š¬ę¬Ż║į┌ėą▄ēÖC▄ćūįäė┐žųŲųąŻ¼ąĶę¬ī”ęŲäėÖC▄ć╬╗ų├▀MąąŠ½┤_£y┴┐Ż¼×ķ┤╦įOėŗ┴╦ę╗╠ūĖąæ¬¤oŠĆ╬╗ų├Öz£yŽĄĮyĪŻįōŽĄĮy╩Ū╗∙ė┌ļŖ┤┼Ėąæ¬įŁ└ĒŻ¼═©▀^Öz£y╠ņŠĆŽõŠĆ╚”┼cŠÄ┤aļŖ└|Ą─Ėąæ¬ļŖäėä▌ŽÓ╬╗║═Ę∙Č╚Ż¼Ą├ĄĮęŲäėÖC▄ćĄ─╬╗ų├ĪŻĮķĮB┴╦Ėąæ¬¤oŠĆ╬╗ų├Öz£yŽĄĮyĄ─╗∙▒Š┐“╝▄Ż¼ĻU╩÷┴╦ŽĄĮy╗∙▒Š╣żū„įŁ└ĒŻ¼═Ųī¦┴╦╬╗ų├Öz£y╣½╩ĮŻ¼įOėŗ┴╦╬╗ų├Öz£yļŖ┬Ę─Żą═Ż¼▓ó▀Mąą┴╦¤oŠĆĖąæ¬╬╗ų├Öz£yīŹ“×ĪŻĮY╣¹▒Ē├„Ż║Ėąæ¬¤oŠĆ╬╗ų├Öz£yŽĄĮyÖz£yŠ½Č╚Ė▀Ż¼┐╣Ė╔ö_─▄┴”ÅŖŻ¼┐╔ØMūŃęŲäėÖC▄ćŠ½┤_Č©╬╗Ą─ę¬Ū¾ĪŻ
0 ę²čį
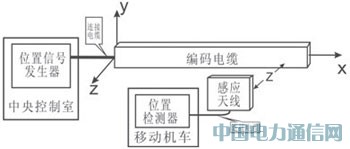
╣żśIū„śIÖC▄ćĄ─ūįäėČ©╬╗╩ŪÖC▄ćūįäė╗»▓┘ū„Ą─╗∙ĄAŻ¼╦³ę¬Ū¾Öz£yčbų├─▄Š½┤_Īó┐ņ╦┘Īó┐╔┐┐ĄžÖz£yÖC▄ćąąū▀╬╗ų├ĪŻĖąæ¬¤oŠĆ╝╝ąg╩ŪČ■╩«╩└╝oŲ▀╩«─Ļ┤·─®į┌╚š▒Š░lš╣ŲüĒĄ─ę╗ĒŚą┬Ą─╣żśIæ¬ė├╝╝ągŻ¼ų„ę¬╩Ūßśī”╣żśI╔·«aųą┤¾ą═ęŲäėÖC▄ćĄ─ūįäė╗»Č°čąųŲĄ─ĪŻĖąæ¬¤oŠĆ╬╗ų├Öz£y╩Ū═©▀^░▓čbį┌ęŲäėÖC▄ć╔ŽĄ─╠ņŠĆŽõųąĄ─Ėąæ¬ŠĆ╚”┼cĘ¾įOį┌Ąž├µ▄ēĄ└┼įĄ─ŠÄ┤aļŖ└|ųąé„▌öī”ŠĆų«ķgĄ─ļŖ┤┼Ėąæ¬Ż¼Öz£yĖąæ¬ą┼╠¢Ą─ŽÓ╬╗┼cĘ∙Č╚Ż¼Å─Č°Ą├ĄĮęŲäėÖC▄ćĄ─╬╗ų├ĪŻĖąæ¬¤oŠĆ╬╗ų├Öz£yĄ─╠ž³c╩ŪųžÅ═ąį║├ĪóÖz£yŠ½Č╚Ė▀Īó░▓╚½ąį║├Īó▀mė├ąįÅŖĪó┐╣Ė╔ö_ąįÅŖĪó┐╔┐┐ąįĖ▀ĪŻ
1 Ėąæ¬¤oŠĆ╬╗ų├Öz£yŽĄĮy┐é¾wĮYśŗ
