š¬ę¬Ż║Įo│÷┴╦▓╔ė├Mean-Shift┼cCamshiftŽÓĮY║ŽĄ─ĘĮĘ©üĒįOėŗę╗ĘN╗∙ė┌ęĢŅlłDŽ±Ą─╗čµĖ·█Ö╠Ä└Ē╦ŃĘ©ĪŻįō╦ŃĘ©╩ūŽ╚└¹ė├Mean-ShiftĘĮĘ©ĘųĖŅłDŽ±▓ó┤_Č©╗čµģ^ė“Ż¼╚╗║¾į┌┤╦ģ^ė“ā╚╠ß╚Ī╠žš„Ż¼į┘ė├Camshift╦ŃĘ©▀Mąą╗čµĖ·█ÖĪŻ┤╦ĘĮĘ©└¹ė├╗赳DŽ±Ą─Ė▀┴┴╠žš„Ż¼┐╦Ę■┴╦é„ĮyCamshift╦ŃĘ©ąĶę¬╚╦×ķČ©╬╗║═╚▌ęū░l╔óĄ╚╚▒³cĪŻ
0 ę²čį
╗Ą─╩╣ė├╩Ū╚╦ŅÉĄ─éź┤¾äō┼eų«ę╗ĪŻĄ½╗ę╗Ą®╩¦╚ź┐žųŲŻ¼Š═Ģ■│╔×ķūį╚╗║═╔ńĢ■Ą─ę╗ĘNĘŪ│Ż┤¾Ą─╬Ż║”ĪŻį┌╬ęéāĄ─╚š│Ż╔·╗ŅųąŻ¼╗×─▓ó▓╗╩Ūę╗éĆ─░╔·Ą─įÆŅ}ĪŻĮ³─ĻüĒŻ¼╬ęć°Š═░l╔·┴╦ÄūŲ╚½ć°š¾@Ą─╗×─Ż¼Įo╚╦éāĄ─╔·├³žö«a░▓╚½įņ│╔┴╦ć└ųžĄ─╬Ż║”ĪŻ╗×─░l╔·║¾Ż¼╚ń╣¹─▄╝░įńĄ─ł¾Š»▓ó▀Mąąūįäė┐žųŲ£ń╗Ż¼ī”ė┌£pąĪ╗×─╦∙ĦüĒĄ─╬Ż║”Ż¼¤oę╔Š▀ėąĘŪ│Żųžę¬Ą─ęŌ┴xĪŻ
é„ĮyĄ─╗×─ł¾Š»ŽĄĮyę╗░Ń╗∙ė┌╝t═Ōé„ĖąŲ„║═¤¤ņFé„ĖąŲ„Ż¼ę▓Š═╩Ū╠Į£y╗×─░l╔·Ģr╔·│╔Ą─¤¤Īó£žČ╚║═╣Ōģó┴┐Ą╚Ż¼╚╗║¾Įøą┼╠¢╠Ä└ĒĪó▒╚▌^Īó┼ąöÓ║¾Ż¼░l│÷╗×─ł¾Š»ą┼╠¢ĪŻČ°ė╔ė┌╗赳DŽ±Š▀ėą┴┴Č╚Ė▀Īó├µĘe▓╗ęÄätĪó╚╝¤²ĢrŽÓī”ĘĆČ©Ą╚╠žš„Ż¼═¼Ģrėųėą▒O┐žĘČć·┤¾Ż¼īŹĢrąį║├Ą╚ā׳cŻ¼ę“┤╦Ż¼╗∙ė┌ęĢŅlłDŽ±Ą─ÖCŲ„ęĢėX╗×─╠Į£yŽĄĮyĄ├ĄĮ┴╦▌^┐ņ░lš╣Ż¼▓óęč│╔╣”æ¬ė├ė┌┤¾┐šķgūįäėÖz£y£ń╗ŽĄĮyųąĪŻ
