š¬ę¬Ż║║åę¬ĻU╩÷Į³─ĻüĒ¤oŠĆé„ĖąŠWĮjĢrķg═¼▓Į╦ŃĘ©Ą─░lš╣Ūķør║═ė░Ēæ¤oŠĆé„ĖąŠWĮjĢrķg═¼▓ĮĄ─ę“╦ž║¾Ż¼ųž³cĮķĮB┴╦─┐Ū░ÄūĘN▒╚▌^Ąõą═Ą─Ģrķg═¼▓Į╦ŃĘ©Ż¼▓óī”ŲõŠ½Č╚Īó╣”║─ęį╝░Ė„ūįĄ─ā×╚▒³c▀Mąą┴╦▌^įö╝ÜĄ─Ęų╬÷ĪŻį┌╠žČ©Ą─ŠWĮjųąŻ¼æ¬įōī”Š½Č╚┼c╣”║─▀Mąąš█ųą┐╝æ]ĪŻūŅ║¾╠Įėæ┴╦╬┤üĒ┐╔─▄Ą─░lš╣ĘĮŽ“ĪŻ
ę²čį
▒Ż│ų╣سcų«ķgĢrķg╔ŽĄ─═¼▓Įį┌¤oŠĆé„ĖąŲ„ŠWĮjųąĘŪ│Żųžę¬Ż¼╦³╩Ū▒ŻūCöĄō■┐╔┐┐é„▌öĄ─Ū░╠ßĪŻNTPģfūh╩Ū─┐Ū░ę“╠žŠW╔Ž▓╔ė├Ą─Ģrķg═¼▓Įģfūhś╦£╩Ż¼╣”║─┤¾Ż¼▓╔ė├ėąŠĆé„▌öŻ¼▓╗▀m║Žė├ė┌╣”║─Īó│╔▒Š╩▄Ž▐ųŲĄ─¤oŠĆé„ĖąŠWĮjųąĪŻGPSŽĄĮyę▓┐╔ęį╠ß╣®Ė▀Š½Č╚Ą─Ģrķg═¼▓ĮŻ¼Ą½╦³Ą─ą┼╠¢┤®═Ėąį▓ŅŻ¼GPS╠ņŠĆ▒žĒÜ░▓čbį┌┐šĢńĄ─ĄžĘĮŻ¼╣”║─ę▓▌^┤¾Ż¼╦∙ęį▓╗▀m║Ž¤oŠĆé„ĖąŠWĮjĪŻ
ElsonĄ╚╚╦2002─Ļ╩ū┤╬╠ß│÷¤oŠĆé„ĖąŲ„ŠWĮjĢrķg═¼▓ĮĄ─蹊┐šnŅ}ęįüĒŻ¼ęčėąŽÓ«öČÓĄ─Ąõą═Ģrķg═¼▓Į╦ŃĘ©Ż¼ų„ę¬┐╔ęįĘų×ķęįŽ┬ÄūŅÉŻ║╗∙ė┌░l╦═š▀ę╗Įė╩šš▀Ą─ļpŽ“═¼▓Į╦ŃĘ©Ż¼Ąõą═╦ŃĘ©╚ńTPSN(Timing-Sync Protocol for Sensor Networks)╦ŃĘ©Ż╗╗∙ė┌░l╦═š▀ę╗Įė╩šš▀Ą─å╬Ž“Ģrķg═¼▓Į╦ŃŻ¼Ąõą═╦ŃĘ©╚ńFTSP(Flooding Time Synclaronization Protocol)╦ŃĘ©ĪóDMTS(Delay Measurement Time Synchronization)╦ŃĘ©Ż╗╗∙ė┌Įė╩šš▀ę╗Įė╩šš▀Ą─═¼▓Į╦ŃĘ©Ż¼Ąõą═╦ŃĘ©ėąRBS(Reference Broadcast Synchronization)╦ŃĘ©ĪŻ