ūįäė┐žųŲŽĄĮyųąŻ¼▒žĒÜĮŌøQā╔éĆ╗∙▒Šå¢Ņ}Ż║a.┐žųŲ║═╩▄┐žļpĘĮ┐╔┐┐Ą─öĄō■═©ą┼Ż╗b.ęŲäėÖC▄ć╦∙į┌╬╗ų├Ą─╬╗ų├Öz£yĪŻĖąæ¬¤oŠĆ╬╗ų├Öz£yŽĄĮyŻ¼īóĖąæ¬¤oŠĆöĄō■═©ą┼║═╬╗ų├Öz£y╚┌║Žį┌ę╗éĆŽĄĮyųąŻ¼╦³ė╔╬╗ų├ą┼╠¢░l╔·Ų„ĪóŠÄ┤aļŖ└|ĪóĖąæ¬╠ņŠĆĪó╬╗ų├Öz£yŲ„ĮM│╔ĪŻŲõųąĖąæ¬╠ņŠĆŽõ░▓čbį┌ęŲäėÖC▄ć╔ŽļSÖC▄ćęŲäėŻ¼Ūę╩╝ĮK┼cŠÄ┤aļŖ└|▒Ż│ųŠÓļxzŻ╗ŠÄ┤aļŖ└|▓┐Ęųė╔ŠÄ┤aļŖ└|Īó▀BĮėļŖ└|ĪóŲź┼õūĶ┐╣śŗ│╔ĪŻĖąæ¬¤oŠĆ╬╗ų├Öz£yŽĄĮy┐“łD╚ńłD1╦∙╩ŠĪŻ
łD1 Ėąæ¬¤oŠĆ╬╗ų├Öz£yŽĄĮy┐“łD
2 Ėąæ¬¤oŠĆ╬╗ų├Öz£yĘĮʩ蹊┐
2.1 APDÖz£y
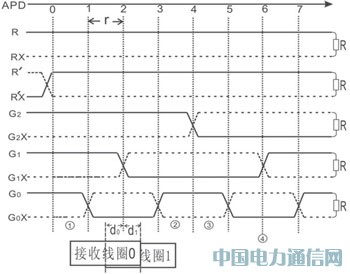
ę╗░Ń╬╗ų├Öz£yŻ©APDŻ®įŁ└ĒŻ║ųą┐ž╩꥞├µŠų░┤ę╗Č©Ēśą“Ż¼ĘųĢrŽ“ŠÄ┤aļŖ└|ųąĖ„Öz£y╬╗ų├é„▌öī”ŠĆ░l╦═▌d▓©ą┼╠¢Ż¼╠ņŠĆŽõųąĄ─Ėąæ¬ŠĆ╚”ū„Įė╩šŠĆ╚”Ż¼ęŲäėÖC▄ć╔ŽĄ─╬╗ų├Öz£yŲ„Öz£yĮė╩šŠĆ╚”╩šĄĮĄ─▌d▓©ą┼╠¢Ż¼▀MČ°Ą├ĄĮĮė╩šŠĆ╚”Ą─╬╗ų├ĪŻAPDÖz£yĮYśŗŲĮõüłD╚ńłD2╦∙╩ŠĪŻ
łD2 APDÖz£yĮYśŗŲĮõüłD
į┌t0Īót1Īót2Īót3Īót4ĢrķgČ╬Ż¼ĘųäeŽ“é„▌öī”ŠĆRĪóR’ĪóG2ĪóG1ĪóG0░l╦═▌d▓©ą┼╠¢Ż¼į┌t5ĢrķgČ╬▓╗░l╦═ĪŻ▄ć╔Ž╠ņŠĆŽõųąėąā╔éĆĮė╩šŠĆ╚”Ż║Įė╩šŠĆ╚”0║═Įė╩šŠĆ╚”1ĪŻAPDÖz£y╩ŪÅ─Įė╩šŠĆ╚”0Ėąæ¬ą┼╠¢Ą─ŽÓ╬╗ųąĄ├ĄĮAPD╬╗ų├ĪŻį┌t0ĢrķgČ╬Ż¼ŠĆ╚”0Ėąæ¬Ą─╩ŪRŠĆ░l╦═Ą─ą┼╠¢Ż¼ĘQ×ķRą┼╠¢Ż╗į┌t1ĢrķgČ╬Ż¼ŠĆ╚”0Ėąæ¬Ą─╩ŪR’ą┼╠¢Ż¼R’ą┼╠¢┼cRą┼╠¢Ę┤ŽÓŻ¼ėø×ķ=1