ę╗░ŃŪķørŽ┬Ż¼┐╝æ]ĄĮįńŲ┌╗×─äéäé░l╔·ĢrŻ¼ę╗Ą®┬®ł¾╗“š▀╗ä▌░lš╣▌^┐ņŻ¼╗赊═Ģ■ūā│╔äėæB─┐ś╦Ż¼ę“┤╦Ż¼ę¬Ū¾ŽĄĮy┐╔ęįėąą¦Ą─ūRäe╗čµ▓óī”äėæB╗čµ▀MąąīŹĢrĖ·█ÖŻ¼▀MČ°┐žųŲįŲ┼_▀Mąą£╩┤_Ą─£ń╗╣żū„ĪŻ▒Š╬─ų„ę¬ī”╗∙ė┌Mean-Shift╦ŃĘ©Ą─╗赳DŽ±ĘųĖŅęį╝░╗∙ė┌Camshift╦ŃĘ©Ą─äėæB╗čµĖ·█ÖĘĮĘ©▀MąąčąŠ┐ĪŻ
1 ╗赳DŽ±ĘųĖŅ
1.1 Mean-ShiftĘųĖŅįŁ└Ē
Mean-Shift╩Ūę╗ĘNĘŪģóöĄ╗»Ą─ČÓ─Żą═ĘųĖŅĘĮĘ©Ż¼╦³Ą─╗∙▒Šėŗ╦Ń─ŻēK▓╔ė├Ą─╩Ūé„ĮyĄ──Ż╩ĮūRäe│╠ą“Ż¼╝┤═©▀^Ęų╬÷łDŽ±Ą─╠žš„┐šķg║═Š█ŅÉĄ─ĘĮĘ©üĒ▀_ĄĮĘųĖŅĄ──┐Ą─ĪŻ╦³╩Ū═©▀^ų▒Įė╣└ėŗ╠žš„┐šķgĖ┼┬╩├▄Č╚║»öĄĄ─Šų▓┐śO┤¾ųĄüĒ½@Ą├╬┤ų¬ŅÉäeĄ─├▄Č╚─Ż╩ĮŻ¼▓ó┤_Č©▀@éĆ─Ż╩ĮĄ─╬╗ų├Ż¼╚╗║¾╩╣ų«Š█ŅÉĄĮ║═▀@éĆ─Ż╩ĮėąĻPĄ─ŅÉäe«öųąĪŻŽ┬├µī”Mean-Shift╦ŃĘ©▀Mąą║åĮķĪŻ
įOS╩ŪnŠS┐šķgXųąĄ─ę╗éĆėąŽ▐╝»║ŽŻ¼K▒Ē╩ŠX┐šķgųąλŪ“¾wĄ─ę╗éĆ╠žš„║»öĄŻ¼ätŲõ▒Ē▀_╩Į×ķŻ║

ŲõųąŻ¼x∈XŻ¼─Ū├┤į┌Ž“┴┐x³c╠ÄĄ─śė▒ŠŠ∙ųĄ×ķŻ║

Fukunaga║═HostetleĄ╚╚╦į┌Ųõūį╝║Ą─šō╬─ųą░čm(x)-xĄ─▓ŅĮąū÷Mean-ShiftĪŻMean-Shift╦ŃĘ©īŹļH╔ŽŠ═╩ŪöĄō■³cĄĮśė▒ŠŠ∙ųĄĄ─ųžÅ═ęŲäėŻ¼Č°Ūęį┌╦ŃĘ©Ą─├┐ę╗┤╬Ą³┤·▀^│╠ųąŻ¼ī”ė┌╦∙ėąĄ─s∈SŻ¼s←m(s)Č╝╩Ū═¼ĢrĄ─ĪŻ═¼ĢrŻ¼─Ż║²Š█ŅÉ╦ŃĘ©▀Ć░³└©ūŅ┤¾ēäŠ█ŅÉ╦ŃĘ©ęį╝░│Żė├Ą─kŠ∙ųĄŠ█ŅÉ╦ŃĘ©Ż¼╦³éāČ╝╩ŪMean-Shift╦ŃĘ©Ą─ę╗éĆėąŽ▐Ą─╠ž└²ĪŻMean-Shift╦ŃĘ©ū„×ķę╗ĘNŠ█ŅÉĘų╬÷ĘĮĘ©Ż¼ė╔ė┌Ųõ├▄Č╚╣└ėŗŲ„Ą─╠▌Č╚╩Ū▀fį÷Ą─Ż¼Č°Ųõ╩šö┐³c╝┤×ķ├▄Č╚╠▌Č╚Ą─Šų▓┐śO┤¾ųĄ³cŻ¼▀@éĆŠų▓┐śO┤¾ųĄ╝┤ī”æ¬╠žš„┐šķgųąĄ─ę╗éĆ─Ż╩ĮĪŻ
Mean-Shift╦ŃĘ©ī”ė┌Ė┼┬╩├▄Č╚║»öĄĄ─╣└ėŗ═©│Ż▓╔ė├Parzen┤░║»öĄĘ©Ż¼╝┤║╦├▄Č╚╣└ėŗŲ„ĪŻį┌dŠS┐šķgRdųąŻ¼ĮoČ©néĆöĄō■³cxiŻ¼i=1Ż¼2…nŻ¼³cxĄ─ČÓūā┴┐║╦├▄Č╚╣└ėŗŲ„Ą─ėŗ╦Ń╩Į╚ń╩Į(3)╦∙╩ŠĪŻ▀@éĆ╣└ėŗ┴┐┐╔ęįė╔║╦K(x)║═ę╗éĆī”ĘQš²Č©Ą─d×dīÆČ╚Ą─ŠžĻćHüĒ▒Ē╩ŠĪŻ
ę╗░ŃŪķørŽ┬Ż¼Š▀ėądéĆūā┴┐Ą─║╦K(x)╩Ūę╗éĆØMūŃęįŽ┬Śl╝■Ą─▀ģĮń║»öĄŻ║
ŲõųąŻ¼ck╩Ūę╗éĆ│Ż┴┐ĪŻÅ─łDŽ±ĘųĖŅĄ──┐Ą─│÷░lŻ¼ČÓūā┴┐║╦K(x)▓╔ė├Ą─╩ŪĘ┼╔õĀŅī”ĘQ║╦Ks(x)=akŻ¼dK1(Ī¼xĪ¼)Ż¼ŲõųąK1(z)╩Ūę╗éĆī”ĘQĄ─å╬ūā┴┐║╦Ż¼ŪęK(x)ØMūŃŽ┬╩ĮŻ║

ŲõųąŻ¼ckŻ¼d╩Ū┐╔╩╣K (x)Ą╚ė┌1Ą─Üwę╗╗»│Ż┴┐ĪŻ
ĦīÆŠžĻćHę╗░Ń▀xō±ī”ĮŪĻćŻ¼H=diag[h12Ż¼…Ż¼h2d]╗“┼cå╬╬╗ŠžĻćH=h2I│╔▒╚└²ĪŻH=h2IŪķørŽ┬Ą─ę╗éĆ├„’@ā׳c╩Ūų╗ąĶĦīÆģóöĄh>0ĪŻ╚╗Č°Ż¼Å─╩Į(4)┐╔ęį┐┤│÷Ż¼╩ūŽ╚æ¬┤_Č©ė├ė┌╠žš„┐šķgĄ─ÜWÄū└’Ą┬ŠžĻćĄ─ėąą¦ąįĪŻ╚¶╩╣ė├ę╗éĆīÆČ╚ģóöĄhŻ¼ät╩Į(3)Š═Ģ■ūā│╔╚ńŽ┬Ąõą═Ą─▒Ē╩Š╩ĮŻ║

