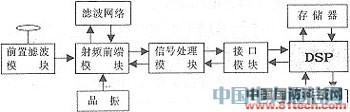
ļSų°ć°Ę└╝╝ągĄ─’w╦┘░lš╣Ż¼ę¬Ū¾ī¦ÅŚĄ╚Įø│Ż╣żū„į┌Ė▀äėæBŁhŠ│Ž┬╬õŲ„Ą─ąį─▄▓╗öÓĖ─▀MĪŻé„ĮyĄ─ī¦ÅŚųŲī¦╩ųČ╬▓╗─▄ØMūŃ¼F┤·æĀÄī”ī¦ÅŚ╠ß│÷Ą─Ė▀Š½Č╚ĪóĖ▀┐╔┐┐ąį║═Š▀ėąÅŖ┤¾æł÷╔·┤µ─▄┴”Ą─ę¬Ū¾ĪŻ└²╚ńé„ĮyĄ─ī¦ÅŚųŲī¦ŽĄĮy┤¾Č╝▓╔ė├æTī¦ŽĄĮyŻ¼ė╔ė┌▓╗öÓ╠ßĖ▀Ą─Ė─▀M═ė┬▌āx║═╝ė╦┘Č╚ėŗĄ─ę¬Ū¾║▄ļyĄ├ĄĮØMūŃŻ¼æTī¦ŽĄĮyČ©╬╗š`▓ŅļSĢrķgĘe└█Ą─╚▒³cįĮüĒįĮŽ▐ųŲŲõ▀Mę╗▓Įæ¬ė├ĪŻ─┐Ū░Ż¼╝āæTī¦ŽĄĮyļm─▄│§▓ĮØMūŃųąĮ³│╠ī¦ÅŚ’wąąĄ─³c┼c³cų«ķgī¦║ĮŠ½Č╚ę¬Ū¾Ż¼Ą½▓╗─▄ØMūŃ▀h│╠ĪóķLĢrķg║Įąą╝░╬õŲ„═ČöSĪóé╔▓ņĪóūā▄ē┐žųŲĄ╚Ė³Ė▀Š½Č╚Ą─ųŲī¦ę¬Ū¾ĪŻę“┤╦Ż¼║▄ėą▒žę¬čąŠ┐ą┬Ą─ųŲī¦╩ųČ╬üĒØMūŃ¼F┤·æĀÄĄ─ąĶę¬ĪŻļSų°GPS▀@ę╗╚½Ū“ąląŪČ©╬╗ŽĄĮyĄ─░lš╣Ż¼╠žäe╩Ūė╔ė┌įōŽĄĮyŠ▀ėą╚½Ū“ąįĪó╚½╠ņ║“Īó▀B└mĄ─Š½├▄╚²ŠSī¦║Į┼cČ©╬╗─▄┴”ęį╝░┴╝║├Ą─┐╣Ė╔ö_ąį║═▒Ż├▄ąįŻ¼įōŽĄĮy▒╗čĖ╦┘æ¬ė├ė┌▄Ŗ╩┬ŅIė“Ą─Ė„éĆĘĮ├µŻ¼▓óęč╚ĪĄ├┴╦┐╔ė^Ą─▄Ŗ╩┬ą¦ęµĪŻ▒ŠšnŅ}š²╩Ūį┌▀@ĘN▒│Š░Ž┬Ż¼čąŠ┐GPS▀@ę╗╚½ą┬Ą─╚½Ū“Č©╬╗ŽĄĮyį┌ī¦ÅŚųŲī¦ųąĄ─æ¬ė├Ż¼ėąųžę¬Ą─▄Ŗ╩┬ārųĄ║═¼FīŹęŌ┴xĪŻ
1 ī¦ÅŚ’wąąŁhŠ│(Ė▀äėæBŁhŠ│)ĮoĮė╩šGPSą┼╠¢Ä¦üĒĄ─å¢Ņ}╝░ĮŌøQĘĮ░Ė
ī¦ÅŚųŲī¦Ą─’@ų°╠ž³c╩Ūį┌Ė▀äėæBŁhŠ│ųąīŹ╩®▄ē█Eī¦ę²║═š`▓ŅąŻš²ĪŻčąŠ┐GPSį┌ųŲī¦ųąĄ─æ¬ė├▒žĒÜ蹊┐Ė▀äėæBŁhŠ│ĮoĮė╩šGPSą┼╠¢Ä¦üĒĄ─ė░ĒæĪŻļm╚╗GPSŽĄĮyŠ▀ėą▒╚ęį═∙ī¦║ĮČ©╬╗ŽĄĮy¤oĘ©▒╚öMĄ─įSČÓā׳cŻ¼Ą½╩Ū┼cņoæBĪóųąĄ═äėæBŁhŠ│ŽÓ▒╚Ż¼Ė▀äėæBŁhŠ│╩╣GPSą┼╠¢«a╔·┴╦▌^┤¾Ą─ČÓŲš└šŅlęŲŻ¼ĮoĮė╩šÖC┐╔┐┐▓Č½@║═Ė·█Öą┼╠¢Ä¦üĒ┴╦▌^┤¾Ą─└¦ļyĪŻŲš═©GPSĮė╩šÖCį┌ø]ėąæTī¦ŽĄĮy╦┘┬╩▌oų·Ą─Śl╝■Ž┬║▄ļyį┌Ė▀äėæBŁhŠ│Ž┬┐╔┐┐Ąž╣żū„ĪŻ