Į³─ĻüĒĖ∙ō■ęį╔ŽÄūĘNĄõą══¼▓Į╦ŃĘ©Ż¼▀Ćėą╚╦╠ß│÷┴╦Ęų┤ž╩ĮĄ─īė┤╬ą══žōõĮYśŗ╦ŃĘ©Ż¼ęį╝░ĮY║Ž╔·│╔śõĄ╚üĒ╠ßĖ▀š¹éĆŠWĮjĄ─ąį─▄Ż¼╚ńLTS(Li-glatweight time synchronization)╦ŃĘ©ĪóCHTS(Cluster-based Hierarehical Time Synchronization)╦ŃĘ©ĪóCRIT(Chained-Ripple Time Synchronization)╦ŃĘ©ĪóPBS(The Pairwise Broadcast Synchronization)╦ŃĘ©ĪóHRTS(Hierarchy ReferencingTime Synchronization Pro-toc01)╦ŃĘ©ĪóBTS(Broadcasttime synchronization)╦ŃĘ©ĪóETSP(Energy-efficient Time Synchronization Protocol)╦ŃĘ©Ą╚ĪŻ
╚╗Č°Ż¼¤ošōęį╔Ž═¼▓Į╦ŃĘ©į§śė░lš╣Ż¼Š½Č╚╚ń║╬╠ßĖ▀Ż¼š¹éĆŠWĮj╣”║─į§śėĮĄĄ═Ż¼Č╝╩Ū╗∙ė┌å╬╠°Ģrķg═¼▓ĮÖCųŲĪŻļSų°¤oŠĆé„ĖąŠWĮjĄ─▀\ė├┼c░lš╣Ż¼é„Ėą╣سc¾wĘe▓╗öÓ┐sąĪŻ¼å╬╠°ŠÓļxūāąĪŻ¼š¹¾wŠWĮjęÄ─Żūā┤¾Ż¼═¼▓Įš`▓ŅĄ─└█Ęe¼FŽ¾▒žīóįĮüĒįĮć└ųžŻ¼─┐Ū░ę▓ėą▒╚▌^ą┬Ą─═¼▓Į╦ŃĘ©Ż¼įćłD▒M┴┐▒▄ķ_å╬╠°└█╝ėüĒĮŌøQ▀@ą®å¢Ņ}Ż¼╚ńģfū„═¼▓ĮĪŻ
1 Ģrķg═¼▓Į
1.1 Ģrķg═¼▓Į▓╗┤_Č©ąįĄ─ė░Ēæę“╦ž
Ģrķg═¼▓Į▓╗┤_Č©ąįĄ─ų„ꬥ─ė░Ēæę“╦ž╚ńłD1╦∙╩ŠĪŻ
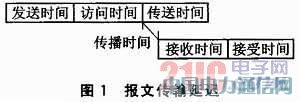
░l╦═ĢrķgŻ║░l╦═ĘĮė├ė┌śŗįņĘųĮM▓óīóĘųĮM▐DĮ╗Įo░l╦═ĘĮĄ─MACīėĄ─ĢrķgĪŻų„ę¬╚ĪøQė┌Ģrķg═¼▓Į│╠ą“Ą─▓┘ū„ŽĄĮyš{ė├Ģrķg║═╠Ä└ĒŲ„žō▌dĄ╚ĪŻ
įLå¢ĢrķgŻ║ĘųĮMĄĮ▀_MACīė║¾Ż¼½@╚Īą┼Ą└░l╦═ÖÓĄ─ĢrķgĪŻų„ę¬╚ĪøQė┌╣▓ŽĒą┼Ą└Ą─ĖéĀÄĪó«öŪ░Ą─žō▌dĄ╚ĪŻ