Ż¼ū„×ķŲ╩╝╬╗Ż╗į┌t2ĢrķgČ╬Ż¼ŠĆ╚”0Ėąæ¬Ą─╩ŪG2ŠĆ░l╦═Ą─ą┼╠¢Ż¼G2=0╗“1Ż¼╚ĪøQė┌Įė╩šŠĆ╚”0Ą─╬╗ų├ĪŻ╚¶Įė╩šŠĆ╚”0Ą─ųąŠĆĘųäeį┌ó┘Īóó┌Īóó█Īóó▄Ą─╬╗ų├Ż¼ätĮė╩šŠĆ╚”0Ą─Įė╩šą┼╠¢Ą─ŽÓ╬╗╚ńłD3╦∙╩ŠĪŻ
łD3 Įė╩šą┼╠¢ŽÓ╬╗╩ŠęŌłD
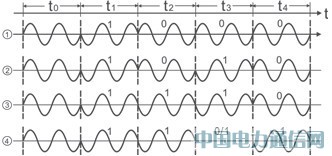
ė╔ė┌Ė„┬ĘGī”ŠĆ░┤ššĖ±└ū┤aęÄätĮ╗▓µŻ¼╦∙ęįŽÓ╬╗▒╚▌^Ą─ĮY╣¹öĄō■G2 G1 G0╩Ūę╗ĮMĖ±└ū┤aŻ¼įOĖ±└ū┤aG2 G1 G0ī”æ¬Ą─╩«▀MųŲöĄ×ķgŻ¼╝┤g×ķAPD╬╗ų├öĄō■ĪŻī”łD3ųąĄ─Č■▀MųŲĮ^ī”ŽÓęŲµI┐žŻ©2PSKŻ®š{ųŲą┼╠¢▀MąąĮŌš{Ż¼▓óęį=1ū„×ķŲ╩╝╬╗Ż¼ätėąŻ║į┌łD2Ą─╬╗ų├ó┘Ż¼ G2 G1 G0=000Ż¼g=0Ż╗į┌╬╗ų├ó┌Ż¼G2 G1 G0=010Ż¼g=3Ż╗į┌╬╗ų├ó█Ż¼G2 G1 G0=110Ż¼g=4Ż╗į┌╬╗ų├ó▄Ż¼ G2 G1 G0=111╗“101Ż¼g=5╗“6ĪŻ┐╔Ą├ĄĮAPD╬╗ų├╣½╩Į×ķŻ║

2.2 HRPDÖz£y
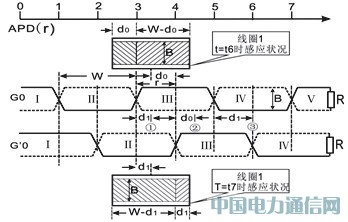
Ė▀Ęų▒µ┬╩╬╗ų├Öz£yŻ©HRPDŻ®įŁ└ĒŻ║╬╗ų├ą┼╠¢░l╔·Ų„Ęųäeī”é„▌öī”ŠĆG0Īó░l╦═▌d▓©Ż¼Öz£yĮė╩š╠ņŠĆŠĆ╚”1Ėąæ¬ą┼╠¢Ę∙Č╚Ż¼═©▀^▀\╦ŃĄ├ĄĮHR-PD╬╗ų├ĪŻęįŠĆ╚”1ųąą─ŠĆ×ķęŲäėÖC▄ćĄ─╬╗ų├Ż¼é„▌öī”ŠĆā╔Į╗▓µķgĄ─ģ^ė“ĘQ×ķKģ^ė“K=I,II,III…Ż®Ż╗ŠĆ╚”1ųąą─ŠĆŲ½ļxG0Īóé„▌öī”ŠĆ╦∙į┌ģ^ė“ųąą─ŠĆŠÓļxĘųäe×ķd0Īód1Ż¼’@╚╗d0+d1=rĪŻHRPD╬╗ų├Öz£y╚ńłD4╦∙╩ŠĪŻ
łD4 HRPDÖz£yŲĮõüłD