1.1 Ė▀äėæBŁhŠ│ĮoĮė╩šGPSą┼╠¢Ä¦üĒĄ─å¢Ņ}
┼cųąĪóĄ═äėæBŁhŠ│ŽÓ▒╚Ż¼Ė▀äėæBŁhŠ│ĮoĮė╩šGPSą┼╠¢Ä¦üĒ┴╦╚ńŽ┬å¢Ņ}Ż║
ó┘Ė▀äėæB╩╣GPS▌d▓©ą┼╠¢«a╔·▌^┤¾Ą─ČÓŲš└šŅlęŲŻ¼╚¶╩╣Ųš═©Įė╩šÖCĄ─▌d▓©µiŽÓŁhPLL(│Żė├costasŁh)─▄ē“▒Ż│ųµiČ©Ż¼Š═▒žĒÜį÷╝ėŁh┬Ę×V▓©Ų„Ą─ĦīÆĪŻ▀@śėŠ═Ģ■╩╣īÆĦįļ┬ĢĖZ╚ļŻ¼«öįļ┬ĢļŖŲĮį÷┤¾ĄĮ│¼▀^Łh┬ĘķTŽ▐ĢrŠ═Ģ■ų┬╩╣▌d▓©Ė·█ÖŁh╩¦µiĪŻČ°▌d▓©Ė·█Ö╠ß╣®Š½┤_Ą─ŠÓļxūā╗»┬╩£y┴┐ī¦║ĮĮŌŻ¼▀@śėŠ═Ģ■üG╩¦ŠÓļx║═ŠÓļxūā╗»┬╩Ą─╣└ėŗųĄŻ╗╚¶▓╗į÷╝ė▌d▓©µiŽÓŁhĄ─Łh┬ĘĦīÆŻ¼ät▌d▓©ČÓŲš└šŅlęŲ│Ż│ŻĢ■│¼▀^µiŽÓŁhĄ─▓Č½@ĦŻ¼▀@śėę▓▓╗─▄▒ŻūCī”▌d▓©Ą─┐╔┐┐▓Č½@║═Ė·█ÖĪŻ
ó┌Ė▀äėæBę▓╩╣Ą├GPSą┼╠¢Ą─Ė▒▌d▓©Ż¼╝┤é╬ļSÖC┤a«a╔·äėæBĢrčėŻ¼╩╣Ą├Ųš═©Įė╩šÖCĄ─DLL┤ačėĢrĖ·█ÖŁh╚▌ęū╩¦µiŻ¼Č°Ūęųžą┬▓Č½@Ģrķg║▄ķLŻ¼═∙═∙╩╣ī¦║ĮĮŌ░l╔óĪŻ
ó█▌d▓©Ė·█Ö╩¦µię▓╩╣50HzĄ─š{ųŲöĄō■¤oĘ©╗ųÅ═Ż¼ŽÓæ¬Ą─ąląŪąŪÜv¤oĘ©½@╚ĪĪŻ
Ųš═©Ą─GPSĮė╩šÖC┤¾Č╝▓╔ė├▌d▓©µiŽÓŁh▀Mąą▌d▓©Ė·█ÖĪó┤ačė▀tµiČ©Łh▀Mąą┤aĖ·█ÖŻ¼╚ń╣¹ø]ėąæTąįī¦║ĮŽĄĮyĄ─╦┘┬╩▌oų·(╝┤╠ß╣®ėąĻPČÓŲš└šŅlęŲĄ─Ž╚“×ų¬ūR)Ż¼╩Ū║▄ļyį┌Ė▀äėæBŁhŠ│Ž┬┐╔┐┐╣żū„Ą─ĪŻ
1.2 ĮŌøQĖ▀äėæBŁhŠ│╦∙ĦüĒå¢Ņ}Ą─Ąõą═ĘĮĘ©
