š¬ę¬Ż║╗∙ė┌TI╣½╦ŠĄ─CC2530īŹ¼F┴╦IEEE 802.15.4(ZigBee)Ą─¤oŠĆé„ĖąŲ„ŠWĮj(Wireless Sensor NetworkŻ¼WSN)ģfūhŻ╗į┌Ęų╬÷CSMA-CA╦ŃĘ©Ą─╗∙ĄA╔ŽŻ¼ųž³cėæšō┴╦Ų¼ā╚╝»│╔Ą─├³┴Ņ▀x═©/CSMA-CA╠Ä└ĒŲ„Ą─╣żū„ÖCųŲŻ¼═¼ĢrĮMĮ©┴╦ę╗éĆąĪą═ąŪĀŅŠWĮjĪŻ£yįćĮY╣¹▒Ē├„Ż¼į┌╣سc═©ą┼ĘČć·ā╚Ż¼╣سc╩š░lĄ─│╔╣”┬╩║═š²┤_┬╩Š∙▀_ĄĮ┴╦100%ĪŻ
0 ę²čį
╗∙ė┌IEEE 802.15.4Ą─¤oŠĆé„ĖąŲ„ŠWĮj(Wireless Sensor NetworkŻ¼WSN)╩ŪŠC║Ž┴╦é„ĖąŲ„╝╝ągĪóą┼Žó╠Ä└Ē╝╝ąg║═¤oŠĆ═©ą┼╝╝ągŻ¼▓╔ė├┤¾┴┐Ą─╣سcĖ▓╔w▒O£yģ^ė“Ż¼ą╬│╔ę╗éĆūįĮM┐ŚŠWĮjŽĄĮyŻ¼─┐Ū░ęčį┌ūįäė┐žųŲĪóŁhŠ│▒O£yĄ╚ŅIė“Ą├ĄĮÅVĘ║Ą─æ¬ė├ĪŻį┌ī”¤oŠĆé„ĖąŲ„ŠWĮjMACīė╔Ņ╚ļ蹊┐Ą─╗∙ĄA╔ŽŻ¼ĮY║ŽTI╣½╦ŠSoCąŠŲ¼CC2530Ż¼īŹ¼F┴╦╣سcķgĄ─³cī”³c═©ą┼╣”─▄Ż¼×ķ蹊┐╔Žīėģfūh┤“Ž┬┴╦╗∙ĄAĪŻ
1 CC2530ąŠŲ¼║åĮķ
CC2530╩ŪTI╣½╦Šßśī”2.4GHz ISMŅlĦ═Ų│÷Ą─Ą┌Č■┤·ų¦│ųZigBee/IEEE 802.15.4ģfūhĄ─Ų¼╔Ž╝»│╔ąŠŲ¼ĪŻŲõā╚▓┐╝»│╔┴╦Ė▀ąį─▄╔õŅl╩š░lŲ„Īó╣żśIś╦£╩į÷ÅŖą═8051MCUā╚║╦Īó256KB Flash ROM║═8KB RAMĪŻŲõų„ę¬╠žąįŻ║Š▀ėą2éĆUSARTĪó8╬╗║═16╬╗Č©ĢrŲ„Īó┐┤ķT╣ĘČ©ĢrŲ„Īó8┬Ę▌ö╚ļ┐╔┼õų├Ą─12╬╗ADCĪó21éĆGPIOĪóAES128ģf═¼╠Ä└ĒŲ„Ż¼ė▓╝■ų¦│ųCSMA-CAĪóöĄūų╗»Ą─RSSI/LQI║═ÅŖ┤¾Ą─DMA╣”─▄Ż¼Š▀éõļŖ│ž▒O£y║═£žČ╚Ėą£y╣”─▄Ż╗ų¦│ų5ĘN╣żū„─Ż╩ĮŻ¼Ūę▐DōQĢrķgČ╠Ż¼┐╔ęį▌^║├ĄžØMūŃ│¼Ą═╣”║─ŽĄĮyĄ─ę¬Ū¾Ż╗į┌Įė╩š║═░l╦═─Ż╩ĮŽ┬Ż¼ļŖ┴„ōp║─Ęųäe×ķ24mA║═29mAĪŻė╔ė┌Ųõė▓╝■įOėŗ║åå╬Ż¼ĘŌčbąĪŻ¼╣”║─Ą═Ż¼į┌¤oŠĆé„ĖąŲ„ŠWĮjųąĄ├ĄĮ┴╦įĮüĒįĮÅVĘ║Ą─æ¬ė├ĪŻ
