š¬ę¬Ż║Ė∙ō■ĘŪŠĆąįŽĄĮy└¹ė├Ū░üŠWĮjĄ─║»öĄ▒ŲĮ³─▄┴”Ż¼įOėŗ┴╦ę╗ĘN╔±ĮøŠWĮjė^£yŲ„Ż¼▓ó└¹ė├ŠWĮjÖÓųĄąŻš²Ę©Ż¼Į©┴óLyapunov║»öĄī”ė^£yŲ„Ą─ĘĆČ©ąį▀Mąą┴╦Ęų╬÷ĪŻ×ķ┴╦╝ė┐ņė¢ŠÜ╦┘Č╚Ż¼į┌ė¢ŠÜŠWĮjĢr▓╔ė├LMā×╗»╦ŃĘ©üĒīŹ¼FŻ¼Ę┬šµĮY╣¹▓╗āHūC├„┴╦╦∙įOėŗĄ─╔±ĮøŠWĮjė^£yŲ„Ą─ėąą¦ąįŻ¼▀ĆūCīŹ┴╦╔±ĮøŠWĮjĖ─▀M╦ŃĘ©║¾Ą─ā×įĮąįĪŻ
Į³─ĻüĒŻ¼Ķbė┌╔±ĮøŠWĮjĄ─╠žąį║═░lš╣Øō┴”Ż¼╔±ĮøŠWĮj│╔×ķ蹊┐Ą─¤ß³cų«ę╗ĪŻ░ķļSų°┐žųŲī”Ž¾Å═ļsąįĄ─╠ßĖ▀Ż¼ŽĄĮy┤µį┌Ą─▓╗┤_Č©ę“╦ž║═ļyęį┤_Ūą├Ķ╩÷Ą─ĘŪŠĆąį╠žąįę▓ļSų«į÷ČÓŻ¼╔±ĮøŠWĮjĄ─蹊┐║═░lš╣’@Ą├ė╚×ķųžę¬ĪŻ┼cé„Įy┐žųŲŽĄĮyĀŅæBė^£yŲ„ŽÓ▒╚Ż¼╔±ĮøŠWĮjĀŅæBė^£yŲ„Š▀ėąĖ³ÅŖĄ─▒ŲĮ³ĘŪŠĆąį║»öĄĄ──▄┴”║═╚▌ÕeąįŻ¼ė╚Ųõ▀mė├ė┌ČÓ▌ö╚ļČÓ▌ö│÷ŽĄĮyĪŻ
┼cŠĆąįČ©│ŻŽĄĮyųąĄ─įOėŗ[2]ŽÓ▒╚Ż¼▒Š╬─╩Ūį┌ĘŪŠĆąįŽĄĮyųą└¹ė├Ū░ü╔±ĮøŠWĮjĄ─║»öĄ▒ŲĮ³─▄┴”Ż¼įOėŗ│÷┴╦ę╗ĘN╔±ĮøŠWĮjė^£yŲ„Ż¼▓óī”ė^£yŲ„Ą─ĘĆČ©ąį▀Mąą┴╦Ęų╬÷ĪŻ▒Š╬─▓╔ė├┴╦LMā×╗»╦ŃĘ©üĒĖ─▀MBPŠWĮjŻ¼ė╔ė┌Ųõ╦ŃĘ©┐╔ęį▒╚ś╦£╩╠▌Č╚Ž┬ĮĄĘ©ŠWĮjė¢ŠÜ╦┘Č╚╠ßĖ▀Äū╩«╔§ų┴╔Ž░┘▒Č[3]Ż¼Å─Č°┤¾┤¾╠ßĖ▀┴╦╣żū„ą¦┬╩ĪŻĘ┬šµĮY╣¹šf├„┴╦įOėŗĄ─║Ž└Ēąį║═ėąą¦ąįĪŻ
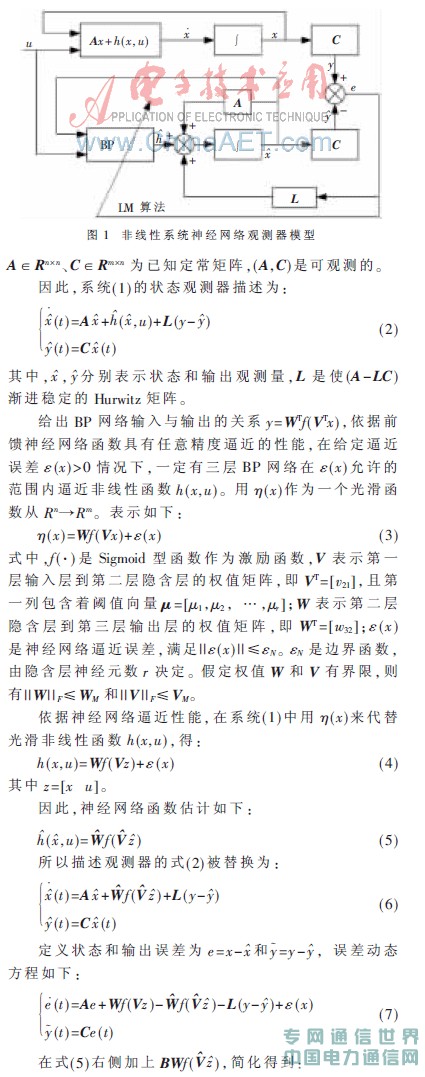
1 ė^£yŲ„įOėŗįŁ└Ē
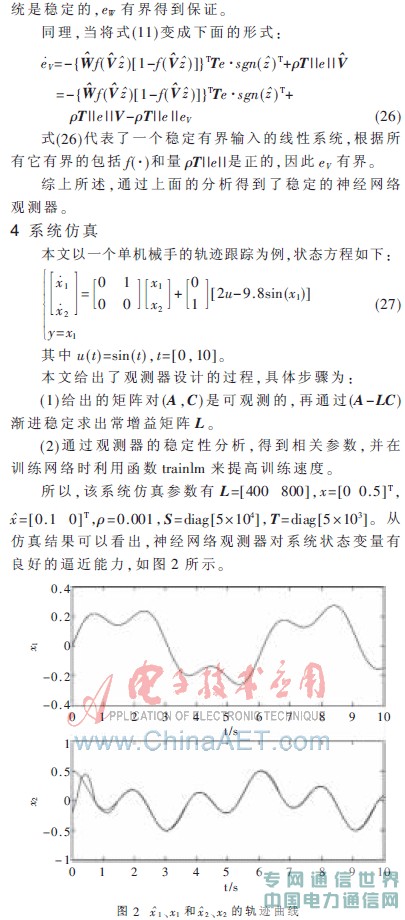
╔±ĮøŠWĮjė^£yŲ„Ą─įŁ└Ē┼cé„ĮyĀŅæBė^£yŲ„ŽÓ╦ŲŻ¼Č╝╩Ū└¹ė├ųžśŗĄ─╦╝ŽļĪŻ╔±ĮøŠWĮjĄ─ų„ę¬ū„ė├╩ŪüĒ▒ŲĮ³ŽĄĮyųąĄ─ĘŪŠĆąį║»öĄĪŻ╩ūŽ╚īó▌ö╚ļ┴┐uĪóĀŅæBūā┴┐xū„×ķBP╔±ĮøŠWĮjĄ─▌ö╚ļŻ¼ī”╔±ĮøŠWĮj▀Mąąė¢ŠÜŻ¼╩╣Ųõ▒ŲĮ³ĘŪŠĆąį║»öĄh(xŻ¼u)Ż╗╚╗║¾īóė¢ŠÜ║├Ą─ŠWĮjė├ė┌śŗ│╔ė^£yŲ„Ż¼▓ó═©▀^╔±ĮøŠWĮjė^£yŲ„Ą─▌ö│÷y┼cįŁüĒŽĄĮyĄ─▌ö│÷yĄ─▓ŅųĄüĒ┤_Č©š{š¹BPŠWĮjĄ─ÖÓųĄŻ¼╩╣Ųõ½@Ą├Žļꬥ─ĀŅæB╣└ėŗūā┴┐xĪŻŽĄĮyų╗ėąy┐╔ęįų▒Įė£y┴┐ĪŻ
