ĪĪĪĪš¬ę¬: ▒Š╬─ßśī”(du©¼)┤¾ą═╗ļŖÖC(j©®)ĮMį┌AGCš{(di©żo)╣Ø(ji©”)ųąžō(f©┤)║╔Ēææ¬(y©®ng)┬²Īó┤µį┌▌^┤¾╝ā▀tčėĄ─¼F(xi©żn)ĀŅŻ¼╠ß│÷┴╦╗∙ė┌ųŪ─▄┼ąöÓ║═ĮŌ±Ņ┐žųŲĄ─ųĖ┴Ņ─Żą═ā×(y©Łu)╗»┐žųŲĘĮ░ĖŻ¼▓óĮY(ji©”)║ŽįōĘĮ░Ėį┌ļŖÅSųą│╔╣”æ¬(y©®ng)ė├Ą─īŹ(sh©¬)└²Ż¼ĻU╩÷┴╦£pąĪžō(f©┤)║╔Ēææ¬(y©®ng)▀tčėŻ¼īŹ(sh©¬)¼F(xi©żn)╚½▀^│╠╗¼ē║Įø(j©®ng)Ø·(j©¼)▀\(y©┤n)ąąĄ─┐žųŲįŁ└ĒĪŻ
ĪĪĪĪĻP(gu©Īn)µIį~: ┤¾ą═ÖC(j©®)ĮM AGC ┐ņ╦┘Ēææ¬(y©®ng) ųĖ┴Ņ─Żą═ā×(y©Łu)╗»
The Research Of Fast Load Responding And Sliding-pressure Control Technique
For The Large Thermal Power Units In The AGC Mode
ĪĪĪĪAbstract: Aim for the long real lag of the unit load's responding in the large thermal power units operating in the AGC mode, a new 'demand-model optimizing control program' is introduced based on the intelligent concluding and decoupling controls. The control theory for the unit's full range sliding-pressure economic running and fast responding is illustrated too. Some successful applications are cited and analyzed.
ĪĪĪĪKeywords: Large units AGC Fast responding Demand-model optimizing
0. ę²čį
ļSų°┤¾ą═╗┴”░l(f©Ī)ļŖ╝╝ąg(sh©┤)Ą─░l(f©Ī)š╣║═│╔╩ņŻ¼ęį╝░ć°(gu©«)╝ęī”(du©¼)╗ļŖÖC(j©®)ĮMĮø(j©®ng)Ø·(j©¼)ąįę¬Ū¾Ą─▓╗öÓ╠ßĖ▀Ż¼┤¾╚▌┴┐ĪóĖ▀ģóöĄ(sh©┤)Ą─░l(f©Ī)ļŖÖC(j©®)ĮMęčųØu│╔×ķļŖ┴”╔·«a(ch©Żn)Ą─ų„┴„įO(sh©©)éõĪŻ░l(f©Ī)ļŖūįäė(d©░ng)┐žųŲŽĄĮy(t©»ng)AGCį┌Ė„ļŖÅSĄ─ÅVĘ║æ¬(y©®ng)ė├Ż¼ī”(du©¼)░l(f©Ī)ļŖÅS▀\(y©┤n)ąą┼cš{(di©żo)Č╚Ą─ūįäė(d©░ng)╗»╦«ŲĮ╠ß│÷┴╦Ė³Ė▀Ą─ę¬Ū¾ĪŻĄ½╩ŪŻ¼┤¾ą═ÖC(j©®)ĮM╦∙╠žėąĄ─ÕüĀt╚▌┴┐┤¾Ż¼ÖC(j©®)ĮMžō(f©┤)║╔Ēææ¬(y©®ng)▀tŠÅĄ╚╠ž³c(di©Żn)Ż¼ģsŽ▐ųŲ┴╦AGCŽĄĮy(t©»ng)Ą─š¹¾wš{(di©żo)╣Ø(ji©”)╦┘Č╚Ż¼ė░Ēæ┴╦ļŖŠW(w©Żng)Ą─ļŖ─▄┘|(zh©¼)┴┐Ż¼│╔×ķ┴╦░l(f©Ī)Īó╣®ļŖŽĄĮy(t©»ng)ķgĄ─ę╗éĆ(g©©)Ų┐ŅiŻ¼ļSų°ąĪ╚▌┴┐╝░╦«ļŖÖC(j©®)ĮMį┌░l(f©Ī)ļŖŽĄĮy(t©»ng)ųą╦∙š╝Ę▌Ņ~Ą─ųØu£pąĪŻ¼▀@ę╗├¼Č▄īó╚šęŖ═╗│÷Ż¼×ķļŖ┴”ŽĄĮy(t©»ng)ūįäė(d©░ng)š{(di©żo)Č╚ĦüĒ▌^┤¾└¦ļyĪŻ┤╦═ŌŻ¼─┐Ū░ć°(gu©«)ā╚(n©©i)┤¾ČÓöĄ(sh©┤)ļŖÅSį┌AGCĘĮ╩ĮŽ┬āH─▄▓╔ė├Č©ē║ĘĮ╩Į▀\(y©┤n)ąąŻ¼╝╚Ž▐ųŲ┴╦AGCųĖ┴ŅĄ─┐╔š{(di©żo)ĘČć·Ż¼ėųĮĄĄ═┴╦ÖC(j©®)ĮM▀\(y©┤n)ąąĄ─Įø(j©®ng)Ø·(j©¼)ąįŻ¼ļSų°AGC▀\(y©┤n)ąąĘĮ╩ĮĄ─Ųš╝░╝░ļŖÅS╣Ø(ji©”)─▄┼cĮø(j©®ng)Ø·(j©¼)▀\(y©┤n)ąąę¬Ū¾Ą─╠ßĖ▀Ż¼▀@ę▓ęč│╔×ķ░l(f©Ī)ļŖÅS┐žųŲŅI(l©½ng)ė“╝▒ąĶĮŌøQĄ─ę╗éĆ(g©©)å¢Ņ}ĪŻ
