1 ę²čį
¼F┤·Ė▀ąį─▄ū„æ’wÖCŲš▒ķ▓╔ė├═Ų┴”╩Ė┴┐╝╝ągŻ¼Ė„ĘNĖ▀┐šĖ▀╦┘Ė▀ÖCäėį┘╚╦ÅŚŅ^Ą─═■├{ė·’@═╗│÷Ż¼▀@ī”é„ĮyÜŌäėȵ┐žųŲĄ─ī¦ÅŚŽĄĮy╠ß│÷ą┬Ą─ę¬Ū¾ĪŻ¼F┤·ī¦ÅŚę¬Ū¾─▄ē“▀xō±╣źō¶─┐ś╦Ż¼Š▀ėąę╗Č©Ą─┐╣Ė╔ö_─▄┴”Ż¼īŹ¼F╚½╠ņ║“ū„æŻ¼▀@╩╣Ą├ī¦ÅŚŽ“Ė▀Š½Č╚ĪóĖ▀ųŪ─▄Īó▌pąĪą═╗»░lš╣Ż╗═¼ĢrŻ¼ī¦ÅŚųŲī¦┐žųŲŠ½Č╚Ą─╠ßĖ▀ęčÅ─ųŲī¦▐DŽ“┐žųŲĪŻī¦ÅŚ─┐ś╦ĘČć·▓╗öÓöU┤¾Ż¼ė╔Ę┤’wÖCöU┤¾ų┴Ę┤č▓║Įī¦ÅŚĪóĘ┤ÅŚĄ└╩Įī¦ÅŚĄ╚Ę┤ī¦╚╬äšĪŻĖ▀┐šĪóĖ▀╦┘Īó┤¾ÖCäėęč│╔×ķ«öĮ±ī¦ÅŚ─┐ś╦Ą─ųžę¬╠žš„Ż¼─┐ś╦Ą─Ė▀╦┘┤¾ÖCäė╠žš„ī¦ų┬ÅŚę╗─┐ŽÓī”▀\äė╝ėäĪŻ¼ī”ī¦ÅŚ─®Č╦▀^▌d╠ß│÷║▄Ė▀ę¬Ū¾Ż╗┴Ēę╗ĘĮ├µŻ¼─┐ś╦Ą─Ė▀┐š╠žš„ī¦ų┬ī¦ÅŚŽĄĮyą¦┬╩┤¾┤¾ĮĄĄ═Ż¼┐╔ė├▀^▌dļSĖ▀Č╚Ą─╔²Ė▀Č°┤¾Ę∙Ž┬ĮĄĪŻ×ķ┴╦ĮŌøQ▀@ą®├¼Č▄Ż¼▀@└’▓╔ė├PID┐žųŲĘĮĘ©┐žųŲī¦ÅŚĄ─Ė®č÷ĪóŲ½║ĮĪóØLäė3éĆ═©Ą└ĪŻ
2 ─Żą═Ą─Į©┴ó
蹊┐ī¦ÅŚųŲī¦å¢Ņ}Ż¼▒žĒÜęįę╗Č©Ą─öĄīW─Żą═×ķ╗∙ĄAĪŻę“┤╦Ż¼į┌▀xō±▀m«öĄ─ū°ś╦ŽĄ║¾Ż¼Ęų╬÷═Ųī¦│÷ī¦ÅŚĄ─Ęų═©Ą└Ą─└ĒŽļ┐žųŲ▀\äėīW─Żą═Ż¼▓óĮ©┴óȵÖC─Żą═ĪŻ
2.1 Ęų═©Ą└Ą─└ĒŽļ┐žųŲäė┴”īWĘĮ│╠
ī¦ÅŚė╔ė┌┤µį┌ØLäėĮŪŻ¼Ģ■įņ│╔±Ņ║Ž¼FŽ¾Ż¼Å─Č°į÷╝ė┐žųŲ└¦ļyŻ¼ĮĄĄ═┐žųŲŠ½Č╚Ż¼╣╩æ¬▒M┴┐£p╔┘±Ņ║ŽŻ¼Ęų═©Ą└┐žųŲĪŻė╔ė┌ī¦ÅŚĄ─ī”ĘQąįŻ¼«öØLäėĮŪ×ķ┴Ń╗“▌^ąĪĢrŻ¼║÷┬įĖ®č÷┼cŲ½║ĮĄ─±Ņ║ŽŻ¼╝┤å╬▌ö╚ļå╬▌ö│÷ŽĄĮyĪŻę“┤╦┐╔ė├ĮøĄõ┐žųŲ└ĒšōĘų═©Ą└üĒ蹊┐ĪóĘų╬÷║═įOėŗī¦ÅŚĄ─┐žųŲŽĄĮyĪŻ
