ЦЬЦӘ әОјС цДЭxСу ьS»Н УаЧУГч Нх№вҪЎ
(іЙ¶јИAһйјјРgУРПЮ№«Лҫ,іЙ¶ј 610000)
0 ТэСФ
ГжПт2030 Дкј°ОҙҒн,ИЛоҗЙз•юҢўЯMИлЦЗДЬ»Ҝ•rҙъ,”өЧЦКАҪзЕcОпАнКАҪзҢўҹoҝpИЪәП,лSЦшФцҸҠ¬FҢҚЎўМ“”M¬FҢҚЎў»мәП¬FҢҚөИіБҪюКҪГҪуw‘ӘУГөДІ»”аУҝ¬FәНХӯҺ§ОпВ“ҫWЎўРРҳIОпВ“ҫWәНЬҮөҪИfОп(Vehicle to Everything,V2X)өДҳЛңК»Ҝ,ТЖ„УҫWҪjЯBҪУөДЦШьcТСҪӣУЙИЛЮDТЖөҪОпЎЈөҪ6G •rЖЪ,ҢўЯMТ»ІҪСЭЯMөҪЯBҪУЦЗДЬЎЈҝЙіЦАm°lХ№ҢўтҢ„УТЖ„УНЁРЕјјРgіЦАmҸД5G Пт6GөьҙъЙэјүЎЈОҙҒн,6G Ңўй_Ҷў»ҘВ“ЦЗДЬөДРВ•rҙъ,ТФ‘ӘҢҰИЛоҗәНЙз•юФЪФS¶а·ҪГжөДМф‘рЎЈҫWҪjІ»ФЩКЗҶОТ»№ҰДЬөДНЁРЕҫWҪj,¶шҢўМṩёРЦӘЎўНЁРЕЎўУӢЛгөДДЬБҰәН”ө“ю·ю„Х,ИЪәПОпАнЎўҫWҪjәНЙъОпКАҪз,ХжХэУӯҒнИfОпёРЦӘЎўЯBҪУәНЦЗДЬөД•rҙъ[1]ЎЈ
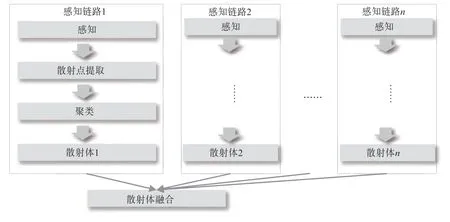
ҹoҫҖёРЦӘ(°ьАЁ¶ЁО»ЎўЯ\„УҷzңyәНіЙПс)йLЖЪТФҒнТ»ЦұКЗЕcТЖ„УПөҪyІўРРй_°lөДТ»н—ҶОӘҡјјРg,ҹoҫҖёРЦӘөДөдРН‘ӘУГИзҲD1 ЛщКҫ,ТФНщөДУРФҙ¶ЁО»ДҝҳЛЦчТӘКЗДЬ°lЙдлҠҙЕІЁөДҪK¶Л,ИзКЦҷCЎўЬҮЭvЎўОпВ“ҫWФOӮдөИЎЈФЪ6G ЦР,НЁРЕёРЦӘТ»уw»Ҝ(Integrated Sensing and Communication,ISAC)·ю„ХҫЯУРОпАнӯhҫіөДҷzңyДЬБҰ,°ьә¬Цч„УәНұ»„УДҝҳЛ,ЯMТ»ІҪ°ьАЁҹoФҙОпуw,ИзҪЁЦюОпЎўіЗКРФOК©(ҸVёжЕЖЎўҳтБәөИ)ЎўҪ»НЁЗйӣr(ЬҮЭvЎўЧФРРЬҮЎўИЛөИ)өИЎЈНЁРЕёРЦӘТ»уw»ҜНЁЯ^ҪУКХлҠҙЕІЁРЕМ–(ҪӣҝХйgӯhҫіӮчІҘ)ЗуҪвҝХйgӯhҫіөДҳӢіЙ,НЁЯ^М“”Mӯhҫі(УРФҙЎўҹoФҙОпуwәНФOӮд)өДМҪңyЕcЦШҳӢ,ёРЦӘ«@ИЎЦЬҮъОпАнӯhҫіөДРЕПў,РОіЙМ“”MөД”өЧЦКАҪз,УРЦъУЪМҪЛчНЁРЕДЬБҰ,МбЙэУГ‘фуwтһ[2-4]ЎЈ

ҲD1 ҹoҫҖёРЦӘөДөдРН‘ӘУГ