Įø(j©®ng)▀^į┌šŃĮŁ╩Ī▒▒ü÷Ė█ļŖÅS600MWÖC(j©®)ĮM╝░£žų▌░l(f©Ī)ļŖÅS300MWÖC(j©®)ĮM╔ŽĄ─ķL(zh©Żng)Ų┌įć“×(y©żn)║═蹊┐Ż¼╣Pš▀į┌ī”(du©¼)ÖC(j©®)Ātī”(du©¼)Ž¾╠žąį│õĘųšJ(r©©n)ūR(sh©¬)Ą─╗∙ĄA(ch©│)╔ŽŻ¼ĮY(ji©”)║ŽAGCĘĮ╩ĮĄ─╠ž╩Ō┐žųŲę¬Ū¾Ż¼╠ß│÷┴╦ųĖ┴Ņ─Żą═ā×(y©Łu)╗»┐žųŲĘĮ░ĖŻ¼įōĘĮ░Ė═©▀^Į©┴ó┐žųŲųĖ┴ŅĄ─Ū░ü║═Č©ųĄ─Żą═Ż¼▓╔ė├╚╦╣żųŪ─▄╦╝ŽļŻ¼īŹ(sh©¬)¼F(xi©żn)┴╦ī”(du©¼)žō(f©┤)║╔┼cŲ¹ē║Ą─ā×(y©Łu)╗»┐žųŲŻ¼▓óūŅĮK▀_(d©ó)ĄĮžō(f©┤)║╔┐ņ╦┘Ēææ¬(y©®ng)┼c▀^┴ŃŻ¼Ų¹ē║╚½│╠╩▄┐žŻ¼ÖC(j©®)ĮM╗¼ē║š{(di©żo)╣Ø(ji©”)ĪóĮø(j©®ng)Ø·(j©¼)▀\(y©┤n)ąąĄ─┐žųŲ─┐ś╦(bi©Īo)ĪŻ
1Īó─Żą═ā×(y©Łu)╗»ĘĮ░ĖĄ─╠ß│÷┼cųĖ┴ŅĮ©─Ż
1.1 │ŻęÄ(gu©®)ģf(xi©”)š{(di©żo)ĘĮ╩ĮŽ┬Ą─ŽĄĮy(t©»ng)š{(di©żo)╣Ø(ji©”)╠žąį
▓╔ė├ų▒┤Ą╩ĮųŲĘ█ŽĄĮy(t©»ng)Ą─┤¾╚▌┴┐╗ļŖÖC(j©®)ĮMŻ¼Å─Ė─ūā├║┴┐ĄĮš¶Ų¹┴„┴┐░l(f©Ī)╔·ūā╗»┤µį┌ų°▌^┤¾Ą─╝ā▀tčėŻ¼ī”(du©¼)ė┌300MWÖC(j©®)ĮMŻ¼įō▀tčėę╗░Ńį┌1.0 ~ 2.5 minū¾ėę[1]Ż¼Č°ī”(du©¼)ė┌600MWÖC(j©®)ĮMŻ¼▀tčėĢr(sh©¬)ķgīóĢ■(hu©¼)Ė³ķL(zh©Żng)ĪŻ┤╦═ŌŻ¼«ö(d©Īng)ÖC(j©®)ĮM╠Äė┌╗¼ē║Č╬▀\(y©┤n)ąąĢr(sh©¬)Ż¼▀Ć┤µį┌ę╗éĆ(g©©)ų„Ų¹ē║┴”ūā╗»Ą─▀^│╠Ż¼Å─š¶Ų¹┴„┴┐░l(f©Ī)╔·ūā╗»ĄĮįōūā╗»┴┐Ęe└█ĄĮūŃęį╩╣ų„Ų¹ē║┴”░l(f©Ī)╔·ėąą¦ūā╗»▀ĆīóąĶę¬Ė³ķL(zh©Żng)Ą─Ģr(sh©¬)ķgĪŻę“┤╦Ż¼į┌│ŻęÄ(gu©®)Ą─ģf(xi©”)š{(di©żo)┐žųŲĘĮ╩ĮŽ┬Ż¼×ķĘ└ų╣ų„Ų¹ē║Ž“Ę┤ĘĮŽ“Ų½ļxŻ¼▓╗Ą├▓╗īóŲ¹ÖC(j©®)ųĖ┴Ņū„čėĢr(sh©¬)╠Ä└ĒŻ¼▓óĘ┼īÆŲ¹ē║┐žųŲŲ½▓ŅĄ─į╩įSĘČć·Ż¼ÖC(j©®)ĮM╠Äė┌ę╗ĘN▀tŠÅĄ─Īó▓╗╩▄┐žĄ─ĀŅæB(t©żi)ĪŻ
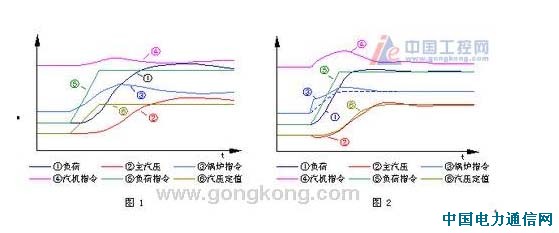
│ŻęÄ(gu©®)ģf(xi©”)š{(di©żo)┐žųŲĘĮ╩ĮŽ┬Ė„ų„ę¬ģóöĄ(sh©┤)Ą─š{(di©żo)╣Ø(ji©”)▀^│╠īó╚ńłD1╦∙╩ŠĪŻė╔ė┌š{(di©żo)ķTäė(d©░ng)ū„ó▄Ą─ė░ĒæŻ¼╩╣ų„Ų¹ē║┴”ó┌Ą─ī”(du©¼)Ž¾╠žąįūāĄ├Å═(f©┤)ļsŻ¼│ŻęÄ(gu©®)Ą─PIDš{(di©żo)╣Ø(ji©”)╣”─▄¤oĘ©š²│ŻīŹ(sh©¬)¼F(xi©żn)ĪŻČ°Ų¹ē║ī”(du©¼)Ž¾▒Š╔Ēėų╩Ūę╗éĆ(g©©)┤¾▀tčėŁh(hu©ón)╣Ø(ji©”)Ż¼š{(di©żo)╣Ø(ji©”)▀^│╠ųą┼cįO(sh©©)Č©ųĄó▐Ą─Ų½▓Ņ▌^┤¾Ż¼ī”(du©¼)ė┌AGCĘĮ╩ĮŽ┬žō(f©┤)║╔ųĖ┴ŅŅlĘ▒ūā╗»Ą─Å═(f©┤)ļs╣żør▀mæ¬(y©®ng)ąį▌^▓ŅĪŻ┤╦═ŌŻ¼įōĘĮ╩ĮūŅų„ꬥ─▒ūČ╦▀Ćį┌ė┌Ųõžō(f©┤)║╔┼cŲ¹ē║Ą─Ēææ¬(y©®ng)╩Ū═¼▓ĮĄ─Ż¼Ų¹ē║┼cžō(f©┤)║╔ūā╗»Ģr(sh©¬)ī”(du©¼)¤ß┴┐Ą─ąĶŪ¾┼c┼┼│Ōę▓╩╝ĮK╩Ū═¼Ž“Ą─Ż¼į┌ūā╗»│§╩╝Č╬Ż¼ā╔š▀ŽÓ╗źųŲ╝sŻ¼«a(ch©Żn)╔·┤¾čėĢr(sh©¬)Ż¼Č°į┌ĮėĮ³─┐ś╦(bi©Īo)žō(f©┤)║╔Ģr(sh©¬)Ż¼ėųŽÓ╗ź╝żäŅ(l©¼)Ż¼įņ│╔▌^┤¾│¼š{(di©żo)ĪŻį┌▀@ĘNĘĮ╩ĮŽ┬Ż¼ŽĄĮy(t©»ng)š¹Č©└¦ļyŻ¼š{(di©żo)╣Ø(ji©”)ŲĘ┘|(zh©¼)▓ŅŻ¼▓╗─▄ØMūŃAGCĘĮ╩ĮŽ┬Ą─╗¼ē║┐žųŲę¬Ū¾ĪŻ