2 CSMA-CAÖCųŲ
IEEE 802.15.4ģfūhųą▓╔ė├CSMA-CAÖCųŲüĒ▒▄├ŌöĄō■ø_═╗ĪŻĖ∙ō■╩Ūʱ▓╔ė├ą┼ś╦Ż¼ŠWĮjĘų×ķĘŪą┼ś╦ŠWĮj║═ą┼ś╦ŠWĮjā╔ĘNĪŻĘŪą┼ś╦─Ż╩ĮŽ┬Ż¼╣سc╩╣ė├CSMA-CAÖCųŲĖéĀÄą┼Ą└Ż║╣سcļSÖC═╦▒▄ę╗Č╬ĢrķgŻ¼ł╠ąąCCA(┐šķeą┼Ą└įu╣└)Ż¼╚¶ą┼Ą└IDLEäté„╦═öĄō■Ż¼╚¶ą┼Ą└BUSYätųžą┬Ą╚┤²ę╗Č╬ļSÖCĢrķg║¾ł╠ąąCCAĪŻ
į┌ą┼ś╦ŠWĮjųąŻ¼īó│¼Ä¼äØĘų┴╦16éĆĢrŽČŻ¼ę“┤╦ł╠ąąĄ─═╦▒▄ĢrķgČ╝╩ŪęįĢrŽČ×ķå╬╬╗Ż¼CCAį┌═╦▒▄ų▄Ų┌Ą─▀ģĮń╠Äķ_╩╝ł╠ąąĪŻłD1╩ŪIEEE 802.15.4ś╦£╩ęÄČ©Ą─CSMA-CA╦ŃĘ©┴„│╠ĪŻ

├┐éĆ╣سcį┌├┐┤╬ćLįćé„▌öĢrČ╝ąĶꬊSūo3éĆūā┴┐Ż║║¾═╦┤╬öĄNBĪóĖéĀÄ┤░┐┌CW║═║¾═╦ųĖöĄBEĪŻūā┴┐NB╩ŪćLįć«öŪ░ļ░l╦═▀^│╠ųąCSMA-CA╦ŃĘ©ł╠ąąļSÖC═╦▒▄Ą─┤╬öĄŻ¼├┐éĆą┬Ą─é„▌öćLįćų«Ū░NBæ¬│§╩╝╗»×ķ0ĪŻį┌IEEE802.15.4ųąŻ¼Č©┴xNBĄ─ūŅ┤¾ųĄ×ķ4Ż¼╚ń╣¹╣سcĮø▀^4┤╬ą┼Ą└├”┬Ą═╦▒▄║¾╚į╚╗¤oĘ©Įė╚ļ▀MąąöĄō■é„╦═Ż¼ätĘ┼ŚēöĄō■é„╦═Ż¼▓óŽ“╔Žīėł¾ĖµĪŻūā┴┐CW╩ŪĖéĀÄ┤░┐┌Ą─ķLČ╚Ż¼╦³▒Ē╩Šį╩įS░l╦═Ū░ę¬Ū¾ą┼Ą└▀B└m┐šķeĄ─ĢrķgŻ¼ų╗ė├ė┌ĢrŽČCSMA-CA╦ŃĘ©Ż¼┐╔ęįĮo╠Ä└ĒŲ„╠Ä└Ē▓╗═¼ĢrŽČ┴¶ėąĢrķg▒ŻūoĦŻ¼ęį├ŌöĄō■ļø_═╗ĪŻBEųĄĄ─┤¾ąĪė░Ēæ╣سcĮė╚ļą┼Ą└Ą──▄┴”Ż¼╚¶įOų├Ą├▀^ąĪŻ¼Ų▓╗ĄĮĮĄĄ═ø_═╗Ą─ū„ė├Ż╗įOų├Ą├▀^┤¾Ż¼čėĢrū„ė├▓╗├„’@ĪŻIEEE 802.15.4═Ų╦]Ą──¼šJųĄ×ķ3Ż¼ūŅ┤¾ųĄ×ķ5ĪŻ«öBEįO×ķ0ĢrŻ¼ätų╗▀Mąąę╗┤╬┼÷ū▓Öz£yĪŻ
3 ├³┴Ņ▀x═©ģf╠Ä└ĒŲ„