┐vŽ“▀\äė×ķī¦ÅŚ┐vŽ“äė┴”īWĘĮ│╠×ķŻ║

╩ĮųąŻ¼ ×ķŪąŽ“┴”Ż¼
×ķŪąŽ“┴”Ż¼ ×ķĘ©Ž“┴”Ż¼
×ķĘ©Ž“┴”Ż¼ ×ķĖ®č÷┴”ŠžŻ¼m×ķī¦ÅŚ┘|┴┐Ż¼V×ķī¦ÅŚĄ─’wąą╦┘Č╚╩Ė┴┐Ż¼α×ķ╣źĮŪŻ¼θ×ķÅŚĄ└Ą─āAĮŪŻ¼δz×ķĖ®č÷ȵŲ½ĮŪŻ¼ωz×ķī¦ÅŚ└@ÅŚ¾wū°ś╦ŽĄoz1▌SĄ─ĮŪ╦┘Č╚Ż¼XŻ¼Y×ķÅŚ╔ŽĄ─┐é┐šÜŌäė┴”čž╦┘Č╚ū°ś╦ŽĄĘųĮŌĄ─ūĶ┴”Īó╔²┴”Ż¼Jz×ķī¦ÅŚ└@ÅŚ¾wū°ś╦ŽĄoz1▌SĄ─▐DäėæT┴┐Ż¼Mz×ķĖ®č÷┴”ŠžĪŻ
×ķĖ®č÷┴”ŠžŻ¼m×ķī¦ÅŚ┘|┴┐Ż¼V×ķī¦ÅŚĄ─’wąą╦┘Č╚╩Ė┴┐Ż¼α×ķ╣źĮŪŻ¼θ×ķÅŚĄ└Ą─āAĮŪŻ¼δz×ķĖ®č÷ȵŲ½ĮŪŻ¼ωz×ķī¦ÅŚ└@ÅŚ¾wū°ś╦ŽĄoz1▌SĄ─ĮŪ╦┘Č╚Ż¼XŻ¼Y×ķÅŚ╔ŽĄ─┐é┐šÜŌäė┴”čž╦┘Č╚ū°ś╦ŽĄĘųĮŌĄ─ūĶ┴”Īó╔²┴”Ż¼Jz×ķī¦ÅŚ└@ÅŚ¾wū°ś╦ŽĄoz1▌SĄ─▐DäėæT┴┐Ż¼Mz×ķĖ®č÷┴”ŠžĪŻ
Č°é╚Ž“▀\äė×ķ║ĮŽ“║═ÖMŽ“ŽÓ╗źĮ╗┬ō±Ņ║ŽŻ¼ätī¦ÅŚé╚Ž“äė┴”īWĘĮ│╠×ķŻ║
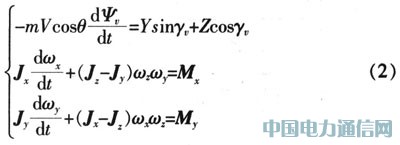
╩ĮųąŻ¼-mVcosθ(dψv/dt)×ķī¦ÅŚ┘|ą─╝ė╦┘Č╚Ą─╦«ŲĮĘų┴┐Ż¼“-”▒Ē╩ŠŽ“ą─┴”×ķš²Ż¼╦∙ī”æ¬Ą─ψv×ķžōŻ¼Ę┤ų«ęÓ╚╗ĪŻ╦³╩Ūė╔ĮŪČ╚š²žō╠¢Č©┴x╦∙øQČ©Ą─Ż¼dωx/dtĪódωy/dt×ķī¦ÅŚ▐DäėĮŪ╝ė╦┘Č╚╩Ė┴┐į┌ÅŚ¾wū°ś╦ŽĄ▌S╔ŽĄ─Ęų┴┐Ż¼JxĪóJyĪóJzĘųäe×ķī¦ÅŚ└@ÅŚ¾wū°ś╦ŽĄox1Īóoy1Īóoz1▌SĄ─▐DäėæT┴┐Ż¼MxĪóMyĘųäe×ķØL▐D┴”Šž║═Ų½║Į┴”ŠžŻ¼YĪóZĘųäe×ķÅŚ╔ŽĄ─┐é┐šÜŌäė┴”čž╦┘Č╚ū°ś╦ŽĄĘųĮŌĄ─╔²┴”Īóé╚Ž“┴”Ż¼ωxĪóωyĪóωzĘųäe×ķī¦ÅŚ└@ÅŚ¾wū°ś╦ŽĄox1Īóoy1Īóoz1▌SĄ─ĮŪ╦┘Č╚ĪŻ
