š¬ę¬Ż║ßśī”Ėąæ¬ŠĆ╚”╩Į▄ć▌vÖz£yŲ„Ą─▓╗ūŃŻ¼įOėŗ┴╦ę╗ĘN╗∙ė┌Ė„Ž“«Éąį┤┼ūĶé„ĖąŲ„(AMR)Ą─ĘŪĮėė|╩ĮųŪ─▄▄ć▌v▒O£yčbų├Ż¼─▄▒O£y▄ć▌vĄ─ĄĮ▀_ĢrķgĪóŅÉą═ĪóĘĮŽ“║═▄ć╦┘Ą╚╗∙▒Šą┼ŽóĪŻŽĄĮyų„ę¬ė╔▓╔╝»ŽĄĮy║═’@╩ŠŽĄĮyā╔éƬÜ┴óĄ─▓┐ĘųĮM│╔ĪŻĮo│÷┴╦ŽĄĮyĄ─ė▓╝■įOėŗęį╝░│╠ą“┴„│╠łDŻ¼▓ó└¹ė├īŹ“×öĄō■└LųŲŪ·ŠĆłDŻ¼▒Ē├„┴╦įOėŗįŁ└Ē║═ėŗ╦ŃĘĮĘ©š²┤_ąįĪŻ
Ų¹▄ć┤¾Č╝ī┘ė┌ĶF┤┼śŗįņŻ¼į┌Ąž┤┼ł÷ųą┐╔ęį┐┤ū÷ļpśOąį┤┼ĶFŻ¼Ų¹▄ć┤┼ł÷Ģ■ī”Ąž┤┼ł÷«a╔·ö_äėŻ¼ę²ŲĄž┤┼ł÷┤┼┴”ŠĆĄ─╗¹ūāĪŻŲ¹▄ćį┌ņoų╣╝░ąą±éĢr▀\äė╦┘Č╚║═ĘĮŽ“▓╗═¼Ż¼ī”Ąž┤┼ł÷Ą─ö_äėę▓▓╗═¼Ż¼ō■┤╦┐╔═©▀^Öz£y┤┼ł÷ö_äėĄ─╠žąįŻ¼┼ąöÓ▄ć▌vą┼Žó╝░ąą±éĀŅæB[1-2]ĪŻé„ĮyĄ─▒O£yĘĮĘ©╩Ū═©▀^Ėąæ¬ŠĆ╚”╩Į▄ć▌vÖz£yŲ„▀Mąą╠Į£yŻ¼Öz£yŠ½Č╚Ė▀Ż¼ąį─▄ĘĆČ©Ż¼Ą½╩Ū╠Į£yŠĆ╚”¾wĘe┤¾Ż¼░▓čbŠSūo▒╚▌^Å═ļsŻ¼╣ż│╠┴┐┤¾Ż¼Ūęęūė┌ōpē─ĪŻĖ▀ņ`├¶Č╚ĪóĖ▀Š½Č╚┤┼ūĶé„ĖąŲ„Ą─│÷¼F×ķ▄ć▌v▒O£y╠ß╣®┴╦ą┬Ą─╩ųČ╬Ż¼┤┼ūĶé„ĖąŲ„┐╔Öz£yäėæBĪóņoæBĄ─▄ć▌vŻ¼ī”▄ć╦┘╣└ėŗĪó▄ćą═ĘųŅÉĄ╚Č╝Š▀ėą▌^║├Ą─ą¦╣¹ĪŻ▒Š╬─ĮķĮB┴╦ę╗ĘN╗∙ė┌┤┼ūĶé„ĖąŲ„HMC1043Ą─ųŪ─▄▄ć▌v▒O£yŽĄĮyĪŻ
1 ŽĄĮyįOėŗ
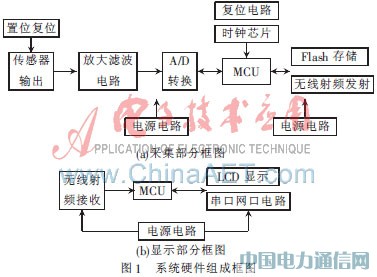