ĮŌøQĖ▀äėæBŁhŠ│╦∙ĦüĒĄ─å¢Ņ}Ż¼ų„ę¬╩Ū蹊┐╚ń║╬╠ßĖ▀į┌Ė▀äėæBŁhŠ│ųąī”ČÓŲš└šŅlęŲĄ─┴╦ĮŌ│╠Č╚ĪŻčąŠ┐▒Ē├„Ż¼ČÓŲš└šŅlęŲę╗░Ń┐╔═©▀^─│ą®╦ŃĘ©▀MąąČÓŲš└šŅlęŲ╣└ėŗČ°šŲ╬šŻ¼╗“š▀═©▀^æTąįī¦║ĮŽĄĮyüĒ╠ß╚ĪĪŻ
1.2.1 Ė▀äėæBŁhŠ│ųąČÓŲš└šŅlęŲ╣└ėŗĘĮĘ©
į┌Ė▀äėæBŁhŠ│ųąī”ČÓŲš└šŅlęŲ╣└ėŗ╦ŃĘ©Ą─蹊┐ūŅįńę▓╩ŪūŅėą│╔┐āĄ─╩Ū├└ć°JPLīŹ“×╩ęŻ¼įōīŹ“×╩ęį°Įø蹊┐▀^ęįŽ┬╦ŃĘ©Ż║
ó┘Į³╦ŲūŅ┤¾╦Ų╚╗╣└ėŗ(MLE)Ą─Ė·█Ö║═▓Č½@╦ŃĘ©Ż¼įō╦ŃĘ©╩Ū╗∙ė┌NéĆ▀B└m═¼ŽÓ║═š²Į╗▓╔śėųĄüĒī”Ņl┬╩╝░ŲõĢrķgī¦öĄ▀Mąą╣└ėŗĄ─ĪŻ
ó┌▓╔ė├öUš╣┐©Ā¢┬³×V▓©╦ŃĘ©(EKF)Ż¼╝┤ę╗ĘN╩╣ė├£╩ūŅā×▀f═Ų╣└ėŗĮė╩šĄ─ŽÓ╬╗╝░Ņl┬╩Ė·█Ö╦ŃĘ©▀Mąą▌d▓©Ė·█ÖĪŻ
ó█Į╗▓µūįäėŅl┬╩┐žųŲŁh(CPAKC)Ż¼╝┤ę╗ĘN║å╗»Ą─╣└ėŗč═ø]ė┌įļ┬Ģųąš²Žęą┼╠¢Ņl┬╩▓óėąśOĖ▀äėæBĄ─£╩ūŅā×╦ŃĘ©ĪŻ
ó▄Ņl┬╩öUš╣┐©Ā¢┬³×V▓©Ų„(FEKF)Ż¼╝┤ę╗ĘNŽ╚ī”╚ź│²ŽÓ╬╗ė░Ēæ║¾Ą─öĄō■▀Mąą▓µĘeŻ¼į┘▀MąąĄ═╣Ø┤╬EKFĄ─Ņl┬╩╣└ėŗ╦ŃĘ©ĪŻ
į┌įOėŗĖ▀äėæBGPSĮė╩šÖCĢr┐╔ÖÓ║Ō╣żū„ķTŽ▐(Ņl┬╩╩¦µiĖ┼┬╩×ķ10%ĢrĄ─ą┼įļ▒╚)Īó▓╗═¼ą┼įļ▒╚ĢrĄ─Ņl┬╩š`▓ŅĪó╦ŃĘ©Å═ļs│╠Č╚ęį╝░ąĶŪ¾╠ž³cĄ╚ę“╦žŻ¼▀xō±║Ž▀mĄ─▌d▓©▓Č½@Ė·█Ö╦ŃĘ©ęįØMūŃĮė╩šÖCąį─▄║═ą┼╠¢╠Ä└ĒÅ═ļs│╠Č╚Ą─ę¬Ū¾ĪŻ
1.2.2 ═©▀^æTī¦▌oų·Č°½@╚ĪČÓŲš└šŅlęŲĄ─ĘĮĘ©
蹊┐▒Ē├„Ż¼īóGPSŽĄĮy║═─┐Ū░│Żė├æTī¦ŽĄĮy▀MąąĮM║Ž┐╔’@ų°į÷ÅŖŲš═©GPSĮė╩šÖCį┌Ė▀äėæBŁhŠ│Ž┬Ą─▀mæ¬─▄┴”Ż¼ŪęĮM║ŽĄ─Č©╬╗Š½Č╚├„’@╠ßĖ▀ĪŻ▀@╩Ūę“×ķīóā╔éĆŽĄĮyĄ─▌ö│÷ą┼Žó═©▀^┐©Ā¢┬³×V▓©Ų„▀MąąĮM║ŽŻ¼└¹ė├æTī¦╝ė╦┘Č╚ėŗĄ─╦┘┬╩öĄō■(░³║¼ČÓŲš└šŅlęŲą┼Žó)ū„×ķGPSĮė╩šÖC┤aĖ·█ÖŁh┬Ę║═▌d▓©Ė·█ÖŁh┬ĘĄ─▌oų·ą┼╠¢Ż¼į┌Ė▀äėæBŁhŠ│Ž┬Ż¼┐╔’@ų°ĮĄĄ═GPSĮė╩šÖCī”äėæBą┼╠¢Ė·█Ö─▄┴”Ą─ę¬Ū¾Ż¼Å─Č°╠ßĖ▀Ųõī”äėæBĄ─▀mæ¬─▄┴”║═┐╣Ė╔ö_─▄┴”ĪŻ┴Ē═ŌŻ¼«öę“Ė╔ö_║═ū╦æBūā╗»Č°üG╩¦GPSą┼╠¢ĢrŻ¼┤╦ĮM║ŽĘĮ╩Į▀ĆŠ▀ėą┐ņ╦┘ųž▓Č─▄┴”ĪŻ
2 įOėŗĖ▀äėæBGPSĮė╩šÖCĄ─ĻPµI╝╝ąg
¼FęįįOėŗĖ▀äėæBGPSĮė╩šÖC▀^│╠ųąė├ĄĮĄ─╝╝ąg╝ėęįšf├„ĪŻ╦∙įOėŗĄ─GPSĮė╩šÖC│²┴╦▓╔ė├Į³╦ŲūŅ┤¾╦Ų╚╗╣└ėŗ(MLE)╝╝ąg╣└╦ŃŠÓļx║═ŠÓļxūā╗»┬╩Ż¼Å─Č°į┌Ė▀äėæBŁhŠ│ųąīŹ¼F▌d▓©Ė·█Ö═ŌŻ¼▀Ć▓╔ė├┴╦šŁÄ¦ŽÓĻPŲ„╝╝ągĪóČÓąŪ╝╝ągĪó▌d▓©▌oų·╝╝ągĪó┐©Ā¢┬³×V▓©╝╝ąg║═▓ŅĘų╝╝ągüĒ╠ßĖ▀Č©╬╗Š½Č╚ĪŻŽ┬╬─ų„ę¬Ęų╬÷šŁÄ¦ŽÓĻPŲ„╝╝ągĪó▌d▓©▌oų·╝╝ąg║═ČÓąŪ╝╝ągŻ¼Ųõ╦¹╝╝ągęčČÓėąšō╩÷Ż¼▀@└’▓╗į┘╔µ╝░ĪŻ
é„ĮyĄ─GPSĮė╩šÖCį┌ī”é╬ļSÖC┤a▀MąąčėĢr▓Č½@Ė·█ÖĢrŻ¼Ųõ▀tįńŽÓĻPŲ„Č╝ė├1éĆ┤aŲ¼Ą─ķLČ╚ū„×ķčė▀tķgĖ¶Ż¼Ą½į┌ī”C/A┤aĖ·█ÖĢr▓╔ė├šŁŽÓĻPķgĖ¶(╚ń▓╔ė├1.0Ī½0.05┤aŲ¼ķLČ╚)Š▀ėą├„’@Ą─ā×įĮąįŻ¼┐╔į┌│÷¼Fįļ┬Ģ║═ČÓÅĮĖ╔ö_Ģr£pąĪĖ·█Öš`▓ŅĪŻę“×ķ┤aŽÓĻPŲ„ųą▀tįńą┼╠¢ųąĄ─įļ┬Ģ│╔Ęų╩ŪŽÓĻPĄ─Ż¼į┌▀Mąą▀tįń╠Ä└ĒĢrā╔š▀┌ģė┌ĄųŽ¹Ż╗ė╔ė┌PDLLĶbŽÓŲ„ųąĄ─ČÓÅĮą┼╠¢▌^╔┘┼żŪ·Č°ī¦ų┬ČÓÅĮą¦æ¬£pąĪŻ¼Å─Č°╠ßĖ▀Č©╬╗Š½Č╚ĪŻīŹ“×▒Ē├„Ż¼į┌C/A┤aĖ·█ÖŁh┬Ęųą▓╔ė├šŁķgĖ¶ŽÓĻPŲ„(ķgĖ¶×ķ0.1┤aŲ¼)Ż¼āH┐┐é╬ŠÓŪ¾ĮŌĄ─īŹĢrČ©╬╗Š½Č╚┐╔▀_ĄĮŻ╝1mŻ╗▌d▓©ŽÓ╬╗ŲĮ╗¼Ž┬Ą─┤aé╬ŠÓĮŌŠ½Č╚▀_0.5m╦«ŲĮĪŻį┌▒ŠšnŅ}ĘĮ░Ėųą▓╔ė├Ą─┤aŲ¼ķgŠÓ╩Ū0.5┤aŲ¼Č°▓╗╩Ū═©│ŻĄ─1┤aŲ¼ķgĖ¶ĪŻ