į┌t6ĢrķgČ╬Ż¼╬╗ų├ą┼╠¢░l╔·Ų„ī”G0é„▌öī”ŠĆ░l╦═▌d▓©ĢrŻ¼G0Ą─IIIģ^ė“ī”ŠĆ╚”1Ą─Ėąæ¬├µĘe×ķŻ║S=Ż©W-d0Ż®xBŻ¼G0Ą─IIģ^ė“ī”ŠĆ╚”1Ą─Ėąæ¬├µĘe×ķS=d0×BŻ¼ė╔ė┌IIĪóIIIģ^ė“ī”ŠĆ╚”1«a╔·Ą─Ėąæ¬ą┼╠¢ŽÓ╬╗ŽÓĘ┤Ż¼╦∙ęįŠĆ╚”1ėąą¦Ėąæ¬├µĘeS=Ż©W-d0Ż®×B-d0×B=2Ż©r-d0Ż®×BĪŻįOŠĆ╚”1ūŅ┤¾Ėąæ¬├µĘeSmax=W×B=2r×BŻ¼ī”æ¬Ėąæ¬ą┼╠¢ūŅ┤¾Ę∙Č╚×ķAmaxŻ©y,zŻ®Ż¼ätėąŻ║
į┌t7ĢrķgČ╬Ż¼╬╗ų├ą┼╠¢░l╔·Ų„ī”é„▌öī”ŠĆ░l╦═▌d▓©ĢrŻ¼ī”ŠĆ╚”1Ėąæ¬ą┼╠¢ū„ŽÓ═¼Ą─Ęų╬÷Ż¼Ą├Ż║

┴Ņ
ŪęėąŻ║
Ż©1Ż®ŠĆ╚”1Ą─ųąą─╬╗ė┌G0ā╔Į╗▓µķgū¾░ļ▓┐Ż©łD4╬╗ų├ó┘Ż®Ż¼┤╦╠ÄÖz£y│÷üĒĄ─APD╬╗ų├öĄō■g×ķŲµöĄŻ¼ätHRPD=d1=P0×rĪŻ
Ż©2Ż®░l╦═ŠĆ╚”Ą─ųąą─╬╗ė┌ā╔Į╗▓µķgū¾░ļ▓┐Ż©łD4╬╗ų├ó┌Ż®Ż¼┤╦╠ÄÖz£y│÷üĒĄ─APD╬╗ų├öĄō■g×ķ┼╝öĄŻ¼ätHRPD=d0=P1×rĪŻ
ŠC╔ŽŻ©1Ż®Ż©2Ż®Ż¼┐╔Ą├Ė▀Ęų▒µ┬╩╬╗ų├HRPD║═ŠC║Ž╬╗ų├ADDĘųäe×ķŻ║
2.3 Ėąæ¬¤oŠĆ╬╗ų├Öz£yīŹ└²Ęų╬÷
╝┘Č©r=10cmĪŻī”╠ņŠĆŽõŠĆ╚”1Ęųäe╠Äė┌łD4ųąĄ─╬╗ų├ó┘Īóó┌Īóó█Ż¼×ķĘų╬÷ĘĮ▒Ńų╗īæ╚²ī”Gé„▌öŠĆŻ¼ätėąŻ║
Ż©1Ż®ŠĆ╚”1╠Äė┌╬╗ų├ó┘
╚¶G2 G1 G0=010Ż¼╝┤g=3Ż¼ätAPD=2×r=30cmĪŻ
╚¶£yĄ├é„▌öī”ŠĆG0ĪóĄ─Ę∙Č╚×ķŻ║AŻ©G0Ż®=0.38AmaxŻ¼AŻ© Ż®=0.62AmaxŻ¼
Ż®=0.62AmaxŻ¼
ätė╔╩ĮŻ©7Ż®Ī½Ż©10Ż®Ą├Ż║P0=0.38Ż¼P1=0.62Ż¼HRPD=P0×r=3.8cmŻ╗ADD=APD+HRPD=33.8cmĪŻ
Ż©2Ż®ŠĆ╚”1╠Äė┌╬╗ų├ó┌