įOėŗę╗éĆ╔±ĮøŠWĮjė^£yŲ„ĻPµI╩Ūšęę╗éĆ╔±ĮøŠWĮj╚źūRäeĘŪŠĆąįŻ¼▓óŪę└¹ė├é„ĮyĄ─ė^£yŲ„╦╝Žļ╚źųžśŗĀŅæBĪŻę“┤╦Ż¼╔±ĮøŠWĮjė^£yŲ„─Żą═╚ńłD1╦∙╩ŠĪŻ
2 ╔±ĮøŠWĮjĘŪŠĆąįŽĄĮyė^£yŲ„Ą─Į©┴ó
ĮoČ©╚ńŽ┬Ą─ĘŪŠĆąįŽĄĮyŻ║
▒Š╬─į┌ĘŪŠĆąįŽĄĮyŽ┬Į©┴ó┴╦╔±ĮøŠWĮjė^£yŲ„Ż¼ŲõŠ▀ėą║▄║├Ą─▒ŲĮ³ĘŪŠĆąį║»öĄĄ──▄┴”ĪŻĘ┬šµĮY╣¹šf├„┴╦Ųõėąą¦ąįĪŻ
ģó┐╝╬─½I
[1] ų▄¢|╚AŻ¼╚~Ńyųę. ¼F┤·╣╩šŽį\öÓ┼c╚▌Õe┐žųŲ[M]. ▒▒Š®:ŪÕ╚A┤¾īW│÷░µ╔ńŻ¼2000.
[2] ╠’Į©▒°Ż¼ÓŹĻ╔. ╗∙ė┌╔±ĮøŠWĮjĄ─ĀŅæBė^£yŲ„įOėŗ[J]. ÖCąĄ╣ż│╠┼cūįäė╗»Ż¼2008Ż¼16(3)Ż║22-25.
[3] Ė▀č®∙iŻ¼ģ▓╦¼. BPŠWĮjĖ─▀M╦ŃĘ©Ą─ąį─▄ī”▒╚蹊┐[J]. ┐žųŲ┼cøQ▓▀Ż¼2001Ż¼16(2)Ż║167-172.
[4] LAKHALANŻ¼TLILIASŻ¼BRAIEKNB. Neural network observer for nonlinear systems application to induction motors[J]. International Journal of Control and AutomationŻ¼2010Ż¼3(1).
[5] ABDOLLAHI FŻ¼TALEBI HA. A stable neural network observe-based observer with application to flexible joint manipulators[J]. IEEE Transaction on Neural Network. 2006(1)Ż║118-129.
[6] ╬õ║Ļ韯¼┤„Łé║ŻŻ¼═§ŲšŻ¼Ą╚. ╗∙ė┌╔±ĮøŠWĮjĄ─ĘŪŠĆąįŽĄĮyĄ─ė^£yŲ„įOėŗ[J]. ŪÕ╚A┤¾īWīWł¾Ż¼2000Ż¼40(3)Ż║11-15.
[7] ģ▓╦¼. ├µŽ“MATLAB╣żŠ▀ŽõĄ─╔±ĮøŠWĮj└Ēšō┼cæ¬ė├[M]. ▒▒Š®:ųąć°┐ŲīW╝╝ąg│÷░µ╔ńŻ¼2009.