▌d▓©▌oų·╝╝ągęįā╔ĘNĘĮ╩Į▌oų·┤aŁhĖ·█ÖĪŻė╔ė┌┤aŽÓ┬╩┼c▌d▓©ŽÓ╬╗┬╩│╔š²▒╚Ż¼└¹ė├┐╔½@Ą├Ą─▌dŅl(ČÓŲš└šŅlęŲ)┐žųŲC/A┤aĄ─öĄ┐žš±╩ÄŲ„Ż¼╩╣ų«ī”äėæB▓╗├¶ĖąŻ¼Å─Č°╠ßĖ▀£y┤aé╬ŠÓĄ─Š½Č╚Ż╗┴Ēę╗ĘĮ├µŻ¼«ö▌d▓©ŽÓ╬╗š²┤_ĘeĘųĢrŻ¼Ųõūā╗»š²▒╚ė┌ąląŪé╬ŠÓūā╗»╝┤ΔŠÓļxŻ¼ę“┤╦┐╔└¹ė├ΔŠÓļxüĒŲĮ╗¼é╬ŠÓįļ┬ĢĪŻ
ČÓąŪ╝╝ąg╝┤ČÓ═©Ą└╝╝ągĪŻ╩┬īŹ╔Ž═©Ą└öĄ─┐Ą─į÷╝ė┐╔½@Ą├’@ų°Ą─ąį─▄╠ßĖ▀Ż¼ę“×ķ▓╗═¼Ą─ąląŪöĄ─┐įĮČÓČ©╬╗Š½Č╚įĮĖ▀ĪŻ▀@ų„ę¬▒Ē¼Fį┌ąląŪöĄ─┐į÷╝ėę╗▒ČĢrČ©╬╗įļ┬Ģ┐╔ĮĄĄ═3dBĪŻ┴Ē═ŌŻ¼12═©Ą└ŽĄĮyīŹ┘|╔ŽŪÕ│²┴╦ā×╗»▀xąŪĄ─¤®¼ŹŻ¼▓ó×ķ┼╝╚╗Ą─ą┼╠¢üG╩¦╠ß╣®┴╦ę╗éĆ║åĮ▌Ą─╠Ä└ĒĘĮĘ©Ż¼12═©Ą└ŽĄĮyį┌└õåóäė─Ż╩ĮŽ┬▀ĆŠ▀ėąę╗éĆūŅ┤¾Ą─ā׳cŻ¼╝┤┐╔ī”ąląŪą┼╠¢▀Mąą├ż╦č╦„ĪŻ
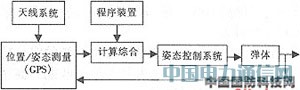
─┐Ū░╬ęéāįOėŗ┴╦ę╗ĘN─ŻēK╩Į▓óąą12═©Ą└Ė▀äėæBGPSĮė╩šÖCŻ¼īŹ¼F┐“łD╚ńłD1╦∙╩ŠĪŻŲõ╗∙▒ŠįOėŗįŁ└Ē╩ŪīóĮė╩šĄĮĄ─GPS╔õŅlą┼╠¢═©▀^Ū░ų├×V▓©─ŻēK×V│²Ä¦═ŌĖ╔ö_Ż¼╚╗║¾į┌╔õŅlŪ░Č╦─ŻēKųąūāŅlĄĮųąŅlą┼╠¢Ż¼į┘į┌ą┼╠¢╠Ä└Ē─ŻēKųą┼cā╚▓┐«a╔·Ą─▌d▓©╝░é╬ļSÖC┤aŽÓĻPŻ¼╗ųÅ═╗∙Ħą┼╠¢▓ó½@Ą├Č©╬╗ĮŌ╦Ń╦∙ąĶĄ─é╬┤a║═▌d▓©ė^£y┴┐ĪŻįōĮė╩šÖC═©▀^▓╔ė├Į³╦ŲūŅ┤¾╦Ų╚╗╣└╦Ń(MLE)ĘĮĘ©üĒ╣└╦ŃĮė╩šÖCŽÓī”ąląŪĄ─é╬ŠÓļx║═ŠÓļxūā╗»┬╩Ż¼ęį┤╦ØMūŃį┌Ė▀äėæBŁhŠ│ųąī”é╬┤a║═▌d▓©Ņl┬╩Ą─Ė·█ÖŻ╗═©▀^▓╔ė├DSP╝╝ągįOėŗ┴╦ØMūŃĖ▀äėæBĖ·█Ö╦∙ąĶĄ─Ė·█Ö×V▓©Ų„Ż╗į┌╔õŅlŪ░Č╦▓╔ė├┴╦Ą═įļ┬ĢĘ┼┤¾Ų„üĒ▒ŻūCGPSĮė╩šÖCį┌▌^Ą═ą┼įļ▒╚Ž┬┐╔┐┐Ė·