1.2 ųĖ┴Ņ─Żą═ā×(y©Łu)╗»┐žųŲĘĮ░ĖĄ─įO(sh©©)ėŗ(j©¼)╦╝Žļ
ą┬ĘĮ░ĖĄ─╠ß│÷╩Ū╗∙ė┌ęįŽ┬╩┬īŹ(sh©¬)Ż¼╣Pš▀į┌¼F(xi©żn)ł÷(ch©Żng)Ą─įć“×(y©żn)ųą░l(f©Ī)¼F(xi©żn)Ż¼«ö(d©Īng)╚╝┴Ž┴┐░l(f©Ī)╔·ę╗éĆ(g©©)ūŃē“┴┐Ą─Į³╦ŲļA▄SĄ─┐ņ╦┘ūā╗»Ģr(sh©¬)Ż¼Ų¹ē║Ą─Ēææ¬(y©®ng)Ģr(sh©¬)ķgĢ■(hu©¼)┤¾┤¾┐sČ╠Ż¼▀@ę╗³c(di©Żn)į┌▀M(j©¼n)ąąRUNBACKįć“×(y©żn)Ģr(sh©¬)┐╔ęį├„’@ĄžĖąėXĄĮĪŻįŁę“╩Ū«ö(d©Īng)╚╝┴Ž┴┐Ą─╦▓Ģr(sh©¬)ūā╗»▀_(d©ó)ĄĮę╗Č©┴┐Ģr(sh©¬)Ż¼Ātā╚(n©©i)¤ß┴┐Ė─ūā│¼│÷┴╦Āt¾wĄ─¤ß╚▌ąŅ¤ßŻ¼┤╦Ģr(sh©¬)Ė╗ėÓ▓┐ĘųĄ─ūā╗»┴┐─▄▌^┐ņĄž▐D(zhu©Żn)ūā?y©Łu)ķš¶Ų¹┴┐Ą─ūā╗»Ż¼╝ė┐ņ┴╦Ų¹ē║Ą─Ēææ?y©®ng)╦┘Č╚ĪŻĄ½×ķ┴╦£p╔┘╚╝┴Ž┴┐┐ņ╦┘Ė─ūāī”(du©¼)’L(f©źng)¤¤ŽĄĮy(t©»ng)įņ│╔Ą─ø_ō¶Ż¼į┌įōųĖ┴Ņ│¼Ū░┴┐║¾æ¬(y©®ng)įO(sh©©)ų├╦┘┬╩Ž▐ųŲĪŻ▀M(j©¼n)ę╗▓ĮĄ─蹊┐░l(f©Ī)¼F(xi©żn)Ż¼įō┐ņ╦┘ūā╗»┴┐Ą─┤¾ąĪ┼c╔²žō(f©┤)║╔╦┘┬╩Ż©╝┤š{(di©żo)ķTäė(d©░ng)ū„┐ņ┬²Ż®ŠĆąįŽÓĻP(gu©Īn)Ż¼Č°┼cžō(f©┤)║╔ūā╗»┴┐ę▓┤µį┌ę╗Č©Ą─║»öĄ(sh©┤)ĻP(gu©Īn)ŽĄŻ¼▀@╩╣ĘĮ░Ėį┌ČÓūā╣żørŽ┬Ą─īŹ(sh©¬)ļHæ¬(y©®ng)ė├│╔×ķ┐╔─▄ĪŻė╔ė┌Ų¹ē║Ēææ¬(y©®ng)Ą─╝ė┐ņŻ¼į┌žō(f©┤)║╔ųĖ┴Ņūā╗»│§Ų┌Ż¼š{(di©żo)ķT┐╔čĖ╦┘äė(d©░ng)ū„Ė─ūāžō(f©┤)║╔Ż©ęŖłD2 /ó▄Ż®Ż¼╚¶Ātā╚(n©©i)╚╝┴Ž─▄│ų└m(x©┤)▒Ż│ųę╗Č©Ą─│¼Ū░┴┐Ż¼Ų¹ē║īó▓╗Ģ■(hu©¼)«a(ch©Żn)╔·║▄┤¾Ą─žō(f©┤)Ž“Ų½ļxŻ¼═©▀^║Ž└ĒĮ©┴óÕüĀtų„┐žĄ─ųĖ┴ŅŪ░ü─Żą═┐╔īŹ(sh©¬)¼F(xi©żn)ųĖ┴Ņūā╗»│§Ų┌Ą─žō(f©┤)║╔┐ņ╦┘Ēææ¬(y©®ng)ĪŻ
žō(f©┤)║╔Ą─│ų└m(x©┤)ūā╗»ąĶ▓╗öÓĄžĖ─ūāš{(di©żo)ķTŻ¼╣╩Ų¹ē║ļyęį║▄┐ņ«a(ch©Żn)╔·š²Ž“Ą─ūā╗»Ż¼╚¶╚į▓╔ė├│ŻęÄ(gu©®)┐žųŲųąĄ─Ų¹ē║įO(sh©©)Č©ųĄŪ·ŠĆŻ¼ät┤¾Ų½▓Ņī”(du©¼)╚╝┴Ž┴┐┐žųŲĄ─▓╗┤_Č©ė░Ēæę└╚╗┤µį┌ĪŻę“┤╦╣Pš▀╠ß│÷┴╦īóÕüĀtų„┐žųąų¦│ųžō(f©┤)║╔┼cš{(di©żo)╣Ø(ji©”)Ų¹ē║Ą─ā╔ĒŚ(xi©żng)╣”─▄Ęų┴┐▀M(j©¼n)ąąĮŌ±Ņ╠Ä└ĒĄ─╦╝ŽļĪŻęį╔²žō(f©┤)║╔×ķ└²Ż¼╚ńłD2╦∙╩ŠŻ¼ę╗ĘĮ├µ└¹ė├ÕüĀtų„┐žųĖ┴ŅĄ─Ū░ü─Żą═ó█Ż¼Ė∙ō■(j©┤)žō(f©┤)║╔ųĖ┴ŅąĶŪ¾┐ņ╦┘£╩(zh©│n)┤_Ąž╠ß╣®¤ß┴┐ų¦│ųŻ¼┴Ēę╗ĘĮ├µĖ∙ō■(j©┤)ģf(xi©”)š{(di©żo)╣żørŽ┬ų„Ų¹ē║Ą─Ēææ¬(y©®ng)╠žąįŻ¼öM║Ž│÷ŲõĮ³╦ŲŪ·ŠĆū„×ķų„Ų¹ē║Ą─įO(sh©©)Č©ųĄ─Żą═ó▐Ż¼ė╔┐žųŲŲ„Ą─PID╣”─▄═Ļ│╔ų„Ų¹ē║Ą─Š½┤_┐žųŲĪŻ▀@ĘN┐žųŲ╦╝ŽļĄ─▀\(y©┤n)ė├Ż¼Å─Ģr(sh©¬)ķg╔ŽĮŌøQ┴╦žō(f©┤)║╔ó┘┼cų„Ų¹ē║ó┌Ēææ¬(y©®ng)ī”(du©¼)¤ß┴┐Ą─ąĶŪ¾├¼Č▄Ż¼▓óėąą¦ęųųŲ│¼š{(di©żo)Ż¼╠ßĖ▀┴╦Ų¹ē║Ą─┐╔┐žąįŻ¼╩╣Ų¹ÖC(j©®)┼cÕüĀtą╬│╔ę╗ĘNšµš²ęŌ┴x╔ŽĄ─ģf(xi©”)š{(di©żo)┼c╗źča(b©│)ĻP(gu©Īn)ŽĄĪŻ
1.2 ─Żą═Ą─Į©┴ó
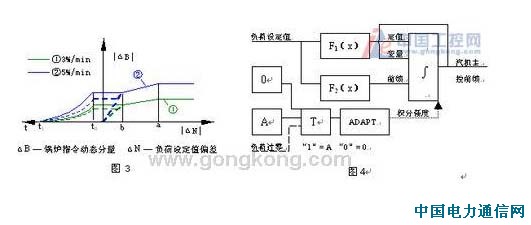