é„╦═ĢrķgŻ║░l╦═ĘųĮMĄ─ĢrķgŻ¼ų„ę¬╚ĪøQė┌ł¾╬─Ą─ķLČ╚Ą╚ĪŻ
é„▓źĢrķgŻ║ĘųĮMļxķ_░l╦═ĘĮ║¾Ż¼▓óīóĘųĮMé„▌öĄĮĮė╩šĘĮų«ķgĄ─¤oŠĆé„▌öĢrķgĪŻų„ę¬╚ĪøQė┌é„▌öĮķ┘|Īóé„▌öŠÓļxĄ╚ĪŻ
Įė╩šĢrķgŻ║Įė╩šČ╦Įė╩šĄĮĘųĮMŻ¼▓óīóĘųĮMé„╦═ĄĮMACīė╦∙ąĶĄ─ĢrķgĪŻĮė╩▄ĢrķgŻ║╠Ä└ĒĮė╩šĄĮĘųĮMĄ─ĢrķgĪŻų„ę¬╩▄ĄĮ▓┘ū„ŽĄĮyĄ─ė░ĒæĪŻ
1.2 Ąõą═Ģrķg═¼▓Į╦ŃĘ©Ęų╬÷
1.2.1 TPSN╦ŃĘ©Ęų╬÷
TPSN╦ŃĘ©▓╔ė├Ą─╩Ūīė┤╬ą═Ą─ŠWĮjĮYśŗŻ¼╩Ū╗∙ė┌░l╦═š▀ę╗Įė╩šš▀Ą─ļpŽ“═¼▓Į╦ŃĘ©ĪŻĘų│╔ā╔éĆļAČ╬Ż¼Ą┌ę╗ļAČ╬×ķīė┤╬░l¼FļAČ╬Ż¼Ą┌Č■ļAČ╬×ķ═¼▓ĮļAČ╬ĪŻT1ĪóT4ė├üĒėøõø═¼▓Į╣سcĄ─▒ŠĄžĢrķgŻ¼T2ĪóT3ė├üĒėøõøģó┐╝╣سcĄ─▒ŠĄžĢrå¢ĪŻ═¼▓Į╣سcAį┌T1Ģr┐╠Ž“ģó┐╝╣سcB░l╦═ę╗éĆ═¼▓ĮšłŪ¾ł¾╬─Ż¼ł¾╬─ųą░³║¼┴╦═¼▓Į╣سcĄ─╝ēäe║═T1ĪŻ«öģó┐╝╣سcB╩šĄĮł¾╬─║¾Ż¼ėøõøŽ┬Įė╩šĢr┐╠T2Ż¼▓ó┴ó╝┤Ž“═¼▓Į╣سcA╗žÅ═ę╗éĆ═¼▓Įæ¬┤ł¾╬─Ż¼įōł¾╬─ųą░³║¼┴╦ģó┐╝╣سcBĄ─╝ēäe║═T1ĪóT2╝░╗žÅ═Ģr┐╠T3ĪŻ═¼▓Į╣سcA╩šĄĮģó┐╝╣سcĄ─╗žÅ═║¾Ż¼ėøŽ┬Ģr┐╠T4ĪŻ╝┘įOüĒ╗žł¾╬─Ą─é„▌öčė▀tŽÓ═¼Č╝×ķdŻ¼Ūęm×ķ═¼▓Į╣سcį┌T1Ģr┐╠ā╔š▀ų«ķgĄ─ĢrŲ½Ż¼ŪęįOüĒ╗žĢrŲ½ŽÓ═¼Ż¼ė╔T2=T1+m+dŻ¼T4=T3-m+d┐╔Ą├ĄĮŻ║

ätį┌T4Ģr┐╠Ż¼╚¶į┌═¼▓Į╣سcAĄ─▒ŠĄžĢrķgį÷╝ėą▐š²┴┐mŻ¼Š═─▄▀_ĄĮ═¼▓Į╣سcA┼cģó┐╝╣سcBų«ķgĄ─═¼▓ĮĪŻ
1.2.2 RBS╦ŃĘ©Ęų╬÷