█ÖąląŪą┼╠¢Ż╗═©▀^▓╔ė├▓óąą12═©Ą└─ŻēK╗»įOėŗ╝░╠ßĖ▀Č©╬╗Š½Č╚Ą─ŽÓĻP╝╝ągŻ¼╩╣Ą├Įė╩šÖCŠ▀ėą┴╝║├Ą─įļ┬Ģąį─▄║═äėæBąį─▄Ż¼▓óėąą¦Ąž╠ßĖ▀┴╦Č©╬╗Š½Č╚ĪŻįōĮė╩šÖC┐╔ęį▌^║├Ąžį┌ø]ėąæTī¦▌oų·Ą─ī¦ÅŚĪó▄Ŗė├’wÖCĄ╚Ė▀äėæBė├æ¶▌d¾w╔Ž╣żū„ĪŻ
łD1 Ė▀äėæBGPSĮė╩šÖCīŹ¼F┐“łD
3 GPSį┌ī¦ÅŚųŲī¦ĘĮ├µĄ─æ¬ė├
蹊┐▒Ē├„Ż¼└ĒŽļĄ─ī¦ÅŚųŲī¦ŽĄĮyæ¬ØMūŃ╚ńŽ┬ę¬Ū¾Ż║╚½Ū“Ė▓╔wŻ╗Ė▀Ą─ŽÓī”Š½Č╚║═Į^ī”Š½Č╚Ż╗ī”Ė▀äėæB▌d¾wŠ▀ėą┴╝║├Ą─īŹĢr▀mæ¬─▄┴”Ż╗─▄ē“╠ß╣®╚²ŠS╬╗ų├Īó╚²ŠS╦┘Č╚║═ū╦æBöĄō■Ż╗╣żū„▓╗╩▄═Ō▓┐ŁhŠ│ė░ĒæŻ╗Š▀ėą┐╣╚╦×ķ║═ĘŪ╚╦×ķĖ╔ö_Ą──▄┴”Ż╗▓╗▒╗╦¹ĘĮ└¹ė├Ż╗┐╔╣®╬ęĘĮÅV┤¾ė├æ¶╩╣ė├Ż╗─▄ļSĢrĪóūįų„Ąž▀Mąą╣╩šŽÖz£y║═╣╩šŽ┼┼│²Ż╗Ė▀Ą─┐╔┐┐ąįŻ╗┼c¼FąąÖC▌dįOéõĄ─ęÄĘČę¬Ū¾ŽÓĘ¹Ż╗ārĖ±▀mųąŻ¼×ķÅV┤¾ė├æ¶╦∙Įė╩▄Ą╚Ą╚ĪŻ─┐Ū░Ż¼ī¦ÅŚųŲī¦ŽĄĮy┤¾Č╝▓╔ė├æTąįųŲī¦ŽĄĮy(INS)Ż¼▀@ĘNŽĄĮyė╔ė┌┤µį┌š`▓ŅļSĢrķgČ°Ęe└█Ą─╣╠ėą╚▒³cŻ¼╦∙ęį║▄ļyØMūŃĖ▀Š½Č╚ĪóĖ▀┐╔┐┐ąįĄ╚ųŲī¦ŽĄĮyĄ─ę¬Ū¾ĪŻčąŠ┐▒Ē├„Ż¼į┌ė░Ēæī¦ÅŚųŲī¦Š½Č╚Ą─š`▓Ņę“╦žųąŻ¼æTī¦āx▒ĒĄ─£y┴┐š`▓Ņ╩Ūų„꬚`▓Ņį┤ĪŻĶbė┌ųŲī¦ŽĄĮyĄ─ę¬Ū¾ęį╝░æTī¦ŽĄĮyĄ─╣╠ėą╚▒Ž▌Ż¼─┐Ū░╠ßĖ▀ųŲī¦ŽĄĮyŠ½Č╚ę╗░Ńėąā╔Śl═ŠÅĮŻ║▓╔ė├ą┬Ą─ųŲī¦ŽĄĮy║══Ļ╔Ų¼FėąĄ─æTī¦ŽĄĮyĪŻ
3.1 Ė▀äėæBGPSĮė╩šÖCį┌ī¦ÅŚųŲī¦ųąæ¬ė├
▓╔ė├ą┬Ą─ųŲī¦╝╝ąg╩ŪųŲī¦ŅIė“ę╗ų▒ĻPūóĄ─å¢Ņ}Ż¼ļSų°GPS▀@ę╗╚½Ū“ąląŪČ©╬╗ŽĄĮyĄ─Į©│╔Ż¼╗∙ė┌GPSŽĄĮyĄ─ą┬ą═ųŲī¦ŽĄĮy┐╔ęį▌^║├ĄžØMūŃī¦ÅŚųŲī¦Ą─ųTĒŚę¬Ū¾Ż¼ė├GPSųŲī¦ŽĄĮyüĒ╠µōQ¼FėąĄ─æTī¦ŽĄĮyŻ¼īŹ¼Fī¦ÅŚĄ─ķLŠÓļxĪóĖ▀Š½Č╚ųŲī¦ęčę²ŲįĮüĒįĮČÓĄ─ĻPūóĪŻ