CC2530Ų¼╔Ž╝»│╔Ą─├³┴Ņ▀x═©ģf╠Ä└ĒŲ„(CSP)╠ß╣®┴╦MCU║═¤oŠĆļŖų«ķgĄ─Įė┐┌Ż¼ėą┴ó╝┤▀x═©├³┴Ņ║═│╠ą“ł╠ąąā╔ĘN─Ż╩ĮŻ¼┐╔ęį╠Ä└ĒMCU░l│÷Ą─├³┴ŅĪŻ═¼Ģr▀Ćėąę╗éĆ24ūų╣ØĄ─│╠ą“┤µā”Ų„Ż¼┼õ║ŽMACČ©ĢrŲ„ūįäėł╠ąąCSMA-CA╦ŃĘ©Ż¼│õ«öMCUĄ─ģf╠Ä└ĒŲ„ĪŻCSPÅ═╬╗║¾Ż¼ųĖ┴ŅīæųĖßśÅ═╬╗ĄĮ╬╗ų├0Ż¼į┌├┐┤╬RFSTīæ╚ļŲ┌ķgųĖ┴ŅīæųĖßś└█╝ė1Ż¼ų▒ĄĮ│╠ą“┤µā”Ų„Ą─ĮK³cĪŻ┴Ē═ŌŻ¼CSP▀Ćėą4éĆ╝─┤µŲ„Ż║CSPTĪóCSPXĪóCSPY║═CSPZĪŻMCU┐╔ęįī”╦³éāūxīæŻ¼įOų├CSP▀\ąą╦∙ąĶĄ─ģóöĄĪŻ│╠ą“ł╠ąą─Ż╩ĮŽ┬▀\ąąę╗éĆCSPĄ─┴„│╠╚ńłD2╦∙╩ŠĪŻ

4 ╣سc═©ą┼īŹ¼F
4.1 ═©ą┼ÖCųŲ
CC2530╩Ū═©▀^╝─┤µŲ„TXFIFO║═RXFIFOüĒīŹ¼FöĄō■╩š░lĄ─ĪŻ░l╦═öĄō■ĢrŻ¼═∙TXFIFOųąīæ╚ļöĄō■Ż¼¤oŠĆļŖ─ŻēKūįäė╠Ē╝ėPHYīė═¼▓ĮŅ^║═FCSŻ¼═©▀^▀x═©├³┴ŅSTXON╗“STXONCCA░l╦═öĄō■Ż╗öĄō■Įė╩š═Ļ│╔ĢrŻ¼«a╔·RXPKTDONEųąöÓŻ¼į┌ųąöÓĘ■äš│╠ą“ųą═©▀^ūx╚ĪRXFIFO╝┤┐╔ĪŻ
▒Š╬─Ė∙ō■IEEE 802.15.4ģfūhŻ¼Č©┴x┴╦Š½║åĄ─MACīėļĖ±╩ĮŻ¼╚ńłD3╦∙╩ŠĪŻ
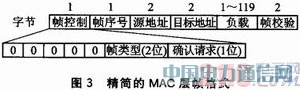
ļ┐žųŲė“š╝ę╗éĆūų╣ØĪŻŲõųąŻ¼Ä¼ŅÉą═š╝2╬╗Ż¼00▒Ē╩Š═¼▓ĮļŻ¼01▒Ē╩ŠöĄō■ļŻ¼10▒Ē╩Š┤_šJļŻ¼11▒Ē╩Š├³┴ŅļŻ╗┤_šJšłŪ¾š╝1╬╗Ż¼1▒Ē╩ŠĮė╩šįOéõį┌Įė╩šĄĮöĄō■ļ╗“├³┴ŅļĢr╚ń╣¹┼ąöÓŲõ×ķėąą¦Ä¼Š═ꬎ“░l╦═įOéõĘ┤üę╗éĆ┤_šJļŻ¼0▒Ē╩ŠįōĮė╩šįOéõ▓╗ąĶę¬Ę┤ü┤_šJļĪŻÄ¼ą“╠¢╬©ę╗ś╦ūRĖ„éĆļŻ¼ė├ė┌┤_šJļ║═öĄō■ļ╗“├³┴ŅļĄ─Ųź┼õĪŻ─┐ś╦ĄžųĘ║═į┤ĄžųĘĘųäeė├2éĆūų╣Ø▒Ē╩ŠĪŻė╔ė┌IEEE 802.15.4ęÄĘČųąČ©┴x┴╦╬’└ĒĘ■äšöĄō■å╬į¬(PSDU)Ą─ūŅ┤¾ķLČ╚×ķ127ūų╣ØŻ¼Č°ŲõųąĄ─8ūų╣ØęčĮø▒╗╩╣ė├Ż¼ę“┤╦ėąą¦žō▌d(pay-load)Ą─ūų╣ØķLČ╚×ķ1Ī½119ūų╣ØĪŻ