2.2 ȵÖC─Żą═
2.2.1 ļŖäėÖC─Żą═Į©┴ó
ļŖäėÖC┐žųŲįŁ└ĒłD╚ńłD1╦∙╩ŠĪŻ
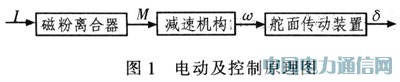
įO£p╦┘▒╚iŻ¼┐é▐DäėæT┴┐JŻ¼┴”ŠžMŻ¼▌ö╚ļļŖē║uŻ¼ļŖ┴„IŻ¼ļŖĖąLŻ¼ļŖūĶRŻ¼╣─▌åĄ─ĮŪ╦┘Č╚┼c▐DĮŪĘųäe×ķω║═δkŻ¼ČµŲ½ĮŪδŻ¼ļŖäėȵÖCĄ─┴”Šž╠žąįĮ³╦Ų×ķAŻ¼ÖCąĄ╠žąįĮ³╦Ų×ķ-BŻ¼Mj╩ŪŃqµ£┴”ŠžŻ¼ ╩Ūå╬╬╗ȵŲ½ĮŪ«a╔·Ą─Ńqµ£┴”ŠžŻ¼TM=L/R×ķļŖäėÖCĄ─ļŖÜŌĢrķg│ŻöĄŻ¼ätȵÖCį┌ėą▌dŪķørŽ┬Ą─é„▀f║»öĄ×ķŻ║
╩Ūå╬╬╗ȵŲ½ĮŪ«a╔·Ą─Ńqµ£┴”ŠžŻ¼TM=L/R×ķļŖäėÖCĄ─ļŖÜŌĢrķg│ŻöĄŻ¼ätȵÖCį┌ėą▌dŪķørŽ┬Ą─é„▀f║»öĄ×ķŻ║

2.2.2 ȵ╗ž┬Ę
ȵ├µĄ─Ńqµ£┴”Šžī”ȵÖCĄ─ė░Ēæ║▄┤¾Ż¼’wąą┐žųŲŽĄĮy▓╔ė├ķ]Łh╗ž┬ĘįOėŗŻ¼Ž¹│²Ųõė░ĒæĪŻČµ╗ž┬Ęę╗░Ń▓╔ė├╬╗ų├║═╦┘Č╚ā╔ĘNĘ┤üčaāöĘĮ╩ĮŽ¹│²Ńqµ£┴”Šžī”ŲõĄ─ė░ĒæĪŻ
╬╗ų├Ę┤üĄ─é„▀f║»öĄ×ķŻ║

«ö ĪŻę“┤╦Ż¼ę²╚ļ▌^ÅŖĘ┤üŻ¼ļŖÖC▌ö│÷▐DĮ╗š²▒╚ė┌▌ö╚ļļŖē║Ż¼┼cĘ┤ü┴┐│╔š²▒╚Ż¼Č°┼cŃqµ£┴”ŠžĄ─┤¾ąĪ¤oĻPĪŻ
ĪŻę“┤╦Ż¼ę²╚ļ▌^ÅŖĘ┤üŻ¼ļŖÖC▌ö│÷▐DĮ╗š²▒╚ė┌▌ö╚ļļŖē║Ż¼┼cĘ┤ü┴┐│╔š²▒╚Ż¼Č°┼cŃqµ£┴”ŠžĄ─┤¾ąĪ¤oĻPĪŻ
╦┘Č╚Ę┤üĄ─é„▀f║»öĄ×ķŻ║
Ė∙ō■ęį╔ŽĘų╬÷Ż¼ę²╚ļ▌^ÅŖ╦┘Č╚Ę┤üĢrŻ¼ätļŖÖC▌ö│÷ĮŪ╦┘Č╚š²▒╚ė┌▌ö╚ļļŖē║Ż¼Č°┼c’wąąĀŅæB╝┤Ńqµ£┴”ŠžĄ─┤¾ąĪ¤oĻPĪŻ