ŽĄĮyų„ę¬ė╔öĄō■▓╔╝»čbų├║═’@╩Ščbų├ā╔éƬÜ┴ó▓┐ĘųĮM│╔Ż¼ā╔éĆöĄō■▓╔╝»čbų├ī”æ¬ę╗éĆ’@╩Ščbų├ĪŻöĄō■▓╔╝»čbų├ė╔é„ĖąŲ„ļŖ┬Ę▓╔╝»┤┼ł÷ą┼╠¢ĪóĄõą═Ą─ą┼╠¢╠Ä└ĒļŖ┬Ęīó┤┼ł÷ą┼╠¢▐DōQ│╔öĄūųą┼╠¢Ż¼MCU▓╔╝»Īóē║┐söĄō■Ż¼īóöĄō■═©▀^╔õŅl░l╔õ─ŻēK░l╔õĪŻ╔õŅlĮė╩š─ŻēKĮė╩šā╔éĆ▓╔╝»čbų├░l╦═Ą─öĄō■Ż¼╦═╚ļMCU▀Mąąėŗ╦ŃĪóūRäeŲź┼õŻ¼▓ó┐žųŲLCD’@╩ŠĪŻ═©▀^┤«┐┌║═ŠW┐┌Īó▀Ć┐╔ęįīóĮė┐┌öĄō■▀Mę╗▓Į░l╦═Įoėŗ╦ŃÖC┤µā”Īó╠Ä└ĒĪŻ
1.1 ė▓╝■┐é¾wįOėŗ
öĄō■▓╔╝»čbų├║═’@╩Ščbų├Ą─ė▓╝■ĮM│╔┐“łD╚ńłD1╦∙╩ŠĪŻ
1.2 HMC1043┤┼ūĶé„ĖąŲ„įŁ└Ē╝░╩╣ė├
Ė„Ž“«Éąį┤┼ūĶé„ĖąŲ„AMR╩Ūį┌ÅŖ┤┼ł÷Ž┬īóĶFµć║ŽĮ▒Ī─ż│┴Ęeį┌╣ĶęrĄū╔ŽųŲ│╔Ż¼│┴ĘeĄ─Ģr║“▒Ī─żęįķLŚlĦĄ─ą╬╩ĮĘų▓╝ĪŻį┌ėąļŖ┴„═©▀^▒Ī─żÄ¦ĢrŻ¼╩®╝ėę╗éĆ▒╗£y┤┼ł÷BŻ¼ät┤┼╗»ÅŖČ╚ĘĮŽ“┼cļŖ┴„ĘĮŽ“Ą─ŖAĮŪθ░l╔·ūā╗»Ż¼ę²ŲļŖūĶūĶųĄūā╗»(ΔR/R)ĪŻ╦─éĆ▀@śėĄ─┤┼ūĶĮė│╔ę╗éĆ╗▌╦╣═©ļŖś“Ż¼╬╗ė┌┤┼ł÷BŽÓī”╬╗ų├Ą─ā╔éĆ┤┼ūĶūĶųĄį÷╝ėŻ¼┴Ē═Ōā╔éĆ┤┼ūĶĄ─ūĶųĄ£pąĪŻ¼į┌ŲõŠĆąįĘČć·ā╚Ż¼ļŖś“Ą─▌ö│÷ļŖē║┼c▒╗£y┤┼ł÷│╔š²▒╚ĪŻłD2×ķ┤┼ūĶé„ĖąŲ„įŁ└ĒłD[3-4]ĪŻHMC1043╩Ū╗¶─ßĒfĀ¢╣½╦ŠĄ─╚²▌SAMRé„ĖąŲ„Ż¼ė╔╚²éĆŽÓ╗ź┤╣ų▒Ą─▀@ĘN╗▌╦╣═©ļŖś“ĮM│╔Ż¼─▄£y┴┐┐šķg╚²ŠSĘĮŽ“Ą─┤┼ł÷Ż¼£y┴┐ĘČć·±6GŻ¼Ęų▒µ┬╩120μGĪŻ
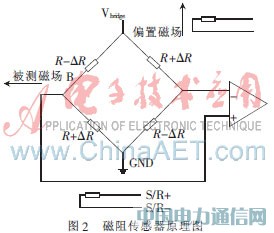