īó(6)╩Į┤·╚ļ╔Ž╩ĮŻ¼Š═┐╔ęįĄ├ĄĮę╗éĆ═©ė├Ą─Īóė├║╦Ę¹╠¢▒Ē╩ŠĄ─║╦├▄Č╚╣└ėŗ╩ĮŻ║

ī”ėą╗∙▒Š├▄Č╚║»öĄf(x)Ą─ę╗éĆ╠žš„┐šķgŻ¼Mean-Shift╦ŃĘ©Ęų╬÷Ą─Ą┌ę╗▓Į╩ŪšęĄĮ▀@éĆ├▄Č╚─Ż╩ĮŻ¼╚╗║¾ī”▀@éĆ─Ż╩Į▀MąąŽÓĻPŠ█ŅÉĪŻ┤╦─Ż╩Įæ¬įōį┌╠▌Č╚©īf(x)=0Ą─┴Ń³c«öųąŻ¼Č°Mean-Shift│╠ą“╩Ū▓╗ė├╣└ėŗ├▄Č╚Ż¼Č°ų▒Įėī”├▄Č╚Ą─╠▌Č╚▀Mąą╣└ėŗŻ¼Š═─▄Č©╬╗▀@ą®┴Ń³cĪŻ
ī”ė┌Mean-Shift╦ŃĘ©Ą─æ¬ė├┼cĘųĖŅŻ¼╩ūŽ╚Ż¼┐╔įOxi║═zi(i=1Ż¼2Ż¼…Ż¼n)Ęųäe×ķnŠS┐šķgā╚Ą─▌ö╚╦║═┬ō║ŽĄ─┐šųĄė“ā╚Ą─×V▓©łDŽ±Ą─Ž±╦žŻ¼Li×ķĘųĖŅ║¾Ą─łDŽ±ųąĄ─Ą┌iéĆŽ±╦žĪŻ─Ū├┤Ż¼Ųõ▓┘ū„┐╔Ęų×ķęįŽ┬▓Į¾EŻ║
(1)▀\ąąŠ∙ųĄŲĮęŲ×V▓©│╠ą“ī”łDŽ±▀Mąą×V▓©Ż¼▓ó┤µā”╦∙ėądŠS┐šķgā╚į┌zi╠ÄĄ─╩šö┐³czi=yiŻ¼cĪŻ
(2)į┌┬ō║Žė“ųąī”╦∙ėąĄ─zi▀MąąĘųĮMęį├Ķ╩÷ŅÉŻ¼▀@ą®ŅÉ{Cp}p=1…mį┌┐šė“ā╚▌^hs▌^Į³Ż¼į┌ųĄė“ā╚▌^hr▌^Į³ĪŻ
(3)ī”ė┌├┐ę╗éĆi=1Ż¼…Ż¼nŻ¼▓óėø×ķŻ║Li={p|zi∈Cp|}
(4)Ž¹│²į┌┐šķgģ^ė“ā╚╔┘ė┌MéĆŽ±╦žĄ─ģ^ė“ĪŻ
1.2 Mean-ShiftĘĮĘ©Ą─ĘųĖŅĮY╣¹
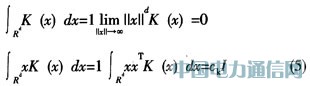
Mean-Shift╦ŃĘ©ĘųĖŅĄ─ĮY╣¹╚ńłD1Ī½łD3╦∙╩ŠĪŻ
