─ī”Ė„ĘN¼Fł÷įOéõ▀Mąąėąą¦┐žųŲĪŻłD3×ķLM3S8962Ą─═ŌįOĮė┐┌╝░Ųõ═Ōć·ļŖ┬Ę(ĢrńŖĪóÅ═╬╗ĪóUARTĮė┐┌Ą╚)ĪŻ
3.2 öĄō■═©ėŹ─ŻēKįOėŗ
īó╝ż╣Ōé„ĖąŲ„Æ▀├ĶĄ├ĄĮĄ─śOųĄū°ś╦ą┼╠¢═©▀^═©ė├«É▓Į╩š░lŲ„(UART)é„╦═Įo╬ó┐žųŲŲ„Ż¼▀xė├┴╦MAX232▀MąąRS232ļŖŲĮ▐DōQŻ¼╚ńłD4╦∙╩ŠĪŻ
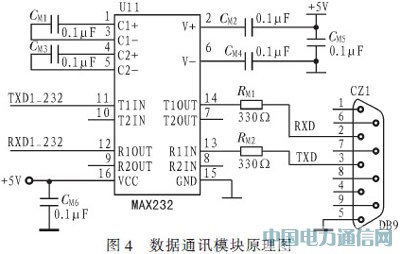
LM3S8962Š▀ėąā╔éĆ┤«ąąĮė┐┌UART0║═UART1ĪŻ▒ŠŽĄĮy▀xė├UART1ė├ė┌RS232═©ą┼╩╣ė├ĪŻUART╩Ūę╗ĘNæ¬ė├ÅVĘ║Ą─Č╠ŠÓļx┤«ąąé„▌öĮė┐┌Ż¼═©ą┼ļpĘĮų╗ę¬▓╔ė├ŽÓ═¼Ą─ļĖ±╩Į║═▓©╠ž┬╩Ż¼āHė├ā╔Ė∙ą┼╠¢ŠĆ(Rx║═Tx)Š═┐╔ęį═Ļ│╔═©ą┼▀^│╠Ż¼ėą¬Ü┴óĄ─░l╦═FIFO║═Įė╩šFIFOĪŻėą┐╔ŠÄ│╠Ą─▓©╠ž┬╩░l╔·Ų„Ż¼į╩įS╦┘┬╩Ė▀▀_460.8kb/sĪŻŽĄĮyųą═©▀^UARTé„╦═Ą─öĄō■Ė▀╦┘┤µā”ė┌SRAM┤µā”Ų„ā╚╣®╬ó┐žųŲŲ„▀MąąīŹĢr┐ņ╦┘ėŗ╦ŃĪŻ
3.3 ▌ö╚ļ▌ö│÷─ŻēKįOėŗ
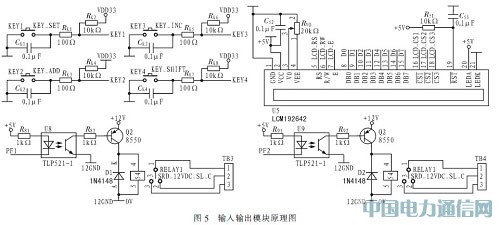
ŽĄĮyįOų├┴╦4éĆ░┤µIŻ¼ė├ė┌įOų├▄ć▌vĄ─Ž▐īÆŽ▐Ė▀ųĄŻ¼įOų├╝░ą▐Ė─ŽĄĮyĢrķgĄ╚Ż¼īŹ¼F┴╦ļSĢrą▐Ė─ą┼ŽóĄ─╣”─▄ĪŻ×ķ┴╦▒Ńė┌╣żū„╚╦åT▓ķ┐┤▀^═∙▄ć▌vĄ─īÆČ╚║═Ė▀Č╚Ż¼▓╔ė├┴╦LCD’@╩ŠĪŻ▀xė├ŪÓįŲäōą┬╣½╦Š╔·«aĄ─LCDę║Š¦’@╩Š─ŻēKLCM192642Ż¼╦³╩ŪØhūųłDą╬³cĻćę║Š¦’@╩Š─ŻēKŻ¼┐╔’@╩ŠØhūų║═łDą╬ĪŻ─ŻēK╣żū„ļŖį┤×ķ5VŻ╗Ė─ūāūā╬╗Ų„W1Ą─ųĄ┐╔ęįš{╣ØLCDŲ┴Ą─’@╩Šī”▒╚Č╚Ż╗š¹éĆLCDŲ┴▒╗Š∙Ęų×ķ╚²▓┐Ęų16Ī½18╩Ū▀xŲ┴ą┼