į┌ėąÅŖ┤┼ł÷Ė╔ö_ĢrŻ¼┤┼ūĶé„ĖąŲ„Ą─Š½Č╚║═ņ`├¶Č╚Ž┬ĮĄŻ¼└¹ė├ÅŖ├}ø_ļŖ┴„«a╔·ÅŖ┤┼ł÷╩╣┤┼ūĶĄ─┤┼«Āųžą┬čžų°├¶Ėą▌SĘĮŽ“ėąą“┼┼┴ąŻ¼╗ųÅ═AMRé„ĖąŲ„Ą─ūŅ╝č╠žąį[4]ĪŻHMC1043Ą─SR+║═SR-ų├╬╗/Å═╬╗ę²─_ų«ķgėąę╗éĆ2.5ΩĄ─ĶF┤┼ąįļŖūĶŻ¼┐╔ė├7555Č©ĢrŲ„«a╔·ų▄Ų┌ĢrńŖą┼╠¢Ż¼┐žųŲIRF7105«a╔·ų├╬╗/Å═╬╗├}ø_ļŖ┴„Ż¼╚ńłD3╦∙╩ŠĪŻ

1.3 ą┼╠¢╠Ä└ĒļŖ┬ĘįOėŗ
┤┼ūĶé„ĖąŲ„▌ö│÷Ą──ŻöMą┼╠¢ūŅąĪų╗ėą▓╗ĄĮ0.5μVŻ¼ąĶę¬Ę┼┤¾ļŖ┬Ę▀MąąĘ┼┤¾Īó×V▓©Ż¼╚╗║¾▌ö╚ļA/D▐DōQļŖ┬ĘŻ¼į┘īóĄ├ĄĮĄ─öĄūųą┼╠¢╦═╚ļ┐žųŲąŠŲ¼MCUŻ¼═©▀^╔õŅl░l╔õ─ŻēK░l╔õĄĮĮė╩šČ╦ĪŻ╔õŅlĮė╩šČ╦Įė╩šĄĮöĄō■║¾ė╔MCU░┤ššųĖČ©Ą─╦ŃĘ©ėŗ╦ŃĪóĘų╬÷öĄō■Ż¼ėŗ╦Ń▄ć╦┘Ż¼Ųź┼õ▄ćą═Ż¼▒µäeĘĮŽ“Ż¼▓ó░č═©▀^Ģr┐╠Īó▄ćą═ĪóĘĮŽ“Īó▄ć╦┘ę╗Ų╦═╚ļLCD’@╩Š─ŻēK’@╩ŠŻ¼ę▓┐╔═©▀^ŽÓĻPĄ─Įė┐┌īóöĄō■╦═╚ļėŗ╦ŃÖC┤µā”ĪŻĮø▀^ėŗ╦Ńé„ĖąŲ„▌ö│÷Ą──ŻöMą┼╠¢Ę┼┤¾140▒ČŻ¼▀m║Ž+2.5Vģó┐╝ļŖē║Ą─16╬╗Š½Č╚A/D▐DōQąŠŲ¼ĪŻ▀\╦ŃĘ┼┤¾Ų„OPA4376Ż¼ūŅ┤¾25μVŲ½ęŲļŖē║Īó5.5MHzŅlīÆĪó7.5nV/ įļ┬Ģ├▄Č╚Ż¼ę²╚ļįļ┬Ģ║▄ąĪŻ╗ąĪė┌950μAņoæBļŖ┴„Ż¼+5Vå╬ļŖį┤╣®ļŖŻ¼ėą└¹ė┌ŽĄĮyĮĄĄ═╣”║─ĪŻį┌Ę┼┤¾Ų„Ą─Ę┤ü╗ž┬ĘĮė╚ļļŖūĶR(12.4kΩ)║═ļŖ╚▌C(150pF)ĮM│╔Įžų╣Ņl┬╩50kHzĄ─Ą══©×V▓©Ų„Ż¼ī”Ę┤ü▌ö╚ļą┼╠¢Ą══©×V▓©Ż¼┐sąĪą┼╠¢Ä¦īÆŻ¼×V│²Ė▀Ņlįļ┬ĢĪŻ