╚¶G2 G1 G0=011Ż¼╝┤g=4Ż¼ätAPD=g×r=40cmĪŻ
╚¶£yĄ├é„▌öī”ŠĆG0ĪóĄ─Ę∙Č╚×ķŻ║AŻ©G0Ż®=AŻ© Ż®=0.5AmaxŻ¼
Ż®=0.5AmaxŻ¼
═¼└Ē┐╔Ą├Ż║P0=P1=0.5Ż¼HRPD=P1×r=0.5×10cm=5cmŻ╗ADD=APD+HRPD=45cmĪŻ
Ż©3Ż®ŠĆ╚”1╠Äė┌╬╗ų├ó█
AŻ©G0Ż®=AmaxŻ¼AŻ© Ż®=0Ż¼┐╔Ą├P0=1Ż¼P1=0ĪŻė╔ė┌AŻ©G0Ż®=0Ż¼G1Ėąæ¬ą┼╠¢┼c╗∙£╩ą┼╠¢▒╚▌^Ż¼ŽÓ╬╗ŽÓ═¼Ż©╝┤×ķ0Ż®╗“ŽÓĘ┤Ż©╝┤×ķ1Ż®ĪŻ╦∙ęįŻ¼G2 G1 G0=111╗“G2 G1G0=101Ż¼╝┤g=5╗“6ĪŻätėąŻ║
Ż®=0Ż¼┐╔Ą├P0=1Ż¼P1=0ĪŻė╔ė┌AŻ©G0Ż®=0Ż¼G1Ėąæ¬ą┼╠¢┼c╗∙£╩ą┼╠¢▒╚▌^Ż¼ŽÓ╬╗ŽÓ═¼Ż©╝┤×ķ0Ż®╗“ŽÓĘ┤Ż©╝┤×ķ1Ż®ĪŻ╦∙ęįŻ¼G2 G1 G0=111╗“G2 G1G0=101Ż¼╝┤g=5╗“6ĪŻätėąŻ║
1Ż®╚Īg=5Ż¼ätAPD=g×r=5×10cm=50cmŻ¼HRPD=P0×r=1×10cm=10cmŻ¼ADD=APD+HRPD=50cm+10cm=60cmĪŻ
2Ż®╚Īg=6Ż¼ätAPD=g×r=6×10cm=60cmŻ¼HRPD=P1×r=0×10cm=0cmŻ¼ADD=APD+HRPD=60cm+0cm=60cmĪŻ
ŠC╔Ž1Ż®Īó2Ż®Ż¼Š∙Ą├Ż║ADD=60cmĪŻ
3 Ėąæ¬¤oŠĆ╬╗ų├Öz£yļŖ┬Ę
Ėąæ¬¤oŠĆ╬╗ų├Öz£yŽĄĮyļŖ┬Ę┐“łD╚ńłD5╦∙╩ŠĪŻ«öųą┐ž╩꥞├µŠųķ_╩╝░l╦═▌d▓©ą┼╠¢ĢrŻ¼DCD=1Ż╗CPUÖz£yĄĮDCD║¾Ż¼ī”2PSKĮŌš{▌ö│÷Öz£yŻ¼īóĄ┌1éĆ1ū„×ķŲ╩╝╬╗▀Mąą┤«ąąöĄō■Įė╩šŻ¼Ą├ĄĮAPD╬╗ų├öĄō■gŻ╗į┌Öz£yG0Ą─ĢrķgČ╬Ż¼åóäėA/D1║═A/D2Ż¼Å─A/D1║═A/D2ūx│÷Įė╩šŠĆ╚”0Įė╩šĄ─ą┼╠¢Ę∙Č╚AŻ©AN0Ż®║═Įė╩šŠĆ╚”1Įė╩šĄ─ą┼╠¢Ę∙Č╚AŻ©AN1Ż®Ż¼īóĖ„öĄō■┤·╚ļ╣½╩ĮŻ©5Ż®Ī½Ż©8Ż®Ż¼┐╔Ą├ęŲäėÖC▄ć╬╗ų├ADDĪŻ