ÕüĀtųĖ┴ŅĄ─Ū░ü─Żą═ė╔╗∙▒Š┴┐┼cäė(d©░ng)æB(t©żi)Ęų┴┐ĮM│╔Ż¼łD2ųą╠ōŠĆ▓┐Ęų×ķ╗∙▒Š┴┐Ż¼ė╔Ė„žō(f©┤)║╔³c(di©Żn)ī”(du©¼)æ¬(y©®ng)Ą─Įø(j©®ng)BTUą▐š²║¾Ą─£╩(zh©│n)┤_╚╝┴Ž┴┐śŗ(g©░u)│╔Ż¼╠ōŠĆęį╔Ž▓┐Ęų×ķ┐ņ╦┘Ēææ¬(y©®ng)Ą─äė(d©░ng)æB(t©żi)Ęų┴┐”żBŻ¼╩Ūžō(f©┤)║╔─┐ś╦(bi©Īo)ųĄ┼cīŹ(sh©¬)ļHžō(f©┤)║╔įO(sh©©)Č©ųĄų«▓Ņ”żNĄ─║»öĄ(sh©┤)Ż¼įō║»öĄ(sh©┤)╚ńłD3╦∙╩ŠŻ¼łDųąÖMū°ś╦(bi©Īo)š²Ž“?y©żn)ķž?f©┤)║╔įO(sh©©)Č©ųĄŲ½▓ŅĄ─Į^ī”(du©¼)ųĄ |”żN| Ż¼žō(f©┤)Ž“?y©żn)ķĢr(sh©¬)ķg▌St Ż¼aĪóbĘųäe┤·▒Ē10%MCR║═3%MCR³c(di©Żn)Ż¼t0╩Ū═©▀^▀ē▌ŗ┼ąöÓ«a(ch©Żn)╔·Ą─žō(f©┤)║╔▀^┴ŃĢr(sh©¬)ķg³c(di©Żn)Ż¼t1ätąĶĖ∙ō■(j©┤)ų„Ų¹ē║Ēææ¬(y©®ng)Ūķør¼F(xi©żn)ł÷(ch©Żng)š¹Č©Ż¼ÕüĀtųĖ┴Ņäė(d©░ng)æB(t©żi)Ęų┴┐”żBĄ─Ę∙ųĄę╗░Ńš¹Č©į┌Ī└3%ų┴Ī└6%ų«ķgŻ¼ī”(du©¼)æ¬(y©®ng)▓╗═¼Ą─ūāžō(f©┤)║╔┬╩į┘│╦ęįŽÓæ¬(y©®ng)Ą─ŽĄöĄ(sh©┤)ĪŻ
ÕüĀt─▄┴┐│ų└m(x©┤)ūŃ┴┐Ą─Ēææ¬(y©®ng)īó═©▀^ęį╔Ž─Żą═Ą├ęį▒ŻšŽŻ¼Ą½ę¬╩╣īŹ(sh©¬)ļHžō(f©┤)║╔Ą─ŲĮŠ∙ūā╗»╦┘┬╩ĮėĮ³žō(f©┤)║╔ųĖ┴ŅĄ─ūā╗»┬╩Ż©╝┤ųĖ┴Ņ3%/minūā╗»Ģr(sh©¬)īŹ(sh©¬)ļHžō(f©┤)║╔ūā╗»┬╩▓╗ąĪė┌2.4%/minŻ®Ż¼ätį┌žō(f©┤)║╔ūā╗»Ą─ųąķgČ╬▒žĒÜŠS│ųīŹ(sh©¬)ļHžō(f©┤)║╔┼cųĖ┴ŅÄū║§═¼╦┘ūā╗»Ż¼┤╦Ģr(sh©¬)å╬æ{Ų¹ÖC(j©®)ų„┐žĄ─PIDš{(di©żo)╣Ø(ji©”)ū„ė├īó¤oĘ©ØMūŃŲ¹ÖC(j©®)š{(di©żo)ķTĄ─äė(d©░ng)ū„ąĶŪ¾Ż¼▒žĒÜĮĶų·ė┌ę╗Č©Ą─ųĖ┴ŅŪ░ü?zh©żn)„ė├ĪŻį┌╔²ž?f©┤)║╔▀^│╠ųą╩╣Ų¹ÖC(j©®)š{(di©żo)ķTį┌ųĖ┴ŅŪ░ü?zh©żn)„ė├Ž┬│ų└m(x©┤)ķ_åóŻ¼ÕüĀt«a(ch©Żn)╔·Ą─¤ß┴┐īóčĖ╦┘▐D(zhu©Żn)ōQ×ķų„š¶Ų¹┴„┴┐▓ó┐ņ╦┘╠ß╔²žō(f©┤)║╔ĪŻŪ░ü┴┐Ą─┤¾ąĪätĖ∙ō■(j©┤)Č©ē║Č╬š{(di©żo)ķTäė(d©░ng)ū„Ę∙Č╚┼cžō(f©┤)║╔ūā╗»┴┐Ą─ī”(du©¼)æ¬(y©®ng)ĻP(gu©Īn)ŽĄš¹Č©ĪŻ
į┌į÷£pžō(f©┤)║╔▀^│╠ųąŻ¼ė╔ė┌╩▄š{(di©żo)ķTäė(d©░ng)ū„Ą─Ė╔ö_Ż¼ÕüĀtų„Ų¹ē║┴”Ą─ī”(du©¼)Ž¾╠žąį░l(f©Ī)╔·┴╦▌^┤¾Ė─ūāĪŻĮø(j©®ng)įć“×(y©żn)Ęų╬÷░l(f©Ī)¼F(xi©żn)Ż¼┤╦Ģr(sh©¬)Ą─ų„Ų¹ē║ī”(du©¼)Ž¾╩Ūę╗éĆ(g©©)Ħ╦└ģ^(q©▒)Ą─Ė▀ļAī”(du©¼)Ž¾Ż¼Ūę╦└ģ^(q©▒)┤¾ąĪ╩▄žō(f©┤)║╔ūā╗»┬╩Īóžō(f©┤)║╔ūā╗»Ę∙Č╚╝░ÖC(j©®)ĮM▀\(y©┤n)ąą╣żørĄ╚ųTČÓę“╦žė░ĒæŻ¼¤oĘ©£╩(zh©│n)┤_╣└╦ŃĪŻ×ķØMūŃų„Ų¹ē║ĮŌ±Ņ┐žųŲĄ─ę¬Ū¾Ż¼▒žĒÜ┤_Č©ų„š¶Ų¹ē║┴”Ą─įO(sh©©)Č©ųĄ─Żą═Ż¼╣Pš▀ęįČ■ļAæTąįŁh(hu©ón)╣Ø(ji©”)ī”(du©¼)Ė▀ļAī”(du©¼)Ž¾ėĶęįĮ³╦ŲŻ¼į┘▌oęįŲ¹ē║Ų╩╝╦└ģ^(q©▒)Ą─ųŪ─▄▀ē▌ŗ┼ąöÓŻ¼śŗ(g©░u)įņ│÷┴╦ūŃē“Š½Č╚Ą─ų„Ų¹ē║įO(sh©©)Č©ųĄ─Żą═Ż¼▓óį┌īŹ(sh©¬)ļHæ¬(y©®ng)ė├ųą╚ĪĄ├┴╦ŅA(y©┤)Ų┌Ą─ą¦╣¹ĪŻ
3Ż«┐žųŲĘĮ░ĖĄ─īŹ(sh©¬)¼F(xi©żn)╝╝Ū╔
3.1 ÕüĀtųĖ┴Ņäė(d©░ng)æB(t©żi)Ęų┴┐Ą─▀ē▌ŗīŹ(sh©¬)¼F(xi©żn)