įļ┬Ģ├▄Č╚Ż¼ę²╚ļįļ┬Ģ║▄ąĪŻ╗ąĪė┌950μAņoæBļŖ┴„Ż¼+5Vå╬ļŖį┤╣®ļŖŻ¼ėą└¹ė┌ŽĄĮyĮĄĄ═╣”║─ĪŻį┌Ę┼┤¾Ų„Ą─Ę┤ü╗ž┬ĘĮė╚ļļŖūĶR(12.4kΩ)║═ļŖ╚▌C(150pF)ĮM│╔Įžų╣Ņl┬╩50kHzĄ─Ą══©×V▓©Ų„Ż¼ī”Ę┤ü▌ö╚ļą┼╠¢Ą══©×V▓©Ż¼┐sąĪą┼╠¢Ä¦īÆŻ¼×V│²Ė▀Ņlįļ┬ĢĪŻ
ADS8343╩Ūę╗éĆĄ═╣”║─Īó16╬╗Š½Č╚Ą──ŻöĄ▐DōQąŠŲ¼Ż¼▐DōQ╦┘┬╩100kHzŻ¼+5Vų▒┴„ļŖį┤╣®ļŖŻ¼ģó┐╝ļŖē║įOų├+2.5VĪŻ╩╣ė├Ųõųą╚²éĆ═©Ą└░č▓╔╝»Ą─╚²┬Ę─ŻöMą┼╠¢▐DōQ×ķöĄūųą┼╠¢Ż¼┐šķeĢr▀M╚ļĻPöÓ─Ż╩ĮŻ¼ĮĄĄ═╣”║─Ż¼▀mė├ė┌ļŖ│ž╣®ļŖĄ─Ą═╣”║─ŽĄĮyĪŻ
1.4 MCU┐žųŲļŖ┬Ę
P89LPC932A1╩Ūį÷ÅŖą═51╠Ä└ĒŲ„Ż¼ųĖ┴Ņł╠ąąĢrķg2~4éĆĢrńŖų▄Ų┌Ż¼▀xė├7.328MHz═Ō▓┐¤oį┤Š¦š±ū„×ķĢrńŖŻ¼▀mė├ļŖē║ĘČć·īÆŻ¼─▄╣żū„į┌Ą═╣”║─ĀŅæBŻ¼ėų─▄½@Ą├6▒Čė┌Ųš═©51╠Ä└ĒŲ„Ą─╠Ä└Ē╦┘Č╚ĪŻ+3.3Vų▒┴„ļŖį┤╣®ļŖŻ¼╩╣ė├ICPį┌ļŖ┬ĘŠÄ│╠Ż¼▀BĮėVDDĪóVSSĪóP0.5ĪóP0.4ĪóRSTŻ¼5éĆę²─_īŹ¼FŠÄ│╠ĪŻŽĄĮyķeų├Ģrūįäė▀M╚ļĄ¶ļŖ─Ż╩ĮŻ¼ĮĄĄ═╣”║─ĪŻMCU┼õėą┤µā”─ŻēKĪóÅ═╬╗ļŖ┬Ę║═ĢrńŖļŖ┬ĘĪŻ
FM24CL04╩ŪRamtron╣½╦ŠĄ─ę╗┐Ņ4KB(512B×8)Ą─ĘŪęū╩¦ąį┤µā”Ų„Ż¼╩╣ė├ā╔ŠĆI2C═©ą┼ģfūhŻ¼ś╦£╩8─_ĘŌčbĪŻĄžųĘę²─_A1ĪóA2ĮėĄžŻ¼ŲõįLå¢ĄžųĘ╩Ū0xA0╗“š▀0xA1Ż¼Ųõųą0xA0īżųĘŪ░256B(ę╗Ēō)Ż¼0xA1īżųĘ║¾256BĪŻP89LPC932A1Ą─SCLĪóSDA╩Ūķ_┬®▌ö│÷Ż¼▀@ā╔ŚlŠĆ╔ŽĖ„Įėę╗éĆ10kΩ╔Ž└ŁļŖūĶŻ¼┼cFM24CL04Ą─SCLĪóSDAę²─_▀BĮėĪŻWP┼cCPUĄ─I/Oę²─_ŽÓ▀BŻ¼═©▀^I/O┐žųŲąŠŲ¼Ą─īæ▒ŻūoĪŻ