ҫWҪjёРЦӘУРНыФЪ6G ЦРҢҚ¬FЯBҪУЦЗДЬЎЈН¬•r,АыУГҸДёРЦӘЦР«@ИЎөДӯhҫіРЕПў,ТФЭoЦъНЁРЕ«@өГёьёЯөДоlЧVР§ВК,»тХЯёьҪЎүСЎўҫЯУРҸ—РФј°ТЧУЪ»ЦҸНөДҫWҪj,КЗёРЦӘЭoЦъНЁРЕөДЦчТӘХnо}ЎЈһйБЛід·Ц°l“]НЁРЕҫWҪjФЪёРЦӘҳI„ХЦРөДЧчУГ,ұҫОДЯMТ»ІҪМбіцБЛ¶а№қьc¶а‘BёРЦӘҒнМбёЯёРЦӘРФДЬ,ІўУ‘Х“БЛНЁРЕёРЦӘТ»уw»ҜПөҪyФOУӢЦРөДкPжIМф‘рәНК№ДЬјјРg,ЦШьcУ‘Х“ЖдЦРөДҝХҝЪІЁРОФOУӢңК„tәН¶аХҫ¶а‘BЦШҳӢјјРg,ЧоәуФ”јҡҪйҪBБЛISAC өД‘ӘУГКҫАэ,УГ»щУЪКТНвҲцҫ°өД10 GHz ¶аХҫӯhҫіЦШҳӢј°ЭoЦъРЕөАЦШҪЁөДңyФҮҪY№ы,ТФЧCГчЖдҝЙРРРФЎЈ
1 НЁРЕёРЦӘТ»уw»ҜөДкPжIМф‘рЕcК№ДЬјјРg
лSҷCРЕөАҪЁДЈ·Ҫ·ЁУЙУЪУӢЛгҸНлs¶ИөНЎўТЧУЪҳЛңК»Ҝ,ЦчҢ§БЛҹoҫҖНЁРЕөДФu№А,ІўФЪ3GPP-SCMЎўWINNER I/IIЎўCOST 2100 әНMESTIS өИ¶аӮҖн—ДҝәНҳЛңКЦРК№УГ[5],ЧгТФУГУЪФu№АНЁРЕРФДЬЎЈИ»¶шФЪНЁРЕёРЦӘТ»уw»ҜЦР,НЁРЕәНёРЦӘҳI„Х¶јРиТӘҝј‘]РЕөАДЈРНЎЈУЙУЪёРЦӘ‘ӘУГөД¶аҳУРФ,ҪyУӢРЕөАДЈРНҹo·ЁқMЧгІ»Н¬‘ӘУГөД¶аҳУ»ҜТӘЗу,УИЖдКЗФЪҙ_¶ЁРФҲцҫ°өДФu№АЦР,ӮчҪyөДРЕөАҪЁДЈ·Ҫ·ЁРиТӘЦШРВЛјҝјәН„“РВЎЈ¶шФЪISACПөҪyөДФOУӢЦР,»щҺ§әНЙдоlУІјю№ІПнКЗСРҫҝөДЦШьcЎЈУІјюјҜіЙҪвӣQ·Ҫ°ёҪөөНБЛПөҪyЦ®йgөДХыуw№ҰәДЎўПөҪyҙуРЎәНРЕПўҪ»“QСУЯt;НЁРЕёРЦӘТ»уw»ҜҪвӣQ·Ҫ°ёңpЙЩБЛ•rйgЎўоlВКЎўҝХйgәНҙъҙaЩYФҙөИй_дN;УІјюТ»уw»ҜІЯВФҙЩЯMБЛёРЦӘәННЁРЕФЪК§ХжРЈңКәНСaғ”ЦРөД»ҘАы№ҰДЬЎЈұҫОДЦШьcУ‘Х“ЖдЦРөДISAC В“әПІЁРОЕcРЕМ–ФOУӢЎўҫWҪjЕcПөҪyФOУӢөИЎЈ
1.1 ISAC В“әПІЁРОЕcРЕМ–ФOУӢ