RBS╦ŃĘ©╩Ū╗∙ė┌Įė╩šš▀ę╗Įė╩šš▀Ą─═¼▓Į╦ŃĘ©ĪŻ╩ūŽ╚ģó┐╝╣سcÅV▓źę╗éĆģó┐╝ĘųĮMŻ¼«ö═¼▓Į╣سcA╩šĄĮ▀@éĆĘųĮMŻ¼ėøŽ┬ūį╝║Ą─▒ŠĄžĢrńŖ×ķT21Ż¼«ö═¼▓Į╣سcB╩šĄĮ▀@éĆĘųĮMĢrŻ¼ę▓ėøŽ┬ūį╝║Ą─▒ŠĄžĢrńŖ×ķT22Ż¼╚╗║¾═¼▓Į╣سcA┼c═¼▓Į╣سcBĮ╗ōQ▒ŠĄžĢrńŖT21┼cT22Ż¼▀@ĢrŲõųąę╗éĆ╣سcų╗ę¬Ė∙ō■Ģrķg▓ŅųĄm=T21-T22Ż¼ą▐Ė─ūį╝║Ą─ĢrńŖŠ═─▄▀_ĄĮ┼c┴Ēę╗éĆ╣سcų«ķgĄ─═¼▓ĮĪŻį┌ČÓ╠°ŠWĮjųąŻ¼RBS╦ŃĘ©▓╔ė├ČÓ┤╬ÅV▓ź═¼▓ĮŽ¹ŽóŻ¼Įė╩š╣سcĖ∙ō■Įė╩šĄĮ═¼▓ĮŽ¹ŽóĄ─ŲĮŠ∙ųĄŻ¼═¼Ģr▓╔ė├ūŅąĪŲĮĘĮŠĆąį╗žÜwĘĮĘ©▀MąąŠĆąįöM║Žęį£pąĪ═¼▓Įš`▓ŅĪŻ
1.2.3 DMTS╦ŃĘ©Ęų╬÷
DMTS╦ŃĘ©╩Ū╗∙ė┌░l╦═š▀ę╗Įė╩šš▀Ą─å╬Ž“Ģrķg═¼▓Į╦ŃĘ©ĪŻ«ö░l╦═╣سcį┌Öz£yĄĮ═©Ą└┐šķeĢrŻ¼ĮoÅV▓źĘųĮM╝ė╔ŽĢrķg┤┴t0Ż¼Å─Č°┼┼│²┴╦░l╦═╣سcĄ─╠Ä└Ēčė▀t┼cMACīėĄ─įLå¢čė▀tĪŻ▓ó╝┘įO░l╦═ł¾╬─Ą─ķLČ╚×ķNAéĆ▒╚╠ž(░³└©Ū░ī¦┤a┼c═¼▓Įūų)Ż¼é„╦═├┐éĆ▒╚╠žĄ─Ģrķg×ķtŻ¼Č°Įė╩šš▀į┌Įė╩š═Ļ═¼▓Įūų║¾Ż¼ėøõøŽ┬┤╦ĢrĄ─▒ŠĄžĢrķg×ķt1Ż¼▓óį┌š{š¹ūį╝║Ą─▒ŠĄžĢrķgėøõøų«Ū░ėøõøŽ┬┤╦ĢrĄ─Ģr┐╠t2Ż¼▀@ĢrĮė╩š╣سc×ķ┴╦┼c░l╦═╣سc▀_ĄĮĢrķg╔ŽĄ─═¼▓ĮŻ¼┐╔ęįš{š¹Įė╩š╣سcĄ─ĢrķgĖ─×ķt0+t·NA+(t2-t1)ĪŻ
Å─ģó┐╝╬─½IųąŻ¼┐╔ęį┐┤│÷Ż¼╬─š┬ū„š▀į┌╝ėų▌┤¾īW▓«┐╦└¹ĘųąŻĄ─Mica╣سc╔Ž£yįć▀^Ż¼TPSNŲĮŠ∙å╬╠°š`▓Ņ×ķ17.61μsŻ¼DMTSŲĮŠ∙å╬╠°š`▓Ņ×ķ30μsŻ¼RBSŲĮŠ∙å╬╠°š`▓Ņ×ķ6.29μsŻ¼TPSNŲĮŠ∙4╠°š`▓Ņ×ķ21.43μsŻ¼DMTSŲĮŠ∙å╬╠°š`▓Ņ×ķ151μsŻ¼RBSŲĮŠ∙4╠°š`▓Ņ×ķ9.97μSĪŻ
1.2.4 Ųõ╦¹╦ŃĘ©Ęų╬÷