ė├Ė▀äėæBGPSĮė╩šÖC▀Mąąī¦ÅŚųŲī¦ąĶę¬ĮŌøQĄ─ā╔éĆĻPµIå¢Ņ}╩ŪŻ║GPS╚½Ž“╠ņŠĆĄ─蹊┐║═╗∙ė┌GPS╝╝ągĄ─ī¦ÅŚū╦æB£y┴┐ĘĮʩ蹊┐ĪŻ▀@ā╔ĒŚčąŠ┐ęčėą╦∙═╗ŲŲŻ¼▀@└’▓╗į┘┘ś╩÷ĪŻłD2╩Ū╗∙ė┌Ė▀äėæBGPSĮė╩šÖCĄ─ī¦ÅŚųŲī¦ŽĄĮyĮM│╔┐“łDĪŻŲõ╗∙▒Š╣żū„įŁ└Ē╩ŪŻ║ė╔GPSĮė╩šÖC£y┴┐│÷ī¦ÅŚĄ─īŹĢr╬╗ų├▓ó┼c┤µā”į┌│╠ą“čbų├ųąĄ─ŅAČ©▄ēĄ└ģóöĄ▀Mąą▒╚▌^║═ėŗ╦ŃŠC║ŽŻ¼╚╗║¾═©▀^ū╦æB┐žųŲŽĄĮy┐žųŲÅŚ¾w▀\äėŻ╗Č°ī¦ÅŚĄ─ū╦æBą┼Žóę▓═©▀^GPSĮė╩šÖCīŹĢr▒O£yŻ¼▓ó▀mĢr┐žųŲī¦ÅŚ▀Mąąš{š¹Ż¼š¹éĆųŲī¦ŽĄĮy╩Ūę╗éĆķ]ŁhŽĄĮyŻ¼ūŅĮKīóī¦ÅŚę²Ž“─┐ś╦ĪŻ
łD2 ╗∙ė┌Ė▀äėæBGPSĮė╩šÖCĄ─ī¦ÅŚųŲī¦ŽĄĮyĮM│╔┐“łD
3.2 GPS║═æTī¦ĮM║ŽĄ─ųŲī¦ĘĮĘ©
═Ļ╔Ų¼FėąĄ─æTī¦ŽĄĮyŠ═▒žĒÜ£pąĪæTī¦āx▒ĒĄ─╣żŠ▀š`▓ŅĪŻ─┐Ū░═©▀^╠ßĖ▀æTī¦āx▒Ē┘|┴┐Č°£pąĪ╣żŠ▀š`▓ŅĄ─ĘĮĘ©įĮüĒįĮ└¦ļyŻ╗Č°▓╔ė├ĮM║ŽųŲī¦╝╝ągüĒą▐š²╣żŠ▀š`▓ŅĄ─ĘĮĘ©ų▄Ų┌Č╠Īó│╔▒ŠĄ═Ż¼ļSų°GPS╝╝ągĄ─│÷¼FŻ¼▀@ĘNĘĮĘ©įĮüĒįĮ╩▄ĄĮųžęĢĪŻ
Ųš═©Ą─GPSĮė╩šÖCį┌Ė▀äėæBŁhŠ│▓╗ęū▓Č½@║═Ė·█Öą┼╠¢Ż¼╔§ų┴«a╔·š¹ų▄╠°ūā¼FŽ¾Ż╗Č°æTī¦ŽĄĮy┐╔īŹĢr╠ß╣®ČÓĘNī¦║Įą┼ŽóŻ¼Ą½Ųõī¦║Įš`▓ŅĢ■ļSĢrķgČ°Ęe└█Ż¼ė░ĒæųŲī¦ą¦╣¹ĪŻGPS/INSĮM║ŽųŲī¦ŽĄĮy╩╣Ą├ą┬ŽĄĮy╝╚Š▀ėąæTī¦ŽĄĮy▌^Ė▀Ą─ŽÓī”Š½Č╚Ż¼ėųŠ▀ėąGPS▌^Ė▀Ą─Į^ī”Š½Č╚Ż¼▓ó╚▌ęū╠ß╣®▌d¾wĄ─ū╦æBą┼ŽóĪŻė├GPS▀B└m╠ß╣®Ą─Ė▀Š½Č╚╬╗ų├║═╦┘Č╚ą┼Žó┐╔ęį╣└ėŗ║═ąŻš²æTī¦ŽĄĮyĄ─╬╗ų├š`▓ŅĪó╦┘Č╚š`▓ŅŻ¼Å─Č°’@ų°╠ßĖ▀æTī¦ŽĄĮyĄ─Č©╬╗Š½Č╚Ż╗Č°ĮĶų·æTī¦ŽĄĮyĄ─╝ė╦┘Č╚ėŗ╦┘┬╩ą┼ŽóŻ¼┐╔Ė─╔ŲGPSĮė╩šÖCĄ─äėæBąį─▄Ż¼╩╣GPSĮė╩šÖC─▄ē“į┌Ė▀äėæBŁhŠ│┐ņ╦┘▓Č½@║═ųžą┬▓Č½@ąląŪą┼╠¢ĪŻę“┤╦Ż¼GPS║═INSĄ─ĮM║Ž┐╔ęįśŗ│╔šµš²└ĒŽļĄ─ųŲī¦ŽĄĮyĪŻæTī¦┼cGPSĄ─ĮM║ŽĘĮ╩Įę╗░Ń┐╔ęįĘų×ķā╔┤¾ŅÉŻ║ųžš{╩Į║═┐©Ā¢┬³×V▓©ĘĮ╩ĮĪŻ
ųžš{╩Į╩Ū║åå╬Ą─ĮM║ŽĘĮ╩ĮĪŻīŹ┘|╔ŽŻ¼▀@ĘNĮM║Žų╗╩ŪGPSŽ“æTī¦å╬ĘĮŽ“Ą─ąŻ£╩Ż¼ļm╚╗ėą║åå╬Īóęūė┌īŹ¼FĄ─ā׳cŻ¼Ą½ĮM║ŽĄ─Øō─▄▀hø]ėą░lō]│÷üĒĪŻ
į┌┐©Ā¢┬³×V▓©ĘĮ╩Įųą▓╔ė├┴╦ĮM║Žī¦║Į×V▓©Ų„(īŹ┘|╔Ž╩Ūę╗ĘN┐©Ā¢┬³×V▓©Ų„)Ż¼═©▀^╣└ėŗæTī¦āx▒ĒĄ─š`▓ŅĖ─╔ŲæTī¦ŽĄĮyĄ─Č©╬╗Š½Č╚Ż╗╚ń╣¹æTī¦Ą─╦┘┬╩öĄō■ū„×ķGPSĮė╩šÖC┤aĖ·█ÖŁh┬Ę║═▌d▓©Ė·█ÖŁh┬ĘĄ─▌oų·ą┼ŽóŻ¼į┌Ė▀äėæBŁhŠ│Ž┬┐╔ĮĄĄ═GPSĮė╩šÖCī”äėæBą┼╠¢Ė·█Ö─▄┴”Ą─ę¬Ū¾Ż¼Å─Č°╠ßĖ▀┐╣Ė╔ö_ąį─▄ĪŻ┴Ē═ŌŻ¼«öę“Ė╔ö_║═ū╦æBūā╗»üG╩¦┴╦GPSą┼╠¢Ż¼┤╦ĮM║ŽĘĮ╩Į▀ĆŠ▀ėą┐ņ╦┘ųž▓Č─▄┴”ĪŻłD3×ķĄõą═Ą─GPS/INSĮM║ŽŽĄĮyĄ─ĮYśŗłDĪŻ
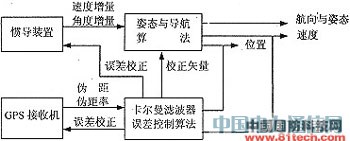
łD3 Ąõą═Ą─GPS/INSĮM║ŽŽĄĮyĄ─ĮYśŗłD
GPS║═INSĮM║ŽųŲī¦(ī¦║Į)ŽĄĮyŻ¼╝µŅÖ┴╦ā╔ŽĄĮyĄ─ā׳cŻ¼ęųųŲ┴╦ā╔ĘųŽĄĮyĄ─▓╗ūŃŻ¼Ūęį÷╝ė┴╦ŽĄĮyĄ─╚▀ėÓČ╚Ż¼ŽÓæ¬╠ßĖ▀┴╦▌d¾wĄ─ī¦║Į╗“ųŲī¦Š½Č╚Ż¼╩Ū▌^×ķ└ĒŽļĄ─ĮM║ŽųŲī¦(ī¦║Į)ŽĄĮyĪŻ
4 ĮYšō
¼FėąĄ─æTąįųŲī¦ŽĄĮy▓╗─▄│õĘųØMūŃī¦ÅŚŠ½├▄ųŲī¦Ą─ąĶ꬯¼Č°╗∙ė┌GPS╝╝ągĄ─¼F┤·ųŲī¦ŽĄĮyŠ▀ėąįSČÓæTąįųŲī¦ŽĄĮy¤oĘ©▒╚öMĄ─ā׳cŻ¼ėąÅVķ¤Ą─░lš╣Ū░Š░ĪŻ