ISAC өДҝХҝЪФOУӢ‘ӘұMҝЙДЬҝј‘]ҸНУГҢ§оlәНРтБРФOУӢТФ№қјsй_дNЎЈЖдЦР,НЁРЕөДҢ§оlФOУӢНЁіЈбҳҢҰЭ^ёЯөДРЕФлұИЛ®ЖҪЎЈИ»¶ш,УЙУЪЙўЙдуwөДҙуРЎКЬПЮ,ЙўЙдуw·ҙЙдРЕМ–РЕФлұИНщНщО»УЪЭ^өНЛ®ЖҪ,ёРЦӘҷzңyРиТӘ·eАЫПаёЙРЕМ–ТФҙ_ұЈЭ^өНРЕФлұИПВөДёРЦӘРФДЬ,Я@К№өГПөҪyҢҰІЙҳУ¶¶„УЎўоlЖ«әНПаО»ФлВ•ёьГфёРЎЈ·ҙЦ®ҢҰПөҪyөДН¬ІҪРФәН·Җ¶ЁРФМбіцБЛёьёЯөДТӘЗуЎЈФЪЯx“сISAC ІЁРОЎўёРЦӘЛг·ЁәН“pӮыСaғ”·Ҫ°ё•rРиТӘҝј‘]Я@Р©Мф‘рЎЈ
ёРЦӘЕcНЁРЕВ“әПФOУӢөД№ӨЧчҙу¶ајҜЦРФЪВ“әПІЁРОФOУӢЙП[6-7]ЎЈСӯӯhЗ°ҫYХэҪ»оl·ЦҸНУГ(Cyclic Prefix Orthogonal Frequency Division Multiplexing,CP-OFDM)ТСұ»ЧCГчКЗНЁРЕөДУРАыЯx“с,ФS¶аСРҫҝИЛҶTТІҝј‘]ҢўҙЛ·NІЁРОУГУЪёРЦӘ,ө«Жд·еЦөЖҪҫщ№ҰВКұИ(Peak to Average Power Ratio,PAPR)Э^ёЯКЗТ»ӮҖЦШТӘҶ–о}ЎЈУИЖдКЗФЪлpХҫёРЦӘҲцҫ°ПВ,Н¬ІҪЎўПаФлөИ·ЗАнПлТтЛШ•юҢҰOFDM ёРЦӘФміЙУ°н‘ЎЈХ{оlЯBАmІЁ(Frequency Modulated Continuous Wave,FMCW)НЁіЈУГУЪАЧЯ_ПөҪy,ө«ІўІ»ЯmУГУЪҙ_ұЈНЁРЕ·ю„ХЛщРиөДЛЩВКҒнӮчЭ””ө“ю,Іҝ·ЦСРҫҝИЛҶTҪЁЧhёДЯMFMCW ІЁРО[8-9],К№ЖдёьЯmУГУЪНЁРЕПөҪyЎЈНЁРЕёРЦӘТ»уw»ҜІЁРОФOУӢРиТӘјжоҷНЁРЕәНёРЦӘөДРиЗу,ҫЯуwҝЙ·ЦһйНЁРЕәНёРЦӘ№ІН¬өДкPжIРиЗуЎўНЁРЕһйЦчөДкPжIРиЗуЎўёРЦӘһйЦчөДкPжIРиЗуЎЈЖдЦР,НЁРЕәНёРЦӘ№ІН¬өДкPжIРиЗуұн¬FһйТФПВҺЧ·ҪГжЎЈ
PAPRЎЈНЁЯ^ҪyУӢЛІ•rРЕМ–№ҰВКПаҢҰУЪЖҪҫщ№ҰВКөДёЕВК·ЦІјҒнГиКцҙэ°lЛНІЁРОЖр·ьЧғ»ҜөДіМ¶ИЎЈФЪҶОЭdІЁПөҪyЦР,PAPR ЦчТӘИЎӣQУЪХ{ЦЖ·ҪКҪәНіЙРНһVІЁЖч;ҢҰУЪ¶аЭdІЁПөҪy,УЙУЪ¶аВ·ЧУЭdІЁРЕМ–өДҜBјУ,PAPR ЦчТӘИЎӣQУЪҜBјУРЕМ–өД”өДҝ,УЙУЪ¶аЭdІЁ”өДҝНщНщЭ^ҙу,ТтҙЛ¶аЭdІЁПөҪyөДPAPR Ҷ–о}ПаҢҰҶОЭdІЁПөҪyёьјУҮАЦШЎЈЭ^ҙуөДPAPR ҢўК№өГ№ҰВК·ЕҙуЖчФЪёЯ№ҰВКЭ”іц•rөД·ЗҫҖРФМШРФп@ЦшФцјУ,јУ„ЎҺ§ғИ·ЗҫҖРФК§Хж,ІўҺ§ҒнҮАЦШөДҺ§НвоlЧVР№В¶Ҷ–о},ЯM¶шҗә»ҜҪУКХҷCөДХ`ҙaВК»тёРЦӘҫ«¶ИЎЈPAPR