1.5 ╔õŅl░l╔õ║═Įė╩š─ŻēK
PTR8000+╩Ū╗∙ė┌RF905╔õŅl═©ą┼ąŠŲ¼Ą─ŪČ╚ļ╩Į¤oŠĆ═©ą┼─ŻēKŻ¼Įė╩šĪó░l╦═Š∙┐╔ĪŻ+3.3Vų▒┴„ļŖį┤╣®ļŖŻ¼Ą¶ļŖ╣żū„─Ż╩ĮŽ┬ņoæBļŖ┴„2.5μAŻ¼═©▀^SPIĮė┐┌▀BĮėĄĮCPUĪŻŽĄĮy╩╣ė├┴╦╦─ĘN╣żū„─Ż╩ĮŻ║┼õų├─Ż╩ĮĪóSPIŠÄ│╠─Ż╩ĮĪó░l╔õ/Įė╩š─Ż╩Į║═Ą¶ļŖ─Ż╩ĮĪŻį┌┼õų├─Ż╩ĮŽ┬Ż¼CPU═©▀^SPIĮė┐┌┼õų├PTR8000+╣żū„ģóöĄŻ¼╚╗║¾▀M╚ļ░l╔õ/Įė╩š─Ż╩Į═©▀^SPIĮė┐┌┼cå╬Ų¼ÖCöĄō■═©ą┼Ż¼ėąCRCąŻ“×ĪŻķeų├Ģr▀M╚ļĄ¶ļŖ─Ż╩ĮŻ¼ĮĄĄ═ŽĄĮy╣”║─ĪŻ
2 ŽĄĮy│╠ą“┴„│╠łD
ŽĄĮy▄ø╝■╣”─▄īŹ¼Fė╔CšZčįŠÄīæš{įćŻ¼ų„ę¬īŹ¼FöĄō■Ą─▓╔╝»ĪóĘų╬÷ėŗ╦Ńęį╝░öĄō■Ą─▐D░l’@╩ŠĄ╚╣”─▄Ż¼ų„│╠ą“┴„│╠łD╚ńłD4╦∙╩ŠĪŻ

3 įć“×öĄō■║═▄ø╝■ėŗ╦Ń
é„ĖąŲ„▓╔╝»ĄĮXĪóYĪóZ ╚²ŠS▌SĘĮŽ“╔ŽĄ─┤┼ł÷ÅŖČ╚Ż¼┐šķg┤┼ł÷ÅŖČ╚┐╔═©▀^╩Ė┴┐║Ž│╔╣½╩ĮŪ¾Ą├Ż║
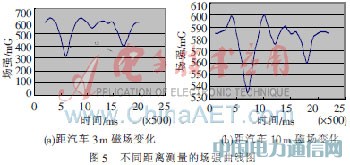
łD5╩ŪĖ∙ō■ę╗▌v╔Ż╦■╝{▐I▄ćš²Ž“═©▀^ĢrĘųäeį┌3mĪó10m▀h╠Ä£yĄ├┤┼ł÷öĄųĄ└LųŲĄ─Ū·ŠĆłDĪŻļSų°ŠÓļxį÷╝ėŻ¼┤┼ł÷ūā╗»čĖ╦┘£p╚§Ż¼╦∙ęį┤╦▒O£yčbų├▀m║Ž░▓čbį┌ŠÓ▄ć▌v10męįā╚Ą─ĄžĘĮĪŻ
3.1 ▄ć╦┘ėŗ╦Ń