öĄō■░l╦═ėą3ĘN─Ż╩ĮŻ║ĘŪCSMA-CAĪóĢrŽČCSMA-CA║═ĘŪĢrŽČCSMA-CAĪŻ┤²öĄō■░┤╔Ž╩÷Ė±╩Įīæ╚ļTXFIFC)║¾Ż¼ł╠ąą“RFST—ISTXON”åóäėCSP│╠ą“ĪŻ
ęįŽ┬×ķ╗∙ė┌ĢrŽČCSMA-CA─Ż╩ĮĄ─CSP│╠ą“┤·┤aŻ║

4.2 īŹ“×ĮY╣¹
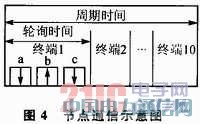
▒ŠŠWĮj╩Ūė╔ę╗éĆųąą─╣سc╝░10éĆĮKČ╦╣سcĮM│╔Ą─ąŪĀŅŠWĪŻė▓╝■▓╔ė├ė╔CC2530ųŲū„Ą─é„ĖąŲ„░ÕŻ¼£yįćöĄō■ė╔Ų¼ā╚ūįĦĄ─£žČ╚é„ĖąŲ„╠ß╣®ĪŻ
╚ńłD4╦∙╩ŠŻ¼ųąą─╣سc▓╔ė├▌åįāĄ─ĘĮ╩Į▓╔╝»ĮKČ╦öĄō■Ż¼═©▀^┤«┐┌’@╩ŠĄĮ╔Ž╬╗ÖC▄ø╝■╔ŽĪŻŲõųąŻ¼a┤·▒Ēųąą─╣سc░l╦═Ą─├³┴ŅļŻ╗b×ķ╔Žé„Ą─öĄō■ļŻ╗c×ķųąą─╣سc░l╦═Ą─┤_šJļĪŻĮKČ╦╣سc▓╔ė├ĘŪĢrŽČCSMA-CAĄ─ĘĮ╩Į░l╦═öĄō■ĪŻ
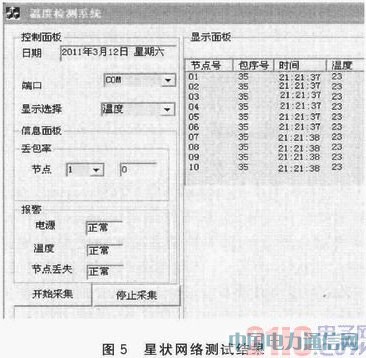
łD5╦∙╩Š£yįćĮY╣¹▒Ē├„Ż║į┌╣سc═©ą┼░ļÅĮā╚Ż¼«ö▌åįāĢrķg┤¾ė┌Ą╚ė┌15.36msĢrŻ¼╣سcķg═©ą┼╬┤üG╩¦╚╬║╬öĄō■░³Ż¼Ūęø]ėąš`┤a¼FŽ¾ĪŻļSų°╣سcŠÓļxį÷┤¾Ż¼╣سcüG░³┬╩ųØu╔Ž╔²ĪŻų▄Ų┌ĢrķgļSų°╣سcĄ─į÷ČÓČ°į÷┤¾Ż¼čėĢrĘe└█├„’@ĪŻ
5 ĮYšZ
▒Š╬─įOėŗ┴╦╗∙ė┌CC2530Ą─¤oŠĆé„ĖąŲ„ŠWĮj╣سcŻ¼▓óįö╝ÜĮķĮB┴╦ā╔éĆ╣سcų«ķg³cī”³c═©ą┼Ą─īŹ¼FŻ¼═¼Ģrī”CSMA-CA╦ŃĘ©▀Mąą┴╦įö╝Üšf├„ĪŻīŹ“×ĮY╣¹▒Ē├„╣سc─▄ē“š²│Ż═©ą┼ĪŻ
▒Š╬─×ķ▀Mę╗▓ĮĄ─╔Žīė═©ą┼ģfūhįOėŗ╠ß╣®┴╦╗∙ĄAŻ¼Š▀ėąę╗Č©Ą─ģó┐╝ārųĄĪŻ