ę“┤╦Ż¼ČµÖC╬╗ų├┐žųŲŽĄĮyĄ─ŽĄĮyĮYśŗ╚ńłD2╦∙╩ŠĪŻ
3 Ęų═©Ą└PID┐žųŲ
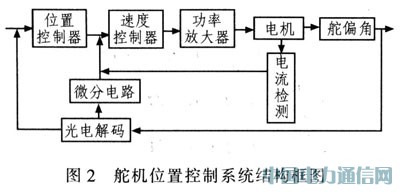
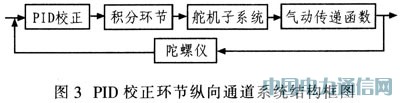
ī¦ÅŚ’wąąū╦æB╩Ū═©▀^┐žųŲī¦ÅŚĄ─3éĆȵ├µ(╝┤╔²ĮĄČµĪóĘĮŽ“ȵĪóØLäėȵ)Ą─Ų½▐DŻ¼Ė─ūāȵ├µĄ─┐šÜŌäė┴”╠žąįŻ¼ą╬│╔ć·└@ī¦ÅŚ┘|ą─Ą─ą²▐DŠžŻ¼īŹ¼F’wąąū╦æBĄ─Ė─ūāĪŻĮŪ╬╗ų├┐žųŲĘų×ķ3éĆ═©Ą└Ż¼Ė®č÷═©Ą└(┐žųŲĖ®č÷ĮŪ)ĪóŲ½║Į═©Ą└(┐žųŲŲ½║ĮĮŪ)ĪóØLäė═©Ą└(┐žųŲØLäėĮŪ)ĪŻ
3.1 ȵÖCĄ─PID┐žųŲ
Ė∙ō■łD2╦∙╩ŠĄ─ȵÖC╬╗ų├┐žųŲŽĄĮyĮYśŗ┐“łDŻ¼ŲõųąļŖ┴„Łh╣Ø▓╔ė├ļŖ┴„ėŗĘ┤üŻ¼▐D╦┘Ę┤üė├╦┘£y░lļŖÖCŻ¼╬╗ų├Ę┤üė├╣ŌļŖŠÄ┤aŲ„ĪŻČµÖC▓╔ė├╚²ķ]Łh┐žųŲįOėŗŻ¼╝┤ļŖ┴„ŁhŻ¼▐D╦┘Łh║═╬╗ų├ŁhĪŻ┐╔ė├“┼RĮń▒╚└²Č╚Ę©”│§▓Į┤_Č©PIDģóöĄĪŻ┤╦ĘĮĘ©▀mė├ė┌ęčų¬ī”Ž¾é„▀f║»öĄĄ─ł÷║ŽŻ¼ķ]║ŽĄ─┐žųŲŽĄĮyųąīóš{╣ØŲ„ų├ė┌╝ā▒╚└²ū„ė├Ž┬ĪŻÅ─┤¾ĄĮąĪųØuĖ─ūāš{╣ØŲ„Ą─▒╚└²Č╚Ż¼Ą├ĄĮĄ╚Ę∙š±╩ÄĄ─▀^Č╔▀^│╠ĪŻ┤╦ĢrĄ─▒╚└²Č╚│╔×ķ┼RĮń▒╚└²Č╚δkŻ¼ŽÓÓÅā╔éĆ▓©ĘÕķgĄ─ĢrķgķgĖ¶ĘQ×ķ┼RĮńš±╩Äų▄Ų┌TkŻ¼ė╔┤╦ėŗ╦Ń│÷Ė„éĆģóöĄŻ¼╝┤KpĪóTiĪóTdĄ─ųĄĪŻ
3.2 ┐vŽ“═©Ą└┐žųŲ
é„ĮyĄ─┐žųŲĘĮ░Ė╩ŪīóȵÖC║å╗»×ķę╗éĆĘ┼┤¾Łh╣ØŻ¼ŽĄĮyāH┤µį┌ĮŪ╦┘Č╚Ę┤üŻ¼Ųõ┐vŽ“═©Ą└é„▀f║»öĄ×ķŻ║