Å─łD5ųą┐╔ęį┐┤ĄĮŻ¼▄ć▌v═©▀^é„ĖąŲ„Ģr┤┼ł÷ūā╗»Ę∙Č╚▓ó▓╗┐é╩ŪŽÓ═¼Ą─Ż¼Ąž┤┼ł÷╗¹ūāūŅ┤¾╠Ä░l╔·į┌░läėÖC═©▀^é„ĖąŲ„Ą─Ģr┐╠[5]ĪŻį┌ŽÓŠÓ30mĄ─═¼é╚┬Ę▀ģ░▓čbā╔éĆé„Ėąčbų├Ż¼CPUĘųäeėøõø╗¹ūāūŅ┤¾ųĄĄ─Ģr┐╠Ż¼▓ó░l╦═ĮoĮė╩ščbų├ĪŻā╔éĆĢr┐╠Ģrķg▓ŅųĄŠ═╩Ū░läėÖC═©▀^30mŠÓļx╦∙ė├Ą─ĢrķgŻ¼Ė∙ō■ν=Δs/ΔtŻ¼’@╩Ščbų├CPUėŗ╦Ń│÷▄ć▌vąą±é╦┘Č╚νĪŻĢrńŖąŠŲ¼▀xė├ĢrķgŠ½Č╚░┘Ęųų«ę╗├ļĄ─PCF8353Ż¼═©▀^CPUĄ─I/OĮė┐┌┐žųŲĪŻ
3.2 ĘĮŽ“┼ąöÓ
▄ć▌vĘųäeÅ─š²Ž“║═─µŽ“═©▀^ĢrŻ¼┤┼ł÷ö_äėĘ∙ųĄŽÓ═¼Ż¼Ą½╩Ūš²Ž“═©▀^Ģr┤┼ł÷Ž╚£p╚§╚╗║¾į÷ÅŖŻ¼─µŽ“═©▀^ĢrŽÓĘ┤Ż¼┤┼ł÷Ž╚į÷ÅŖ╚╗║¾£p╚§ĪŻ▄ć▌v±é▀^ĢrĄž┤┼┴”ŠĆŽ“▄ć▌vÅØŪ·Ż¼╚ń╣¹▄ć▌vėŁų°┤┼▌SĘĮŽ“±éüĒŻ©─µŽ“Ż®Ż¼Ąž┤┼┴”ŠĆŽ“┤┼▌SĘĮŽ“ÅØŪ·Ż¼┤┼ł÷į÷ÅŖŻ¼╚ńłD6╦∙╩ŠĪŻėŗ╦ŃĢr×VĄ¶┤┼ł÷▒Š╔ĒĄ─╬óąĪ▓©äė║═▀h╠Ä▄ć▌vĄ─Ė╔ö_Ż¼┼ąöÓĄž┤┼ł÷į÷ÅŖ▀Ć╩Ū£p╚§Ż¼Ą├│÷▄ć▌vąą±éĘĮŽ“ĪŻ

3.3 ▄ć▌vŅÉą═┼ąöÓ
▓╗═¼ŅÉą═Ą─▄ć▌v±é▀^Ż¼ī”Ąž┤┼ł÷Ą─ö_äėĖ„ėą╠ž³c[5]Ż¼└²╚ń├µ░³▄ć═©▀^ĢrŻ¼X▌S┤┼ł÷ūā╗»Ņl┬╩Ą═Ż╗▐I▄ć═©▀^ĢrŻ¼X▌S┤┼ł÷ūā╗»Ņl┬╩▌^Ė▀Ż¼Ą½╩Ū─▄┴┐╝»ųąį┌Ą┌ę╗éĆ▓©ĘÕ║═▓©╣╚Ż¼╚ńłD7╦∙╩ŠĪŻīó▓╗═¼ŅÉą═Ą─┤┼ł÷ö_äė─Ż╩Į┤µĘ┼ĄĮöĄō■┤µā”Ų„└’Ż¼ī”£yĄ├Ą─┤┼ł÷öĄō■ūRäeĪóŲź┼õŻ¼┼ąöÓ═©▀^▄ć▌vĄ─▄ćą═ĪŻ