žō(f©┤)║╔įO(sh©©)Č©ųĄŲ½▓Ņė╔ÖC(j©®)ĮMžō(f©┤)║╔─┐ś╦(bi©Īo)ųĄ£p╚źīŹ(sh©¬)ļHžō(f©┤)║╔įO(sh©©)Č©ųĄ«a(ch©Żn)╔·Ż¼ÖC(j©®)ĮMžō(f©┤)║╔─┐ś╦(bi©Īo)ųĄĄ─Ė─ūā╩ŪļA▄SĄ─Ż¼Č°īŹ(sh©¬)ļHžō(f©┤)║╔įO(sh©©)Č©ųĄät╩▄ÖC(j©®)ĮMūāžō(f©┤)║╔╦┘┬╩Ą─Ž▐ųŲŻ¼╩Ūę╗éĆ(g©©)ŠÅūā┴┐ĪŻ«ö(d©Īng)ÖC(j©®)ĮMĮė╩▄AGCžō(f©┤)║╔ųĖ┴Ņį÷£pžō(f©┤)║╔Ģr(sh©¬)Ż¼žō(f©┤)║╔įO(sh©©)Č©ųĄŲ½▓Ņīó«a(ch©Żn)╔·ę╗éĆ(g©©)ļA▄SĄ─Ēææ¬(y©®ng)Ż¼▓óļSīŹ(sh©¬)ļHžō(f©┤)║╔įO(sh©©)Č©ųĄĄ─ä“╦┘ūā╗»Č°ä“╦┘£pąĪŻ¼Įø(j©®ng)║»öĄ(sh©┤)ĻP(gu©Īn)ŽĄ▐D(zhu©Żn)ōQ║¾Ż¼ūŅĮK«a(ch©Żn)╔·ÕüĀt╚╝┴Ž┴┐ųĖ┴Ņäė(d©░ng)æB(t©żi)Ęų┴┐Ą─Ū░ü─Żą═ĪŻ╚╝┴Ž┴┐Ą─ļA▄Sūā╗»Ž▐╦┘┬╩æ¬(y©®ng)Ą═ė┌ÖC(j©®)ĮMĄ─RB╦┘┬╩Ż¼▓óį┌▒ŻūCÖC(j©®)ĮMĖ„ĒŚ(xi©żng)ģóöĄ(sh©┤)š{(di©żo)╣Ø(ji©”)ŲĘ┘|(zh©¼)ØMūŃę¬Ū¾Ą─Ū░╠ߎ┬š¹Č©ĪŻ
łD3ųą╠ōŠĆ▓┐Ęų╩Ūßśī”(du©¼)žō(f©┤)║╔ųĖ┴ŅąĪĘ∙Ė─ūāĢr(sh©¬)Ż¼ŽĄĮy(t©»ng)š{(di©żo)╣Ø(ji©”)ų▄Ų┌Č╠Ż¼ģóöĄ(sh©┤)ęū│¼š{(di©żo)Č°╠ž╩ŌįO(sh©©)ėŗ(j©¼)Ą─Ż¼═¼Ģr(sh©¬)ę▓▒▄├Ō┴╦AGC▀B└m(x©┤)š{(di©żo)╣Ø(ji©”)▀^│╠ųą│÷¼F(xi©żn)▓╗▀B└m(x©┤)Ą─Ū░üųĖ┴ŅĪŻįōįO(sh©©)ėŗ(j©¼)═©▀^ę╗╠ū▀ē▌ŗėøæø╗ž┬Ęśŗ(g©░u)│╔į÷£pĘĮŽ“Ą─ūį▀mæ¬(y©®ng)ĖĪäė(d©░ng)ķTÖæųĄŻ¼īŹ(sh©¬)¼F(xi©żn)▓ó│õĘų┐╝æ]┴╦Ė„ėøæø³c(di©Żn)į┌╣żør░l(f©Ī)╔·╦▓ķgĖ─ūā╝░ųĖ┴Ņ▀B└m(x©┤)▀fūā╗“Ę┤▐D(zhu©Żn)Ģr(sh©¬)Ą─╝░Ģr(sh©¬)Å═(f©┤)Üw┼cųžų├╣”─▄ĪŻ
Ģr(sh©¬)ķg³c(di©Żn)t0╩ŪÖC(j©®)ĮMžō(f©┤)║╔ųĖ┴Ņūā╗»║¾Ą─īŹ(sh©¬)ļHžō(f©┤)║╔▀^┴Ń³c(di©Żn)Ż¼įō³c(di©Żn)╩Ū═©▀^┼ąöÓ─┐ś╦(bi©Īo)žō(f©┤)║╔┼cžō(f©┤)║╔įO(sh©©)Č©ųĄĪóžō(f©┤)║╔įO(sh©©)Č©ųĄ┼cīŹ(sh©¬)ļHžō(f©┤)║╔ųĄā╔ĮMŲ½▓Ņ╩Ūʱ═¼Ģr(sh©¬)═¼Ž“▀^┴Ń«a(ch©Żn)╔·Ą─ĪŻįō╣”─▄┐╔▒ŻūCÖC(j©®)ĮMžō(f©┤)║╔į┌═Ōö_╗“ģóöĄ(sh©┤)Ų½ļx╣żørŽ┬─▄╝░Ģr(sh©¬)ą▐š²║═▀^┴ŃĪŻžō(f©┤)║╔▀^┴Ń║¾Ż¼ÕüĀtųĖ┴Ņ═©▀^æTąį╦ź£pŻ¼ŲĮ║ŌĀtā╚(n©©i)─▄┴┐╣®ąĶŻ¼ęųųŲŲ¹ē║│¼š{(di©żo)Ż¼į┌š{(di©żo)ķTĄ─┼õ║ŽŽ┬╩╣ÖC(j©®)ĮM┐ņ╦┘ĘĆ(w©¦n)Č©ė┌─┐ś╦(bi©Īo)žō(f©┤)║╔³c(di©Żn)ĪŻ
3.2 ╗¼ē║Č╬š{(di©żo)ķT╗ž╬╗įO(sh©©)ėŗ(j©¼)┐sČ╠ÖC(j©®)ĮMĘĆ(w©¦n)Č©Ģr(sh©¬)ķg
ÖC(j©®)ĮM▀\(y©┤n)ąąį┌╗¼ē║Č╬║═Č©ē║Č╬ī”(du©¼)Ų¹ÖC(j©®)š{(di©żo)ķTĄ─äė(d©░ng)ū„ę¬Ū¾ėą╦∙▓╗═¼Ż¼Č©ē║▀\(y©┤n)ąąĢr(sh©¬)š{(di©żo)ķTķ_Č╚┼cÖC(j©®)ĮMžō(f©┤)║╔┤µį┌ŠĆąįĄ─ī”(du©¼)æ¬(y©®ng)ĻP(gu©Īn)ŽĄŻ¼Ė∙ō■(j©┤)įōī”(du©¼)æ¬(y©®ng)ĻP(gu©Īn)ŽĄ╝┤┐╔┤_Č©Ų¹ÖC(j©®)ų„┐žĄ─Ū░üŪ·ŠĆŻ╗Ą½ī”(du©¼)ė┌╗¼ē║▀\(y©┤n)ąąŻ¼Ė„žō(f©┤)║╔³c(di©Żn)Ą─ī”(du©¼)æ¬(y©®ng)š{(di©żo)ķTķ_Č╚╗∙▒Š▓╗ūāŻ¼▒žĒÜųžą┬š¹Č©įōČ╬Ą─║»öĄ(sh©┤)ĻP(gu©Īn)ŽĄŻ¼ęį╠ß╣®▀m«ö(d©Īng)?sh©┤)─Ū░üū(zh©żn)„ė├ĪŻ╣Pš▀▓╔ė├┴╦▒╚Č©ē║Č╬ą▒┬╩┬įąĪĄ─ī”(du©¼)æ¬(y©®ng)īŹ(sh©¬)ļHžō(f©┤)║╔įO(sh©©)Č©ųĄĄ─ŠĆąį║»öĄ(sh©┤)ū„×ķÖC(j©®)ĮM╗¼ē║Č╬Ą─Ū░üŪ·ŠĆŻ¼▒ŻūC┴╦žō(f©┤)║╔Ą─┐ņ╦┘│ų└m(x©┤)Ēææ¬(y©®ng)ĪŻĄ½╩ŪŻ¼╚¶š{(di©żo)ķTķ_Č╚Ų½ļx╗¼ē║▀\(y©┤n)ąąĄ─įO(sh©©)ėŗ(j©¼)ķ_Č╚║¾▓╗─▄╝░Ģr(sh©¬)╗ž╬╗Ż¼Š═Ģ■(hu©¼)įņ│╔ÖC(j©®)ĮMĮø(j©®ng)Ø·(j©¼)ąįĄ─Ž┬ĮĄČ°╩¦╚ź┴╦ÖC(j©®)ĮM╗¼ē║▀\(y©┤n)ąąĄ─ęŌ┴xĪŻęį╔²žō(f©┤)║╔×ķ└²Ż¼«ö(d©Īng)ÖC(j©®)ĮMžō(f©┤)║╔▀_(d©ó)ĄĮ─┐ś╦(bi©Īo)ųĄ║¾Ż¼ļSų°ų„Ų¹ē║Ą─╠ß╔²žō(f©┤)║╔īó▀M(j©¼n)ę╗▓Į│¼š{(di©żo)Ż¼┤╦Ģr(sh©¬)└¹ė├Ų¹ÖC(j©®)ų„┐žŪ░üą┼╠¢(h©żo)Ą─╗ž╬╗įO(sh©©)ėŗ(j©¼)Ż¼ę╗ĘĮ├µ┐╔ėąą¦ęųųŲžō(f©┤)║╔Ą─│¼š{(di©żo)Ż¼╠ßĖ▀┐žųŲŠ½Č╚Ż¼┴Ēę╗ĘĮ├µīóš{(di©żo)š¹ÕüĀtąŅ¤ßĀŅæB(t©żi)Ż¼į┌ÕüĀtųĖ┴Ņäė(d©░ng)æB(t©żi)│¼Ū░┴┐ųØuŽ¹═╦Ą─═¼Ģr(sh©¬)ŠS│ųų„Ų¹ē║┴”Ė·ļSŲ¹ē║įO(sh©©)Č©ųĄ─Żą═ŠÅ┬²╔Ž╔²ĪŻį┌ūāžō(f©┤)║╔▀^│╠ĮY(ji©”)╩°Ż¼žō(f©┤)║╔Ų¹ē║▀_(d©ó)ĄĮ─┐ś╦(bi©Īo)ųĄĢr(sh©¬)Ż¼Ų¹ÖC(j©®)š{(di©żo)ķTīó╗žÜwĄĮįO(sh©©)ėŗ(j©¼)Ą─Įø(j©®ng)Ø·(j©¼)ŲĮ║Ō³c(di©Żn)ĪŻįōįO(sh©©)ėŗ(j©¼)└¹ė├Ū░ü─Żą═Ą─Ū╔├Ņ╠Ä└Ē╝ė┐ņ┴╦ÕüĀtąŅ¤ßĀŅæB(t©żi)Ą─╗ųÅ═(f©┤)Ż¼┐sČ╠┴╦ÖC(j©®)ĮMĄ─ĘĆ(w©¦n)Č©Ģr(sh©¬)ķgŻ¼╩╣ÖC(j©®)ĮM▒M┐ņ▀M(j©¼n)╚ļĮø(j©®ng)Ø·(j©¼)▀\(y©┤n)ąąĀŅæB(t©żi)ĪŻ
įO(sh©©)ėŗ(j©¼)╦╝ŽļĄ─▀ē▌ŗīŹ(sh©¬)¼F(xi©żn)╚ńłD4┐“łD╦∙╩ŠŻ¼Ųõųą║»öĄ(sh©┤)F1(x)┤·▒Ē╚½▀^│╠Ų¹ÖC(j©®)š{(di©żo)ķTķ_Č╚┼cÖC(j©®)ĮMžō(f©┤)║╔Ą─īŹ(sh©¬)ļHī”(du©¼)æ¬(y©®ng)ĻP(gu©Īn)ŽĄŻ¼║»öĄ(sh©┤)F2(x)ät╩Ūžō(f©┤)║╔ūā╗»▀^│╠ųąīŹ(sh©¬)ļHū„ė├Ą─Ū░ü─Żą═Ż¼ė╔╔Ž╩÷Č©ē║Č╬┼c╗¼ē║Č╬Ą─Ū░üŪ·ŠĆĮM║ŽČ°│╔ĪŻ«ö(d©Īng)žō(f©┤)║╔įO(sh©©)Č©ųĄ░l(f©Ī)╔·Ė─ūāĢr(sh©¬)Ż¼ģóöĄ(sh©┤)įO(sh©©)ų├─ŻēKĪ░ADAPTĪ▒īóĘeĘųŲ„Ą─ĘeĘųÅŖ(qi©óng)Č╚ų├×ķ0Ż¼ätĘeĘųŲ„Ą─▌ö│÷ų▒ĮėüĒūįŲõŪ░üF2(x)Ą─▌ö│÷Ż¼Ų¹ÖC(j©®)ų„┐ž╝┤ęįįO(sh©©)ėŗ(j©¼)Ą─Ū░ü─Żą═ķ_╩╝äė(d©░ng)ū„Ż╗«ö(d©Īng)ÖC(j©®)ĮMžō(f©┤)║╔ĄĮ▀_(d©ó)─┐ś╦(bi©Īo)ųĄ║¾Ż¼ĘeĘųÅŖ(qi©óng)Č╚ŪąōQ×ķģóöĄ(sh©┤)AŻ¼ätŲ¹ÖC(j©®)ų„┐žĄ─Ū░üą┼╠¢(h©żo)īóį┌ĘeĘųŲ„ĘeĘųū„ė├Ž┬ŠÅ┬²╗žš{(di©żo)ų┴F1(x)╦∙įO(sh©©)ų├Ą─Įø(j©®ng)Ø·(j©¼)╣żū„³c(di©Żn)Ż¼ÖC(j©®)ĮM╗ųÅ═(f©┤)Įø(j©®ng)Ø·(j©¼)▀\(y©┤n)ąąĪŻ
3.3 Ų¹ē║Č©ųĄ─Żą═╦└ģ^(q©▒)Ą─ųŪ─▄┼ąöÓ