╩ĮųąŻ¼KM×ķé„▀fŽĄöĄŻ¼TM×ķĢrķg│ŻöĄŻ¼ξM×ķŽÓī”ūĶ─ߎĄöĄŻ¼T1×ķÜŌäė┴”│ŻöĄĪŻ
į┌įOėŗŠ½┤_┐╝æ]ȵÖCŁh╣ØĄ─┐vŽ“═©Ą└ĢrŻ¼ąĶ╝ė╚ļPIDąŻš²Łh╣ØŻ¼Ęų╬÷ŽĄĮy╩╣ŲõØMūŃįOėŗę¬Ū¾Ż¼łD3×ķŲõ┐žųŲŽĄĮyĮYśŗ┐“łDĪŻ
3.3 ÖMŽ“═©Ą└┐žųŲ
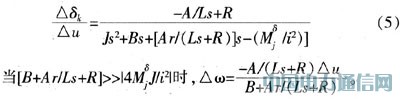
«öØLäė═©Ą└Ą─▌ö╚ļųĖ┴Ņ×ķ┴ŃĢrŻ¼╝┤▒Ż│ųØLäėĮŪ║═ĮŪ╦┘Č╚×ķ┴ŃŻ¼ätŽ¹│²┴╦Ė®č÷═©Ą└║═Ų½║Į═©Ą└Ą─±Ņ║Žū„ė├Ż¼┐╔Ęųäe┐žųŲ3éĆ═©Ą└ĪŻ┤╦ĢrŻ¼ī”ĘQĮYśŗī¦ÅŚĄ─Ė®č÷═©Ą└║═Ų½║Į═©Ą└Ą─┐žųŲ╗∙▒ŠŽÓ═¼ĪŻ
3.4 ØLäė═©Ą└┐žųŲ
īóȵÖCŁh╣Øę²╚ļØLäė═©Ą└Ż¼┼c┐vŽ“═©Ą└╝░║ĮŽ“═©Ą└ŅÉ╦ŲŻ¼ę²╚ļPIDąŻš²Łh╣ØŻ¼Ęų╬÷ŽĄĮyŻ¼ŲõĮŪ╦┘Č╚é„▀f║»öĄ×ķŻ║

╩ĮųąŻ¼KMx×ķé„▀fŽĄöĄŻ¼TMx×ķāAą▒Ģrķg│ŻöĄĪŻ
4 Ę┬šµĮY╣¹
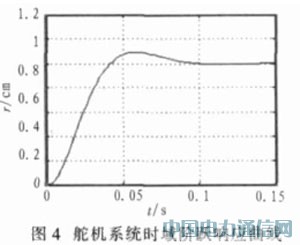
×ķ“×ūC┐žųŲĘĮ░ĖĄ─š²┤_ąį║═┐žųŲą¦╣¹Ż¼ätĮoČ©ęįŽ┬ī¦ÅŚģóöĄŻ║KM=0.171 7(1/s)ĪóTM=0.085 0(s)ĪóξM=0.111 2ĪóT1=6.521 7(s)ĪóKMx=170.778 9ĪóTMx=1.006 3(s)Ęųäeī”ȵÖCŽĄĮyĪó┐vŽ“═©Ą└ŽĄĮyĪóÖMŽ“═©Ą└ŽĄĮyĪóØLäė═©Ą└ŽĄĮy╝ė╚ļå╬╬╗ļA▄Są┼╠¢▀MąąöĄūųĘ┬šµŻ¼▓óī”é„Įy┐žųŲŽĄĮy▀MąąĘ┬šµŻ¼ī”▒╚┐žųŲĮY╣¹ĪŻłD4×ķȵÖCŽĄĮyĢrė“ļA▄SĒææ¬Ū·ŠĆĪŻė╔łD4Ę┬šµŪ·ŠĆ┐┤│÷Ż¼│¼š{┴┐9.5%Ż¼╔Ž╔²Ģrķg41.9 msŻ¼š{╣ØĢrķg(2%š`▓ŅĦ)88.8 msŻ¼ĘĆæBš`▓Ņ×ķ0ĪŻ