LTSģfūh╩Ū╗∙ė┌░l╦═Ī½Įė╩š═¼▓ĮÖCųŲ░lš╣Č°üĒŻ¼╠ß│÷┴╦╝»ųą╩Į║═Ęų▓╝╩ĮLTSČÓ╠°Ģrķg═¼▓Į╦ŃĘ©ĪŻLTSģfūh╩ūŽ╚░čŠWĮjĮM│╔ÅVČ╚ā׎╚╔·│╔śõ═žōõĮYśŗŻ¼▓óčžų°śõĄ─├┐Śl▀ģ▀Mąąå╬╠°│╔ī”═¼▓ĮĪŻģó┐╝╣سcĄ─ūė╣سc═¼▓Į═Ļ│╔║¾Ż¼ėųęįįō╣سc×ķģó┐╝╣سcŻ¼▓╔ė├═¼śėĘĮ╩Į└^└m═¼▓ĮŽ┬╚źŻ¼ų▒ĄĮ═¼▓Į═Ļ│╔ĪŻ
å╬╠°│╔ī”═¼▓Į▓╔ė├TPSN═¼▓ĮĘĮĘ©ĪŻ│╔ī”═¼▓ĮĄ─┤╬öĄ╩Ū▀ģöĄĄ─ŠĆąį║»öĄĪŻHui DuiĄ╚╚╦╠ß│÷üĒĄ─HRTS└¹ė├┴╦ÅV▓źĄ─╠žąįŻ¼ų╗ąĶę¬ę╗┤╬═¼▓Į▀^│╠┐╔ęį═Ļ│╔ę╗éĆå╬╠°ĮMŠW╦∙ėą╣سcĄ─═¼▓ĮŻ¼▀Mę╗▓ĮĮĄĄ═┴╦LTSģfūhĄ─╣”║─ĪŻHRTS╦ŃĘ©▓╗į┘▓╔ė├ÅVČ╚ā׎╚╔·│╔śõĄ─▀ģŻ¼▓╔ė├Ą─╩ŪÅVČ╚ā׎╚╔·│╔śõĘŪ╚~ūė╣سcéĆöĄĄ─ŠĆąį║»öĄĪŻŽÓ▌^ė┌LTSģfūhŻ¼HRTS╦ŃĘ©ęįĀ▐╔³ę╗Č©Ą─Š½┤_üĒĮĄĄ═┴╦š¹éĆŠWĮjĄ─╣”║─ĪŻ
BTS═¼▓ĮĘĮĘ©ŅÉ╦Ųė┌HRTS╦ŃĘ©Ż¼ę▓╩ŪŽ╚Į©┴óÅVČ╚ā׎╚│╔╔·śõ═žōõĮYśŗŻ¼ų╗▓╗▀^BTS▓╔ė├Ą─╩ŪĢrķg▐DōQ╝╝ągŻ¼ęį▀_ĄĮš¹éĆŠWĮjĄ─Ģrķg═¼▓ĮŻ¼Č°HRTSų▒Įėī”═¼▓Į╣سcĄ─▒ŠĄžĢrķg▀Mąąą▐Ė─Ż¼Ą├ĄĮ╚½ŠWĄ─═¼▓ĮŻ¼═¼▓Įł¾╬─éĆöĄĮĄ×ķHRTSģfūhĄ─2/3ĪŻ
PBS═¼▓Į╦ŃĘ©Ą─╦╝Žļ╩Ūģó┐╝╣سc┼c┤ž╩ū╣سcų«ķg▓╔ė├ļpŽ“═¼▓ĮĘĮĘ©Ż¼┼cTPSNŽÓ╦ŲŻ¼Ųõ╦¹╣سc(į┌ā╔éĆ╣سcĄ─═©ą┼ĘČć·ā╚)┐╔ęįé╔┬ĀĄĮ═¼▓ĮŽ¹ŽóŻ¼Š═┐╔ęįĖ∙ō■Įė╩šš▀ę╗Įė╩šš▀═¼▓ĮĘĮĘ©═¼▓ĮĪŻŅÉ╦Ųė┌RBS═¼▓ĮŻ¼PBS═¼▓ĮĄ─Ū░╠ß╩Ū├┐éĆ═¼▓Į╣سc▒žĒÜį┌┤ž╩ū╣سcĄ─═©ą┼ĘČć·ų«ā╚ĪŻ