łD5 Ėąæ¬¤oŠĆ╬╗ų├Öz£yļŖ┬Ę┐“łD
4 Ėąæ¬¤oŠĆ╬╗ų├Öz£yīŹ“×
īŹ“×ĘĮĘ©Ż║į┌ŠÄ┤aļŖ└|╚╬šęę╗╠ÄĘ┤Å═ęŲäė╠ņŠĆŽõŻ¼ų▒ų┴Öz£yĄĮAŻ©Ż®×ķūŅąĪŻ¼┤╦Ģr’@╩ŠĄžųĘ×ķ29.000mŻ¼ęį┤╦╠Äū„×ķīŹļHĄ─29.000mĪŻ╚╗║¾īó╠ņŠĆŽõį┌┤╦ĖĮĮ³├┐Ė¶2mmęŲäėę╗┤╬Ż¼ėøõø├┐┤╬╦∙Öz£yĄ─AŻ©G0Ż®║═AŻ©Ż®Ż¼▓óĖ∙ō■Öz£yĄ─öĄō■ėŗ╦Ń│÷╬╗ų├öĄō■Ż║HRPDĪóADDĪŻ═¼└ĒŻ¼į┌30.000m╠Äū„═¼śė£yįćĪŻ▓┐ĘųÖz£yöĄō■║═ėŗ╦ŃĮY╣¹╚ń▒Ē1╦∙╩ŠĪŻ
▒Ē1 ╬╗ų├Öz£y▓┐ĘųīŹ£yöĄō■║═ėŗ╦ŃĮY╣¹
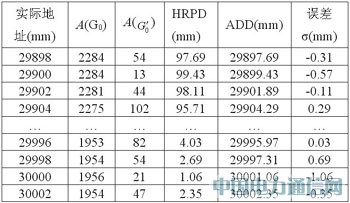
īŹ“×ĮY╣¹šf├„Ż║a.īŹ£y╬╗ų├┼c└Ēšō╔Žī”æ¬╬╗ų├Ų½▓Ņ▌^ąĪŻ╗b.╬╗ų├Öz£yŠ½Č╚Ė▀Ż¼Ęų▒µ┬╩×ķ2mmĪŻ×ķ┴╦£pąĪš`▓ŅŻ¼īŹļHæ¬ė├ųąīóČÓ┤╬īŹ“ץ─öĄō■ųŲ│╔▒ĒĖ±Ż¼ėŗ╦Ń│÷HRPDŻ¼▓ó▀Mąąą▐š²ĪŻ
5 ĮYšō
▒Š╬─įOėŗĄ─Ėąæ¬¤oŠĆ╬╗ų├Öz£yŽĄĮyŻ¼╩Ū└¹ė├ŠÄ┤aļŖ└|ųąé„▌öī”ŠĆ║═╠ņŠĆŽõŠĆ╚”Ą─ļŖ┤┼Ėąæ¬üĒīŹ¼FęŲäėÖC▄ć╬╗ų├Öz£yĄ─Ż¼▓╔ė├Ą─╩ŪĘŪĮėė|╩ĮĄ─Į^ī”╬╗ų├Öz£yĘĮ╩ĮŻ¼┐╦Ę■┴╦é„ĮyėąŠĆ║═¤oŠĆ╬╗ų├Öz£yĄ─╚▒Ž▌Ż¼┐╔ØMūŃęŲäėÖC▄ćŠ½┤_Č©╬╗Ą─ę¬Ū¾ĪŻ─┐Ū░Ż¼Ėąæ¬¤oŠĆ╬╗ų├Öz£y╝╝ągęč▒╗æ¬ė├ĄĮĮ╣Āt╣żśIęŲäėÖC▄ć╬╗ų├Öz£yųąŻ¼ė├ė┌ī”═ŲĮ╣▄ćĪóŽ©Į╣▄ćĪóčb├║▄ć║═│²ēm▄ćĄ─ūįäė┐žųŲŻ¼īŹļHæ¬ė├ą¦╣¹┴╝║├Ż¼╗∙▒ŠīŹ¼F┴╦ūįäė╗»ĪŻ