Ų¹ē║Č©ųĄ─Żą═Ą─╦└ģ^(q©▒)įO(sh©©)ų├▓╔ė├▀ē▌ŗ╗ž┬ĘųŪ─▄┼ąöÓ┤_Č©Ż¼▒▄├Ōžō(f©┤)║╔ūā╗»Ū░ÖC(j©®)ĮM│§╩╝ĀŅæB(t©żi)ī”(du©¼)ų„Ų¹ē║Ēææ¬(y©®ng)Ą─ė░ĒæĪŻĖ∙ō■(j©┤)Ų¹ÖC(j©®)ÅS╠ß╣®Ą─ÖC(j©®)ĮM╗¼ē║Ū·ŠĆįO(sh©©)Č©ÖC(j©®)ĮMŲ¹ē║─┐ś╦(bi©Īo)Č©ųĄŪ·ŠĆŻ¼«ö(d©Īng)ÖC(j©®)ĮMį┌╗¼ē║Č╬ūāžō(f©┤)║╔Ģr(sh©¬)Ż¼Ų¹ē║įO(sh©©)Č©ųĄīó▒Ż│ųįŁ╬╗Ż¼┤²▀ē▌ŗ╗ž┬Ę┼ąöÓ│÷īŹ(sh©¬)ļHų„Ų¹ē║┴”ęč«a(ch©Żn)╔·┼cžō(f©┤)║╔ūā╗»═¼Ž“Ą─Ēææ¬(y©®ng)║¾Ż©╚ńłD2╦∙╩ŠŻ®Ż¼į┘ęįČ■ļAæTąį▀tčė╦┘┬╩ųØuĮėĮ³žō(f©┤)║╔įO(sh©©)Č©ųĄ╦∙ī”(du©¼)æ¬(y©®ng)Ą─Ų¹ē║─┐ś╦(bi©Īo)Č©ųĄŻ¼═Ļ│╔ų„š¶Ų¹ē║┴”Ą─ĮŌ±Ņ┐žųŲ┼c£╩(zh©│n)┤_š{(di©żo)╣Ø(ji©”)ĪŻ
3.4 ╗∙ė┌ŽĄĮy(t©»ng)¶ö░¶ąį┐╝æ]Ą─įO(sh©©)ėŗ(j©¼)╝Ü(x©¼)╣Ø(ji©”)
1) Ų¹ē║Č©ųĄūā╗»Ą─ūį▀mæ¬(y©®ng)ąį
žō(f©┤)║╔ūā╗»▀^│╠ųąŻ¼ę“├║┘|(zh©¼)═╗ūāĪó═Č│Ęė═śī╗“ŪąōQ─ź├║ÖC(j©®)Ą╚ĘŪš²│ŻįŁę“?q©▒)¦ų┬Ų¹ē║Ų½ļxĢr(sh©¬)Ż¼Ų¹ē║įO(sh©©)Č©ųĄīóūįäė(d©░ng)▀M(j©¼n)ąąš{(di©żo)š¹Ż¼ęį┼õ║ŽīŹ(sh©¬)ļHŲ¹ē║Ą─┼╝╚╗ūā╗»Ż¼Ž¹│²«É│Żö_äė(d©░ng)ī”(du©¼)ŽĄĮy(t©»ng)ĘĆ(w©¦n)Č©įņ│╔Ą─žō(f©┤)├µė░ĒæĪŻ«ö(d©Īng)žō(f©┤)║╔ūā╗»ĘĮŽ“ųą═ŠĖ─ūāĢr(sh©¬)Ż¼ų„Ų¹ē║Č©ųĄ╝░īŹ(sh©¬)ļHųĄūā╗»Ą─▀tŠÅätŪĪ║├┐sąĪ┴╦Ųõ╚½▀^│╠ųąĄ─īŹ(sh©¬)ļHūā╗»Ę∙Č╚Ż¼«ö(d©Īng)AGCųĖ┴Ņį┌─│ę╗ģ^(q©▒)ė“ā╚(n©©i)╔ŽŽ┬ŅlĘ▒äė(d©░ng)ū„Ģr(sh©¬)Ż¼┐╔╩╣ų„Ų¹ē║╗∙▒Š▒Ż│ų║ŃČ©Ż¼▀@ī”(du©¼)ė┌É║┴ė╣żørŽ┬│õĘų░l(f©Ī)ō]ÕüĀtąŅ─▄Ż¼ŠS│ųÖC(j©®)ĮMĖ„ĒŚ(xi©żng)ģóöĄ(sh©┤)ĘĆ(w©¦n)Č©ėąų°├„’@Ą─īŹ(sh©¬)ė├ār(ji©ż)ųĄĪŻ
2) Įø(j©®ng)Ø·(j©¼)╣żū„³c(di©Żn)Ą─ūį▀mæ¬(y©®ng)ą▐š²
ģf(xi©”)š{(di©żo)┐žųŲĘĮ╩ĮŽ┬Ż¼žō(f©┤)║╔┐žųŲ╗ž┬Ę╩Ū┐ņ╦┘╗ž┬ĘŻ¼Č°Ų¹ē║┐žųŲ╗ž┬ĘĒææ¬(y©®ng)ät┬²įSČÓĪŻį┌▀\(y©┤n)ąą▀^│╠ųąŻ¼ÖC(j©®)ĮMė╔ė┌Ė„ĘN┼╝░l(f©Ī)ę“╦ž┐╔─▄ī¦(d©Żo)ų┬žō(f©┤)║╔┼cŲ¹ē║Ų½ļxįO(sh©©)Č©ųĄŻ¼┤╦Ģr(sh©¬)Ż¼Ų¹ÖC(j©®)ų„┐žĄ─š{(di©żo)╣Ø(ji©”)ū„ė├īó╩╣ÖC(j©®)ĮMžō(f©┤)║╔Č╠Ģr(sh©¬)ķg╗ųÅ═(f©┤)Ż¼Ą½ė╔ė┌ÕüĀtŲ¹ē║Ēææ¬(y©®ng)Ą─£■║¾Ż¼š{(di©żo)ķTĄ─äė(d©░ng)ū„īó╩╣ų„Ų¹ē║░l(f©Ī)╔·▒│ļxŻ¼ÖC(j©®)ĮMŲ½ļxĮø(j©®ng)Ø·(j©¼)╣żū„³c(di©Żn)Ż¼╚¶āH└¹ė├ÕüĀt┼cŲ¹ÖC(j©®)ų„┐žĄ─│ŻęÄ(gu©®)š{(di©żo)╣Ø(ji©”)ū„ė├Ż¼╩╣ÖC(j©®)ĮMųžą┬╗žÅ═(f©┤)ų┴š²│Ż╣żū„³c(di©Żn)īóąĶę¬öĄ(sh©┤)éĆ(g©©)ų▄Ų┌Ą─üĒ╗žš{(di©żo)╣Ø(ji©”)Ż¼╔§ų┴┐╔─▄ę²ŲŽĄĮy(t©»ng)ĘĆ(w©¦n)Č©ąįŽ┬ĮĄęįų┴ģóöĄ(sh©┤)š±╩ÄĪŻ└¹ė├PID─ŻēKĄ─ķ]µi╣”─▄Ż¼┐╔ī”(du©¼)╣żū„³c(di©Żn)▀M(j©¼n)ąąūį▀mæ¬(y©®ng)š{(di©żo)š¹Ż¼┐sČ╠ÖC(j©®)ĮMĘĆ(w©¦n)Č©Ģr(sh©¬)ķgŻ¼╠ßĖ▀ŽĄĮy(t©»ng)¶ö░¶ąįĪŻ