ŲõųąłD1×ķ▒│Š░▌^×ķ║åå╬Ą─╗赳DŽ±Ą─ĘųĖŅĮY╣¹Ż¼łD2×ķėą╩ųļŖ═▓╣ŌĖ╔ö_Ž┬Ą─╗赳DŽ±Ż¼łD3×ķėą┬ʤ¶¤¶╣ŌĖ╔ö_Ž┬Ą─╗×─łDŽ±ĪŻ╚²Ę∙łDųąĄ─(a)Š∙×ķįŁłDŻ¼(b)×ķĘųĖŅ║¾Ą─ĮY╣¹ĪŻ┐╔ęį┐┤│÷Ż¼į┌╚²ĘNŪķørŽ┬Ż¼įō╦ŃĘ©Č╝─▄ē“ėąą¦Ą─ĘųĖŅ│÷╗赳DŽ±Ż¼Å─Č°┤_Č©╗čµģ^ė“Ż¼ęį▀_ĄĮ─┐ś╦ūRäeĄ──┐Ą─ĪŻ
2 Camshift╦ŃĘ©
CamShift╦ŃĘ©(Continuouslv Adaotive MeanShift)╩Ūėŗ╦ŃŠų▓┐ūŅā×ĮŌĄ─ę╗éĆīŹė├╦ŃĘ©ĪŻ▀@ĘN╦ŃĘ©Š▀ėą┐ņ╦┘Ė▀ą¦ų«╠ž³cŻ¼Š∙ųĄŲĮęŲ═©▀^Ą³┤·Å─║“▀x─┐ś╦ųąšęĄĮūŅĮėĮ³╝║ĮoČ©Ą──┐ś╦─Żą═ĪŻ╦³╩Ūę╗ĘN╗∙ė┌Ņü╔½ą┼ŽóĄ─ĘĮĘ©Ż¼┐╔ęįī”Š▀ėą╠žČ©Ņü╔½Ą─ą┼Žó─┐ś╦▀MąąĖ·█ÖĪŻ
«öĮ©┴ó▒╗Ė·█Ö─┐ś╦Ą─Ņü╔½Ė┼┬╩─Żą═║¾Ż¼▒Ń┐╔īóęĢŅlłDŽ±▐D╗»×ķŅü╔½Ė┼┬╩Ęų▓╝łDŻ¼╚╗║¾į┌Ą┌ę╗ļłDŽ±│§╗»ę╗éĆŠžą╬╦č╦„┤░Ż¼▀@śėŻ¼ī”ęį║¾Ą─├┐ę╗ļłDŽ±Ż¼CamShift─▄ē“ūįäėš{╣Ø╦č╦„┤░Ą─┤¾ąĪ║═╬╗ų├Ż¼Č©╬╗▒╗█Ö─┐ś╦Ą─ųąą─║═┤¾ąĪŻ¼═¼Ģrė├«öŪ░Ä¼Č©╬╗Ą─ĮY╣¹ŅA£yŽ┬ę╗ļłDŽ±ųą─┐ś╦Ą─ųąą─║═┤¾ąĪĪŻ┐é¾wČ°čįŻ¼CamShift╦ŃĘ©╩Ūę╗ĘNäėæBūā╗»Ęų▓╝Ą─├▄Č╚║»öĄ╠▌Č╚╣└ėŗĄ─ĘŪģóöĄĘĮĘ©ĪŻ
▒Š╬─╩╣ė├Ą─╩ŪCCDözŽ±Ņ^üĒ▓╔╝»▓╩╔½╗赳DŽ±Ż¼▓╩╔½łDŽ±╩╣ė├Ą─╩ŪRGB─Żą═ĪŻė╔ė┌CamShift╦ŃĘ©╩Ū╗∙ė┌Ņü╔½ą┼ŽóĄ─Ė·█Ö╦ŃĘ©Ż¼įō╦ŃĘ©ī”HSVŅü╔½─Żą═Ą─HĘų┴┐▒╚▌^├¶ĖąĪŻę“┤╦Ż¼×ķ╩╣ė├CamShift╦ŃĘ©▀MąąĖ·█ÖŻ¼▒žĒÜ╩ūŽ╚▀MąąÅ─RGB┐šķgĄĮHSV┐šķgĄ─▐DōQĪŻ
2.1 RGBĄĮHSV╔½▓╩┐šķgĄ─▐Dūā