ETSP╦ŃĘ©ų„ę¬▓╔ė├Ą─╩ŪįOų├ķTÖæųĄNüĒ▀xō±═¼▓Į╦ŃĘ©Ż¼«öĖĖ╣سcĄ─ūė╣سcąĪė┌╗“Ą╚ė┌NĢrŻ¼▓╔ė├Įė╩š-Įė╩š(RBS)═¼▓Į─Ż╩ĮŻ¼Ę±ät▓╔ė├░l╦═-Įė╩š(TPSN)═¼▓Į─Ż╩ĮĪŻNųĄĄ─▀xō±▓╔ė├ üĒėŗ╦ŃŻ¼╩Įųąm=Rx/TxŻ¼Rx×ķ╣سcĄ─Įė╩š┤╬öĄŻ¼Tx×ķé„▓ź┤╬öĄĪŻ
üĒėŗ╦ŃŻ¼╩Įųąm=Rx/TxŻ¼Rx×ķ╣سcĄ─Įė╩š┤╬öĄŻ¼Tx×ķé„▓ź┤╬öĄĪŻ
FTSP═¼▓Į╦ŃĘ©Š½Č╚Ė▀Ą─įŁę“╩ŪŻ¼░l╦═š▀į┌░l╦═ę╗éĆ═¼▓ĮšłŪ¾ł¾╬─Ģr▀B└mś╦ėø┴╦ČÓéĆĢrķg┤┴Ż¼Įė╩šš▀┐╔ęįĖ∙ō■▀@ÄūéĆųąöÓĢrķgėŗ╦Ń│÷Ė³Š½┤_Ą─ĢrķgŲ½▓ŅĪŻ
1.2.5 ģfū„═¼▓Į╝╝ąg
ęį╔Ž═¼▓ĮÖCųŲŻ¼¤ošōį§śėĖ─▀MČ╝╩Ū╗∙ė┌å╬╠°═¼▓Į╗∙ųŲŻ¼ūŅĮ³ėą╚╦╠ß│÷┴╦ģfū„═¼▓Į╝╝ągŻ¼▓╗į┘å╬╝āĄžÅ─å╬╠°═¼▓ĮÖCųŲ╔Ž▀MąąĖ─▀MŻ¼Č°╩Ū═©▀^ą┼╠¢»B╝ėįŁ└ĒŻ¼╩╣═¼▓Į╗∙£╩╣سc─▄ē“░č═¼▓ĮŽ¹Žóų▒Įė░l╦═ĄĮ▀hĘĮ┤²═¼▓ĮĄ─╣سcŻ¼╩╣▀hĘĮ╣سcų▒Įė┼c╗∙£╩╣سc═¼▓ĮŻ¼Ž¹│²┴╦═¼▓Įš`▓Ņå╬╠°└█╝ėĄ─ĮY╣¹ĪŻHu AĄ╚╚╦ßśī”╣سc├▄Č╚▌^Ė▀Ą─ŠWĮj╠ß│÷┴╦ę╗ĘNģfū„═¼▓Į╦ŃĘ©Ż¼╗∙▒Š╦╝Žļ╩Ūģó┐╝╣سcĖ∙ō■═¼▓Įų▄Ų┌░l│÷méĆ═¼▓Į├}ø_Ż¼Ųõę╗╠°ÓÅŠė╣سc╩šĄĮ▀@éĆŽ¹Žó║¾▒Ż┤µŲüĒŻ¼▓óĖ∙ō■ūŅĮ³Ą─méĆ├}ø_Ą─░l╦═Ģr┐╠ėŗ╦Ń│÷ģó┐╝╣سcĄ─Ą┌m+1éĆ═¼▓ĮŽ¹Žó░l│÷Ą─ĢrķgŻ¼▓óį┌ėŗ╦Ń│÷üĒĄ─Ģr┐╠═¼▓Į┼cģó┐╝╣سc═¼Ģr░l╦═Ą┌m+1éĆ═¼▓ĮŽ¹ŽóĪŻė╔ė┌ą┼╠¢»B╝ėŻ¼ę“┤╦═¼▓Į├}ø_┐╔ęį░l╦═ĄĮĖ³▀hĄ─╣سcŻ¼«ö╚╗Ū░╠ß╩ŪŠWĮjųą╣سc├▄Č╚▌^Ė▀Ą─ŪķørĪŻA.Kr-ohnĄ╚╚╦╠ß│÷┴╦į┌╬’└Ēīė╔Ž├µīŹ¼Fģfū„═¼▓ĮŻ¼ų╗ąĶę¬▒ŠĄžŽ¹ŽóŻ¼▒▄├Ō┴╦Ņ~═ŌĄ─Ž¹Žó═¼▓ĮĮ╗ōQķ_õNĪŻģó┐╝╬─½IūCīŹ┴╦ģfū„═¼▓Įš`▓ŅĄ─ĘĮ▓Ņ┼c╣سc├▄Č╚│╩Ę┤▒╚ĻPŽĄĪŻę“┤╦╣سc├▄Č╚įĮĖ▀═¼▓Įš`▓Ņę▓Ģ■įĮąĪĪŻ