┤╦▒O£yčbų├ņ`├¶Č╚Ė▀Ż¼ĘĆČ©ąį║═┐╔┐┐ąį┴╝║├Ż¼£žČ╚ĘČć·īÆŻ¼─▄£╩┤_ėŗ╦Ń▄ć▌v╦┘Č╚ĪóĘĮŽ“▓ó’@╩ŠĄĮ▀_ĢrķgĪó▄ćą═Ą╚ą┼ŽóĪŻįOėŗ▓╔ė├Ą═╣”║─į¬╝■Ż¼¤o╣żū„Ģrūįäė▀M╚ļĄ¶ļŖ─Ż╩Į▀Mę╗▓ĮĮĄĄ═╣”║─Ż¼¾wĘeąĪŪ╔Ż¼ęū░▓čbŻ¼┐╔ęį═Ļ╚½╠µ┤·é„ĮyĄ─ļŖ┴„ŠĆ╚”Ą─╠Į£y─Ż╩ĮĪŻ£y┴┐▀^│╠¤oĮėė|Ż¼═©▀^¤oŠĆ╔õŅl░l╔õ─ŻēK░l╔õöĄō■Ż¼īŹ¼F┴╦▌^▀hŠÓļxĄ─▒O┐žĪŻčbų├┐╔░▓čbį┌═Ż▄ćł÷ĪóĖ▀╦┘┬Ę┐┌ĪóĮųĄ└┼į▀ģŻ¼─▄īŹĢr▒O£y▄ć▌vą┼ŽóŻ¼ĘĮ▒ŃųŪ─▄ĪŻ
ģó┐╝╬─½I
[1] Moon Ho KangŻ¼Byoung Wook ChoiŻ¼Kyung Chul KohŻ¼et al. Experimental study of a vehicle detector with an AMR sensor[J]. Sensors and Actuators AŻ¼2005Ż¼118(2)Ż║278-284.
[2] └ŅŽŻä┘Ż¼ė┌ÅV╚A.Ė„Ž“«Éąį┤┼ūĶé„ĖąŲ„į┌▄ć▌v╠Į£yųąĄ─æ¬ė├[J].▒▒Š®┐Ų╝╝┤¾īWīWł¾Ż¼2006Ż¼28(6)Ż║587-590.
[3] ┼ß▌WŻ¼ė▌─ŽĘĮŻ¼äóŲµŻ¼Ą╚.Ė„Ž“«Éąį┤┼ūĶé„ĖąŲ„Ą─įŁ└Ē╝░Ųõæ¬ė├[J].āx▒Ē╝╝ąg┼cé„ĖąŲ„Ż¼2004(8)Ż║26-27Ż¼32.
[4] å╠Į©ųęŻ¼└ŅŲGŻ¼╬─žS.ę╗ĘNĖ„Ž“«Éąį┤┼ūĶé„ĖąŲ„į┌▄ć▌v╠Į£yųąĄ─æ¬ė├[J].é„ĖąŲ„┼c╬óŽĄĮyŻ¼2009Ż¼28(5)Ż║106-108.
[5] Jose Pelegri SebastiaŻ¼Jorge Alberola LluchŻ¼J. Rafael Lajara Vizcaino. Signal conditioning for GMR magnetic sensors Applied to traffic speed monitoring GMR sensors[J]. Sensors and Actuators AŻ¼2007Ż¼137Ż║230-235.