RGB┐šķg×ķŠĆąį┐šķgŻ¼Č°HSV┐šķg×ķĘŪŠĆąį┐šķgĪŻÅ─RGB┐šķgĄĮHSV┐šķgĄ─▐DōQ╣½╩Į╚ńŽ┬Ż║
╩╣ė├╔Ž├µĄ─╣½╩ĮŻ¼┐╔ęįīóę╗Ę∙▓╩╔½łDŽ±Å─RGB┐šķg▐DōQĄĮHSV┐šķgĪŻÅ─Č°×ķ╩╣ė├CamShift╦ŃĘ©▀MąąĖ·█Ö┤“Ž┬┴╦╗∙ĄAĪŻ
2.2 CamshiftĖ·█Ö╦ŃĘ©
CamshiftĖ·█Ö╦ŃĘ©į┌▓┘ū„ĢrŻ¼╩ūŽ╚į┌Ņü╔½Ė┼┬╩Ęų▓╝łDųą▀x╚Ī┤¾ąĪ×ķSĄ─╦č╦„┤░WĪŻ╚╗║¾į┌ė├Ž┬╩Įėŗ╦Ń┴ŃļAŠžŻ║
╩ĮųąŻ¼I(xŻ¼y)╩Ūū°ś╦×ķ(xŻ¼y)Ą─³cĄ─Ž±╦žųĄŻ¼x║═yĄ─ūā╗»ĘČć·╝┤×ķ╦č╦„┤░Ą─ĘČć·ĪŻ
Ą┌Č■▓Įį┘ė├Ž┬╩Įėŗ╦Ń╦č╦„┤░Ą─┘|ą─(xcŻ¼yc)Ż║

ĮėŽ┬üĒĄ┌╚²▓Įį┘ųžą┬įOų├╦č╦„┤░Ą─┤¾ąĪS×ķ╔Ž├µ╦č╦„┤░ģ^ė“ā╚Ņü╔½Ė┼┬╩Ęų▓╝Ą─║»öĄĪŻ
ų«║¾Ż«į┘ųžÅ═Ą┌Č■▓ĮĪóĄ┌╚²▓ĮŻ¼ų▒ų┴╩šö┐(┘|ą─ūā╗»ąĪė┌ĮoČ©Ą─ķōųĄ)ĪŻ
┴ŃļAŠžĘ┤ė│┴╦─┐ś╦į┌łDŽ±ųąĄ─├µĘeŻ¼Č°Ņü╔½Ė┼┬╩Ęų▓╝łDīŹļH╔Ž╩ŪūŅ┤¾ųĄ×ķ255Ą─ļx╔ó╗ęČ╚łDŽ±Ż¼ė╔┤╦▒Ń┐╔įOų├╦č╦„┤░Ą─┤¾ąĪS║═Z00Ą─ĻPŽĄŻ¼╝┤Ż║

┐╝æ]ĄĮī”ĘQąįŻ¼Sæ¬╚ĪĮėĮ³ėŗ╦ŃĮY╣¹Ą─ŲµöĄĪŻ▀@śėŻ¼═©▀^ėŗ╦ŃČ■ļAŠžŻ¼▒Ń┐╔ęįĄ├ĄĮ▒╗Ė·█Ö─┐ś╦Ą─ķL▌SĪóČ╠▌S║═ĘĮŽ“ĮŪĪŻŲõČ■ļAŠž×ķŻ║
─Ū├┤Ż¼łDŽ±ųą─┐ś╦ķL▌S║═Č╠▌SĄ─ķLČ╚▒Ń┐╔ęį░┤ęįŽ┬╣½╩Į▀Mąąėŗ╦ŃŻ║