2 Ģrķg═¼▓Į╦ŃĘ©š`▓ŅĘų╬÷┼c▒╚▌^
Ė∙ō■╣سcŽ¹Žóé„▌ö▀^│╠┐╔ęįĄ├ĄĮ╩Į(1)┼c╩Į(2)Ż║
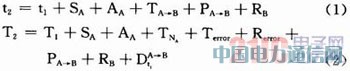
į┌╩Į(1)Īó(2)ųąŻ¼t1Īót2╩Ūė╔ś╦£╩ĢrńŖ╦∙┤_Č©Ą─Ż¼▒Ē╩ŠUTCĢrķgĪŻT1ĪóT2Ęųäe╩Ūt1Īót2╦∙ī”æ¬Ą─▒ŠĄž╣سc╦∙£y│÷Ą─▒ŠĄžĢrķgĪŻSA┤·▒Ē╣سcAĄ─ł¾╬─░l╦═Ģrå¢Ż¼AA╩Ū░l╦═ł¾╬─Ą─įLå¢ĢrķgŻ¼TA→B╩ŪA╣سc░┤▒╚╠žé„▌öł¾╬─┼cB╣سc░┤▒╚╠žĮė╩šł¾╬─╦∙ąĶꬥ─ĢrķgŻ¼PA→B╩Ū╣سcAé„▓źĄĮ╣سcBĄ─ĢrķgĪŻRB╩Ū╣سcBĄ─ł¾╬─Įė╩š╠Ä└Ē▀^│╠ĢrķgĪŻTN╩Ūé„▌öNAéĆ▒╚╠žĄ─┐éĢrķgĪŻTerrorųĖé„▌ö▒╚╠žĄ─š`▓ŅŻ¼Rerror┤“Ģrś╦▀^│╠┤µį┌Ą─š`▓ŅĪŻ ┤·▒Ē╣سcA┼c╣سcBį┌t1Ģr┐╠Ą─ĢrŲ½ĪŻ
┤·▒Ē╣سcA┼c╣سcBį┌t1Ģr┐╠Ą─ĢrŲ½ĪŻ
ī”ė┌TPSN╦ŃĘ©Ż¼ę“×ķį┌MAC▓╔ė├┴╦╝ėĢrķg┤┴ĘĮĘ©Ż¼ę“┤╦Ž¹│²┴╦░l╦═Ģrķg┼cįLå¢Ģrķgī”š`▓ŅĄ─ė░ĒæĪŻę“┤╦ī”TPSN╦ŃĘ©╩Į(1)Īó(2)Š═┐╔ęį║åīæ×ķ╩Į(3)Īó(4)Ż║


ī”ė┌DMTS╦ŃĘ©Ż¼░l╦═╣سcAį┌T0Ģr┐╠Öz£yĄĮ┐šķeŻ¼Įė╩š╣سcBį┌ł¾╬─ĄĮ▀_Ģr┐╠Įoł¾╬─╝ė╔ŽĢrķg┤┴T1Ż¼▓óį┌š{š¹ūį╝║Ą─▒ŠĄžĢrķgėøõøų«Ū░ėøõøŽ┬┤╦ĢrĄ─Ģr┐╠×ķT2Ż¼į┌T3Ģrķg═Ļ│╔š{š¹ĪŻät┐╔ęįĄ├ĄĮŻ║

Å─╩Į(7)ųą┐╔ęį┐┤│÷Ż¼TPSN═¼▓ĮŠ½Č╚Ė▀Ą─įŁę“╩Ūį┌MACīė▓╔ė├┤“Ģrś╦ĘĮ╩ĮŽ¹│²┴╦░l╦═Ģrķg┼cįLå¢ĢrķgĄ─ė░ĒæŻ¼▓óį┌Ž¹ŽóļpĘĮŽ“Į╗ōQĢrŽ¹│²┴╦é„▓źĢrķgĄ─ė░ĒæĪŻ╚▒³c╩Ū³cĄĮ³cų«ķgĄ─═¼▓ĮŻ¼├┐┤╬ų╗─▄ę╗ī”╣سc▀MąąĢrķg═¼▓ĮŻ¼═¼▓Įę╗┤╬ąĶę¬░l