╠¢ŠĆŻ¼┐╔ęį▀xō±Ųõųą╚╬ę╗▓┐Ęų’@╩ŠĪŻŽĄĮyųąįOų├┴╦2éĆ12V└^ļŖŲ„Ż¼«öąą±é▄ć▌vĮøÖzÕÄ│¼▀^┴╦ś╦£╩Ą─īÆČ╚║═Ė▀Č╚ĢrŽĄĮyĢ■═©▀^└^ļŖŲ„ĘųäeĮė═©Š»¤¶║═╩ę═ŌöUę¶Ų„Ą─ļŖį┤Č°«a╔·┬Ģ╣Ōł¾Š»Ż¼ę╗ĘĮ├µ╠ß╩Š¼Fł÷╣żū„╚╦åT▀Mąą╠Ä└ĒŻ¼┴Ēę╗ĘĮ├µĖµų¬╦ŠÖCįō▄ć│¼Ž▐ąĶ═Ż▄ćĮė╩▄╠Ä└ĒĪŻ╚ńŽ┬łD5╦∙╩Š×ķ▌ö╚ļ▌ö│÷─ŻēKįŁ└ĒłDĪŻ
4 ŽĄĮy▄ø╝■įOėŗ
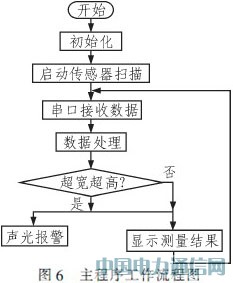
▒ŠŽĄĮy▓╔ė├LAR5.11ū„×ķķ_░lŁhŠ│Ż¼╩╣ė├CšZčįŠÄ│╠Ż¼▓╔ė├─ŻēK╗»│╠ą“įOėŗĪŻ▄ø╝■įOėŗĘų×ķų„┐ž─ŻēKĪó│§╩╝╗»─ŻēKĪóųąöÓ╠Ä└Ē─ŻēKĪóöĄō■░l╦═║═Įė╩š─ŻēKĪóöĄō■╠Ä└Ē─ŻēKĪóµI▒P║═’@╩Š─ŻēKĄ╚Äū▓┐ĘųĪŻų„│╠ą“╣żū„┴„│╠łD╚ńłD6╦∙╩ŠĪŻŽĄĮy╔ŽļŖ║¾Ż¼╩ūŽ╚═Ļ│╔ŽĄĮy│§╩╝╗»Ż¼╚╗║¾Įoé„ĖąŲ„░l├³┴ŅŻ¼åóäėé„ĖąŲ„Æ▀├ĶŻ¼Įė╩š┤«┐┌░lüĒĄ─öĄō■Ż¼Å─┤«┐┌ŠÅø_ģ^╠ß╚Ī╦∙ąĶöĄō■Ż¼Ė∙ō■öĄō■ą┼Žó▀Mąą▐DōQŻ¼┼ąöÓŻ¼▒╚▌^Ż¼┤µā”ĪŻ▀MąąöĄō■Ęų╬÷╠Ä└Ē║¾š{ė├ŽÓæ¬Ą─ł╠ąąūė│╠ą“═Ļ│╔ŽÓæ¬Ą─╣”─▄Ż¼╚ńš{ė├LCDūė│╠ą“’@╩Š▄ć▌vīÆĖ▀ą┼ŽóĄ╚Ż¼│╠ą“▀M╚ļ▓╗öÓ裣h╣żū„ĀŅæBĪŻ
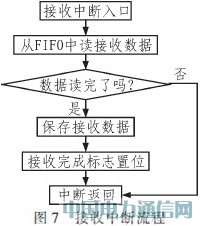
öĄō■▓╔╝»╩╣ė├┤«┐┌═©ėŹ─Ż╩ĮŻ¼░l╦═öĄō■▓╔ė├▓ķįāĘĮ╩Į═Ļ│╔Ż¼Įė╩šöĄō■▓╔ė├ųąöÓĘĮ╩Į═Ļ│╔Ż¼Įė╩šųąöÓ┴„│╠╚ńłD7╦∙╩ŠĪŻé„ĖąŲ„║═ų„┐žųŲŲ„ų«ķg═©▀^╩┬Ž╚╝sČ©Ą─═©ėŹģfūh▀MąąöĄō■╩š░lŻ¼ų„┐žųŲŲ„ų╗ąĶįOų├║├ŽÓæ¬Ą─┤«┐┌╠¢Īó▓©╠ž┬╩╝░ŽÓæ¬Č╦┐┌įO┴┐Ż¼░l╦═£y┴┐├³┴ŅŻ¼Ą╚┤²Įė╩šĪŻå╬┤╬ūxöĄō■├³┴Ņ×ķŻ║RNLMDscandatataŻ╗▀B└mūxöĄō■├³┴Ņ×ķŻ║EN