«ö╩╣ė├Camshift╦ŃĘ©ī”╠žČ©Ņü╔½Ą──┐ś╦▀MąąĖ·█ÖĢrŻ¼ę╗░Ń▓╗▒žėŗ╦Ń├┐ļłDŽ±╦∙ėąŽ±╦ž³cĄ─Ņü╔½Ė┼┬╩Ęų▓╝Ż¼Č°ų╗ąĶę¬ėŗ╦Ń▒╚«öŪ░╦č╦„┤░┤¾ę╗ą®Ą─ģ^ė“ā╚Ą─Ž±╦ž³cĄ─Ņü╔½Ė┼┬╩Ęų▓╝╝┤┐╔Ż¼▀@śė▒Ń┐╔╣Ø╩Ī║▄┤¾Ą─ėŗ╦Ń┴┐ĪŻę“┤╦Ż¼«öī”▀B└mĄ─ęĢŅlłDŽ±▀Mąą╠Ä└ĒĢrŻ¼īŹļH╔ŽŠ═ęčą╬│╔┴╦▀B└mĄ─Ė·█ÖĪŻ
3 ╗čµĖ·█ÖīŹ“×╝░ŲõĮY╣¹
▒Š╬─═©▀^Ė·█Ö▒│Š░▌^×ķ║åå╬Ą─╗čµęĢŅlłDŽ±║═ėą╩ųļŖ═▓╣ŌĖ╔ö_Ž┬Ą─╗čµęĢŅlłDŽ±üĒ“×ūC┤╦Ę©Ą─ėąą¦ąįŻ¼═¼ĢrĄ├│÷┴╦╚ńłD4║═łD5╦∙╩ŠĄ─“×ūCĮY╣¹łDĪŻ
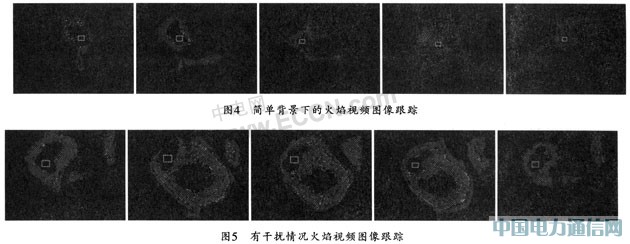
ŲõųąŻ¼łD4Ą─▒│Š░▌^×ķ║åå╬Ż¼įōłDųąāHėą╚╦Ą─Ėņ▓▓║═╗čµĪŻŲõįŁęĢŅlĄ─ę╗ļłDŽ±┐╔ģóęŖŪ░╬─Ą─łD1(a)ĪŻ
Č°į┌łD5ųąŻ¼ķ_╩╝ų╗ėą╗čµ║═╚╦─śĄ─ę╗▓┐ĘųĪŻ║¾üĒ╬ęéā╝ė╚ļ┴╦╩ųļŖ═▓╣ŌŻ¼ūŅ║¾į┘ĻPķ]╩ųļŖ═▓╣ŌĪŻŲõįŁęĢŅlĄ─ę╗ļłDŽ±┐╔ģó┐╝łD2(a)įŁłDĪŻ
═©▀^ęį╔ŽīŹ“×┐╔ęįūC├„Ż¼┤╦Ę©─▄ē“┐ņ╦┘£╩┤_Ą─Ė·█Ö╗赥─▀\äėŻ¼▓óŪęø]ėą«a╔·─┐ś╦üG╩¦║═Ė·█Öģ^ė“░l╔óĄ─ŪķørĪŻ
4 ĮY╩°šZ
▒Š╬─╠ß│÷┴╦ę╗ĘNMean-Shift┼cCamshiftŽÓĮY║ŽĄ─äėæB╗čµĖ·█Ö╦ŃĘ©ĪŻŲõųą═©▀^Mean-Shiftī”╗赳DŽ±▀MąąĘųĖŅ┼cČ©╬╗Ą─ĘĮĘ©Ż¼┐╦Ę■┴╦é„ĮyCamshift╦ŃĘ©ąĶę¬▀Mąą╚╦╣żČ©╬╗ęį╝░╚▌ęū░l╔óĄ─╚▒³cĪŻĄ½╩ŪŻ¼╬─ųąĘĮĘ©į┌Ė╔ö_į┤▀^ČÓĢrŻ¼ę▓╚▌ęū«a╔·Ė·█ÖÕeš`Ą─ŪķørŻ¼▀@ę╗╚▒³cš²╩Ū║¾├µæ¬«ö└^└m蹊┐Ą─šnŅ}ĪŻ