įć“×(y©żn)ųą░l(f©Ī)¼F(xi©żn)Ż¼PIDķ]µi╣”─▄▓╗āHŠ▀ėąķ]µi─▄┴”Ż¼▀ĆėąĘ┤Ž“š{(di©żo)╣Ø(ji©”)─▄┴”Ż¼į┌ų„Ų¹ē║░l(f©Ī)╔·▌^┤¾Ų½ļxĢr(sh©¬)Ż¼ī”(du©¼)ÖC(j©®)ĀtĄ─PID┐žųŲŲ„ū„å╬ĘĮŽ“ķ]µiŻ¼ķ]µi▓╗└¹ĘĮŽ“Ī¬Ī¬žō(f©┤)║╔š{(di©żo)╣Ø(ji©”)Ęų┴┐Ż¼ßīĘ┼ėą└¹ĘĮŽ“Ī¬Ī¬Ų¹ē║š{(di©żo)╣Ø(ji©”)Ęų┴┐Ż¼PID┐žųŲŲ„īóĖ∙ō■(j©┤)▓╗═¼Ą─Ų½▓Ņ┴┐ū÷│÷▓╗═¼ÅŖ(qi©óng)Č╚Ą─ėą└¹Ų¹ē║š{(di©żo)╣Ø(ji©”)ĘĮŽ“Ą─ų·═Ų╩Įš{(di©żo)š¹Ż¼ę╗ĘĮ├µ═©▀^š{(di©żo)ķTäė(d©░ng)ū„╩╣Ų¹ē║▌^┐ņ╗žÜwŻ¼┴Ēę╗ĘĮ├µī”(du©¼)ÕüĀtųĖ┴Ņū÷│÷╬óš{(di©żo)Ż¼╩╣ŲõĖ³┐ņĄĮ▀_(d©ó)ą┬Ą─╣żū„³c(di©Żn)Ż¼ÖC(j©®)Ātį┌Įø(j©®ng)Ø·(j©¼)╣żū„³c(di©Żn)ĖĮĮ³▀_(d©ó)│╔ą┬Ą─ŲĮ║ŌĪŻ
4Ż«─Żą═ā×(y©Łu)╗»╝╝ąg(sh©┤)Ą─æ¬(y©®ng)ė├īŹ(sh©¬)ą¦┼cŪ░Š░
─Żą═ā×(y©Łu)╗»┐žųŲĘĮ░Ėį┌šŃĮŁ▒▒ü÷Ė█ļŖÅSČ■Ų┌╚²┼_(t©ói)600MWÖC(j©®)ĮM╝░£žų▌░l(f©Ī)ļŖÅSā╔┼_(t©ói)300MWÖC(j©®)ĮM╔ŽŠ∙Ą├ĄĮ┴╦│╔╣”æ¬(y©®ng)ė├Ż¼īŹ(sh©¬)╩®įōĘĮ░ĖĄ─ÖC(j©®)ĮMžō(f©┤)║╔Ēææ¬(y©®ng)Ģr(sh©¬)ķgė╔│ŻęÄ(gu©®)┐žųŲĘĮ╩ĮŽ┬Ą─1~2ĘųńŖ╠ßĖ▀ĄĮ┴╦20~40├ļŻ¼╚½▀^│╠īŹ(sh©¬)ļHŲĮŠ∙ūāžō(f©┤)║╔┬╩▀_(d©ó)ĄĮ┴╦2%/minĪó3%/minęįų┴5%/minįć“×(y©żn)Ą─╦┘┬╩ę¬Ū¾Ż¼ÖC(j©®)ĮMĖ„ĒŚ(xi©żng)ģóöĄ(sh©┤)Ą─š{(di©żo)╣Ø(ji©”)ŲĘ┘|(zh©¼)ę▓Š∙ėą╦∙ā×(y©Łu)╗»Ż¼Č°ŪęīŹ(sh©¬)¼F(xi©żn)┴╦ÖC(j©®)ĮM╚½│╠╗¼ē║▀\(y©┤n)ąąĄ─Įø(j©®ng)Ø·(j©¼)ąį─┐ś╦(bi©Īo)ĪŻAGCĘĮ╩Į═Č╚ļĢr(sh©¬)Ż¼ÖC(j©®)ĮMžō(f©┤)║╔Ą─ļSäė(d©░ng)ąį║▄║├Ż¼─▄═Ļ╚½Ė·ļSAGCųĖ┴ŅĄ─ūā╗»Ż¼ų„š¶Ų¹ē║┴”ŲĮĘĆ(w©¦n)╩▄┐žŻ¼ÖC(j©®)ĮMĖ„ĒŚ(xi©żng)ģóöĄ(sh©┤)Š∙š{(di©żo)╣Ø(ji©”)ĘĆ(w©¦n)Č©ĪŻĮø(j©®ng)▀^ę╗Č╬Ģr(sh©¬)Ų┌Ą─▀\(y©┤n)ąąīŹ(sh©¬)█`ūC├„Ż¼įōā×(y©Łu)╗»┐žųŲ╝╝ąg(sh©┤)▀_(d©ó)ĄĮ┴╦ŅA(y©┤)Ų┌Ą─įO(sh©©)ėŗ(j©¼)─┐ś╦(bi©Īo)Ż¼╩╣ÖC(j©®)ĮMį┌AGCĘĮ╩ĮŽ┬┤µį┌Ą─ų„ę¬å¢Ņ}Ą├ĄĮ┴╦ėąą¦ĮŌøQĪŻ
ą┬ĘĮ░Ėųą▓╔ė├Ą─╗¼ē║┐žųŲ╝╝ąg(sh©┤)└¹ė├ÖC(j©®)ĮMĄ─įO(sh©©)ėŗ(j©¼)Įø(j©®ng)Ø·(j©¼)╗¼ē║Ū·ŠĆ╝░Ų¹ÖC(j©®)š{(di©żo)ķTūįäė(d©░ng)╗ž╬╗╝╝ąg(sh©┤)╩╣ÖC(j©®)ĮMį┌Ė„ĘN╣żørŽ┬Ą─▀\(y©┤n)ąąĮø(j©®ng)Ø·(j©¼)ąįĄ├ĄĮ┴╦▒ŻšŽŻ¼▀@īó×ķļŖÅSĦüĒų▒ĮėĄ─Įø(j©®ng)Ø·(j©¼)ą¦ęµŻ¼╝ėų«įōĒŚ(xi©żng)╝╝ąg(sh©┤)ī”(du©¼)ļŖ─▄ŲĘ┘|(zh©¼)╝░ļŖŠW(w©Żng)š{(di©żo)Č╚ĘĮ├µū÷│÷Ą─žĢ½I(xi©żn)Ż¼į┌Į±║¾Ą─═ŲÅVīŹ(sh©¬)█`ųąę╗Č©Ģ■(hu©¼)ėąÅVķ¤Ą─Ū░Š░ĪŻ
5Ż«ĮY(ji©”)╩°šZ
AGC╝╝ąg(sh©┤)▀Ćīó▓╗öÓ░l(f©Ī)š╣Ż¼ą┬ęÄ(gu©®)ätĄ─╠ß│÷║═ą┬å¢Ņ}Ą─▒®┬ČČ╝īó╩Ū┐žųŲ╝╝ąg(sh©┤)Ė─▀M(j©¼n)┼cĖ³ą┬Ą─äė(d©░ng)┴”Ż¼ßśī”(du©¼)▓╗═¼Ą─¼F(xi©żn)ł÷(ch©Żng)ąĶŪ¾Ż¼╣Pš▀▀Ćīó▓╗öÓĄž▀M(j©¼n)ąą╠Į╦„║══Ļ╔ŲĪŻ
ģó┐╝╬─½I(xi©żn)Ż║
[1] ═§ĒĄµ─. ╗ļŖÖC(j©®)ĮMģf(xi©”)š{(di©żo)┐žųŲī”(du©¼)AGCĄ─▀mæ¬(y©®ng)ąįĘų╬÷. ųąć°(gu©«)ļŖ┴”Ż¼1999Ż¼Ż©6Ż®