LMDscandata1Ż╗▀B└m═ŻöĄō■├³┴Ņ×ķŻ║EN LMDscandata0ĪŻ
5 ─ŻöMīŹ“×
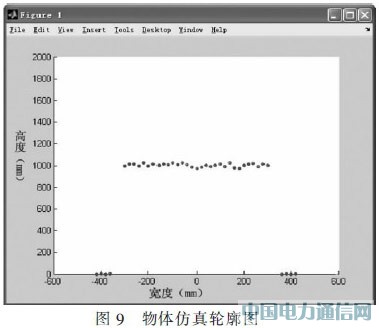
ŽĄĮyš¹¾wįOėŗ═Ļ│╔║¾Ż¼į┌▀M╚ļ│¼Ž▐³c▀Mąą¼Fł÷š{įćų«Ū░Ż¼į┌īŹ“×╩ę▀Mąą┴╦─ŻöMīŹ“×ĪŻīó╝ż╣Ōé„ĖąŲ„╣╠Č©į┌3mĖ▀Ą─ų¦╝▄╔ŽŻ¼ūīę╗Ę┼ų├┴óĘĮ¾w▒╗£y╬’Ą─ąĪ═Ų▄ćęį10km/hĄ─╦┘Č╚Å─╝ż╣Ōé„ĖąŲ„Ž┬Įø▀^Ż¼╚ńłD8╦∙╩ŠĪŻīó╝ż╣Ōé„ĖąŲ„įOų├į┌Æ▀├ĶĮŪČ╚×ķ0°Ī½180°Ż¼ĮŪČ╚Ęų▒µ┬╩×ķ0.5°Ą──Ż╩ĮŽ┬Ż¼«öąĪ═Ų▄ć═Ļ╚½Įø▀^ĢrŻ¼ę║Š¦Ų┴╔Ž╝┤┐╔’@╩Š┴óĘĮ¾w▒╗£y╬’Ą─ūŅ┤¾īÆČ╚║═Ė▀Č╚Ż¼═¼Ģr┐╔═©▀^MATLABĘ┬šµ╬’¾wĄ─▌å└¬Ż¼╚ńłD9╦∙╩ŠĪŻ═¼Ą╚Śl╝■Ž┬Ż¼ūīąĪ═Ų▄ćį┌é„ĖąŲ„Ž┬Ž╚║¾═©▀^öĄ┤╬║¾ĮyėŗĮY╣¹Ż¼īó£y┴┐ųĄ║═īŹļHųĄ▒╚▌^┐╔Ą├š`▓Ņį┌0.15męįā╚Ą─▀_ĄĮ95%Ż¼Ę¹║Ž£y┴┐Š½Č╚ę¬Ū¾ĪŻ

6 ĮY╩°šZ
ßśī”Ė▀╦┘╣½┬Ę▄ć▌v│¼Ž▐│¼▌d▀@ę╗å¢Ņ}Ż¼įOėŗ┴╦╗∙ė┌╝ż╣Ō£yŠÓ╝╝ągĄ─īÆĖ▀Öz£yŽĄĮyŻ¼┐╔īŹ¼Fī”ąą▀M▄ć▌v▀MąąīŹĢräėæB£y┴┐ĪŻ▒ŠŽĄĮyį┌īŹ“×Ų┌ķgŻ¼╣żū„┐╔┐┐ĘĆČ©Ż¼╣”║─Ą═Ż¼ėŗ╦Ń╦┘Č╚┐ņŻ¼£y┴┐Š½Č╚Ė▀Ż¼┐╣Ė╔ö_─▄┴”ÅŖŻ¼īŹ“ך`▓ŅĘ¹║ŽĖ▀╦┘╣½┬Ę╣▄└Ē▓┐ķTī”ė┌ąą▀M▄ć▌vīÆĖ▀│¼Ž▐Öz£yĄ─ę¬Ū¾ĪŻ═©▀^Ę┤Å═īŹ“ד×ūCŻ¼įōįOėŗėąą¦┐╔ąąŻ¼×ķŽ┬ę╗ļAČ╬▀M╚ļ¼Fł÷▀MąąīŹĄžš{įćū„┴╦│õĘų£╩éõĪŻ