łD5×ķ┐vŽ“═©Ą└Ģrė“ļA▄SĒææ¬Ū·ŠĆŻ¼Å─łD5Ę┬šµŪ·ŠĆ┐╔┐┤│÷Ż¼į┌Š½┤_┐╝æ]ȵÖCŁh╣ØŪķørŽ┬Ż¼PIDąŻš²Łh╣Ø┐vŽ“═©Ą└Ģrė“ļA▄SĒææ¬Ū·ŠĆĘ┤æ¬┴╝║├Ż¼│¼š{┴┐11.4%Ż¼╔Ž╔²Ģrķg170.6 msš{╣ØĢrķg(2%š`▓ŅĦ)356.3 msŻ¼ĘĆæBš`▓Ņ×ķ0ĪŻ

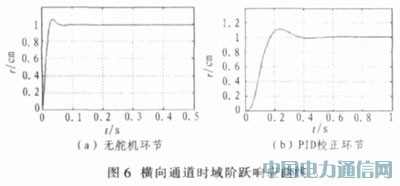
łD6×ķÖMŽ“═©Ą└Ģrė“ļA▄SĒææ¬Ū·ŠĆĪŻÅ─łD6Ę┬šµŪ·ŠĆ┐┤│÷Ż¼į┌Š½┤_┐╝æ]ȵÖCŁh╣ØŪķørŽ┬Ż¼PIDąŻš²Łh╣ØÖMŽ“═©Ą└Ģrė“ļA▄SĒææ¬Ū·ŠĆĘ┤æ¬┴╝║├Ż¼│¼š{┴┐11.4%Ż¼╔Ž╔²Ģrķg168.3 msš{╣ØĢrķg(2%š`▓ŅĦ)347.1 msŻ¼ĘĆæBš`▓Ņ×ķ0ĪŻ
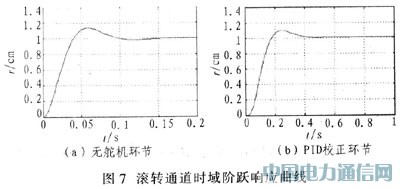
łD7×ķØL▐D═©Ą└Ģrė“ļA▄SĒææ¬Ū·ŠĆĪŻÅ─łD7Ą─Ę┬šµŪ·ŠĆ┐╔┐┤│÷Ż¼į┌Š½┤_┐╝æ]ȵÖCŁh╣ØĄ─ŪķørŽ┬Ż¼PIDąŻš²Łh╣ØØL▐D═©Ą└Ą─Ģrė“ļA▄SĒææ¬Ū·ŠĆĘ┤æ¬┴╝║├Ż¼│¼š{┴┐9.81%Ż¼╔Ž╔²Ģrķg×ķ178.6 msŻ¼š{╣ØĢrķg(2%š`▓ŅĦ)397.1 msŻ¼ĘĆæBš`▓Ņ×ķ0ĪŻ
5 ĮYšō
▒Š╬─└¹ė├┼RĮń▒╚└²Č╚Ę©Ą├ĄĮPIDģóöĄŻ¼└¹ė├MATLAB/Simulink▀MąąĢrė“Ę┬šµŻ¼Å─Ę┬šµĮY╣¹┐┤Ż¼įōPIDĘų═©Ą└┐žųŲĘĮĘ©┐╔ęį╠ßĖ▀é„ĮyÜŌäėȵī¦ÅŚ┐žųŲŽĄĮyĄ─£╩┤_ąįĪó┐ņ╦┘ąį╝░ĘĆČ©ąįĪŻ«ö╚╗▀@ų╗╩ŪĮo│÷┼cé„Įy┐žųŲĘĮ░ĖŽÓ▒╚▌^Ą─ĮY╣¹Ż¼īŹļHĄ─ģóöĄ▀Ćę¬į┌īŹ╬’Ę┬šµųą▓╗öÓš{įćŻ¼▓óī”┐žųŲŽĄĮyą▐š²Ė─▀MŻ¼ęįĄ├ĄĮ┴Ņ╚╦ØMęŌĄ─┐žųŲą¦╣¹ĪŻĘ┬šµĮY╣¹▒Ē├„Ż¼Ė„═©Ą└ŽĄĮyĘ┤ė│┴╝║├Ż¼─▄ē“īŹ¼FīŹĢr┐žųŲę¬Ū¾ĪŻ