╦═2éĆŽ¹ŽóŻ¼Įė╩š2éĆŽ¹ŽóŻ¼╣”║─▌^┤¾ĪŻÅ─╩Į(10)┐╔ęį┐┤│÷DMTS═¼▓Įš`▓Ņ▌^┤¾Ą─įŁę“╩Ūå╬▓źé„▓źŻ¼ø]▐kĘ©Ž¹│²Terror┼cRerrorĄ─ė░ĒæŻ¼Ą½DMTS═¼▓Įę╗┤╬ų╗ꬎ¹║─1éĆ░l╦═Ž¹ŽóŻ¼1éĆĮė╩šŽ¹ŽóŻ¼╣”║─▌^Ą═ĪŻų┴ė┌FTSP═¼▓Į╦ŃĘ©▒╚DMTSĖ▀Ą─įŁę“╩ŪŻ¼░l╦═š▀į┌░l╦═ę╗éĆ═¼▓ĮšłŪ¾ł¾╬─Ģr▀B└mś╦ėø┴╦ČÓéĆĢrķg┤┴Ż¼Įė╩šš▀┐╔ęįĖ∙ō■▀@ÄūéĆųąöÓĢrķgŻ¼ėŗ╦Ń│÷Ė³Š½┤_Ą─ĢrķgŲ½▓ŅĪŻ┐╔ęį┐┤│÷Ż¼RBS═Ļ╚½Ž¹│²┴╦░l╦═ĘĮĄ─ė░ĒæŻ¼ų╗╩Ū═¼▓Įę╗┤╬Ž¹║─3éĆ░l╦═Ž¹ŽóŻ¼4éĆĮė╩šŽ¹ŽóŻ¼╣”║─▌^┤¾ĪŻČ°ī”ė┌HRTS┼cPBS╦ŃĘ©Ż¼Č╝╩ŪŲõė┌ęį╔Ž╦ŃĘ©▀Mąą╚┌║Ž▀\ė├Ż¼į┌┤ž╩ū╣سc┼cūėŠW╣سc▀xō±╔Žū„┴╦▌^┤¾Ą─Ė─▀MŻ¼ęįĮĄĄ═š¹éĆŠWĮjĄ─╣”║─ĪŻ
3 ┐éĮY┼cš╣═¹
Å─ęį╔Ž═¼▓Į╦ŃĘ©Ą─š`▓ŅĘų╬÷▒╚ī”ųą┐╔ęį┐┤│÷Ż¼├┐ĘN╦ŃĘ©Č╝ėąĖ„ūįĄ─ā×╚▒³cŻ¼Č╝▀m║Ž▓╗═¼Ą─¤oŠĆé„ĖąŠWĮjĪŻŠ½Č╚Ė▀Ż¼ŽÓī”╣”║─ę▓▌^┤¾ĪŻī”╠žČ©Ą─¤oŠĆé„ĖąŠWĮjŻ¼▀xō±═¼▓Į╦ŃĘ©Ģræ¬įōš█ųą┐╝æ]Š½Č╚┼c╣”║─ĪŻÅ─š¹¾w╔Ž┐┤Ż¼Į³─ĻüĒėąĻPĢrķg═¼▓Į╦ŃĘ©Ą─蹊┐Ż¼┤¾▓┐ĘųČ╝╩Ū╗∙ė┌ęį═∙Ąõą═Ą─å╬╠°═¼▓Į╦ŃĘ©įŁ└ĒŻ¼▀Mę╗▓ĮÅ─š¹¾wŠWĮjųą┐╝æ]š`▓Ņ┼c╣”║─Ż¼ĮY║ŽūŅā×╔·│╔śõĪóĘų┤ž┬Ęė╔╦ŃĘ©Ą╚Ż¼ęįŲĮŠ∙š¹éĆŠWĮjĄ─╣”║─Ż¼ĮĄĄ═╣سcé„▌öĄ─╠°öĄŻ¼╠ßĖ▀═¼▓ĮĄ─Š½Č╚ĪŻģfū„═¼▓Į╦ŃĘ©é╚ųžė┌╠ßĖ▀š¹éĆŠWĮjĄ─┐╔öUš╣ąį┼cĮĪēčąįŻ¼Ą½ę¬Ū¾╣سcŠ▀ėąŽÓ═¼Ą─═¼▓Į├}ø_Ż¼▒╚▌^└¦ļyŻ¼─┐Ū░▀ĆąĶę¬▀Mę╗▓ĮĄ─░lš╣“×ūCŻ¼ę▓╩Ū╬┤üĒ┐╔─▄║▄║├Ą─░lš╣ĘĮŽ“ĪŻ