ҢҰ°lЛН№ҰВКөДУ°н‘уw¬FФЪёРЦӘҫалxәНёРЦӘДҝҳЛөДёРЦӘЛўРВВК(Update Rate)өИРФДЬЙПЎЈАэИз,ГжҢҰАЧЯ_ЙўЙдҪШГж(Radar Cross Section,RCS)Э^РЎөДДҝҳЛ,®”°lЛН№ҰВКҪөөН,НЁіЈҝЙТФ·eАЫёьйLөД•rйgТФ«@өГөИР§ёРЦӘРФДЬ,ө«ёРЦӘ”ө“юөДЛўРВВК•юҪөөНЎЈТтҙЛФЪЯhҫаЎўРЎДҝҳЛәНёЯЛўРВВКөДёРЦӘҳI„ХЦР,PAPR п@өГУИһйЦШТӘЎЈ
Һ§НвР№В¶ЎЈІЁРОұҫЙнұШнҡҝШЦЖҺ§НвР№В¶,ұЈЧCҢҰПааҸРЕөАөДёЙ”_әНУ°н‘·ыәПТӘЗуЎЈНЁРЕІЁРОбҳҢҰҺ§НвР№В¶УРұҠ¶аСРҫҝ,АэИз5G NR(јҙ»щУЪOFDM өДИ«РВҝХҝЪФOУӢөДИ«ЗтРФ5G ҳЛңК)Ц§іЦөДF-OFDM ·Ҫ°ёЎЈISAC ІЁРОФOУӢҝЙТФА^АmСШУГЦ®З°өДНЁРЕІЁРОФOУӢЎЈ
ҸНлs¶ИәН№ҰәДЎЈөН№ҰәДКЗ6G өДкPжIјјРgЦёҳЛ,НЁёРТ»уw»ҜІЁРОФOУӢРиТӘҷаәвҸНлs¶ИәНРФДЬЎЈбҳҢҰІ»Н¬өДҲцҫ°,ҸНлs¶ИәНРФДЬҫЯУРІ»Н¬өДҷаЦШЎЈ
оlЧVм`»оРФЎЈІ»Н¬өД‘ӘУГҲцҫ°әНІ»Н¬Хюё®ҢҰоlВКөД·ЦЕдҝЙДЬҢ§ЦВІ»Н¬өД№ӨЧчҺ§Ң’,ТтҙЛ,ФЪФOУӢ•rТӘҝј‘]оlЧVөДм`»оРФЎЈ
¶аЯM¶аіц(Multiple Input Multiple Output,MIMO)Ўў¶а№қьc…fЧчјжИЭРФЎЈMIMOЎў¶а№қьc…fЧчКЗМбЙэоlЧVР§ВКәНёРЦӘҫ«¶ИөДУРР§КЦ¶О,ТтҙЛ,НЁёРТ»уw»ҜІЁРОФOУӢұШнҡјжИЭMIMO әН¶а№қьc…fЧчЎЈ
НЁРЕһйЦчөДкPжIРиЗуЦчТӘуw¬FФЪоlЧVР§ВКәНЖдЛьЦёҳЛЙПЎЈ
оlЧVР§ВКЎЈоlЧVР§ВККЗНЁРЕЧокPЧўөДЦёҳЛ,ёРЦӘҢҰНЁРЕоlЧVР§ВКөДУ°н‘ЦчТӘуw¬FФЪғЙӮҖ·ҪГжЎЈөЪТ»,ёРЦӘРФДЬөДМбЙэРиТӘҢҰРЕМ–ЯMРРғһ»Ҝ,¶шНЁРЕ”ө“юКЗлSҷCөД,Я@ғЙХЯұҫЙнҫНКЗГ¬¶ЬөДЎЈөЪ¶ю,ёРЦӘРЕМ–ЕcНЁРЕРЕМ–ФЪ•rоlҝХЩYФҙЙПөДҸНУГТІРиТӘЦШьcҝј‘]ЎЈҲD2·Ц„eіК¬FБЛоl·ЦәН•r·ЦҷCЦЖПВ,НЁРЕәНёРЦӘРЕМ–өД·ЦІјЎЈҙЛНв,һйБЛұЈЧCНЁРЕжңВ·өДӮчЭ”Р§ВК,¬FУРНЁРЕҺ¬ғИөД…ўҝјРЕМ–ҝЙТФҸНУГУЪёРЦӘЎЈ
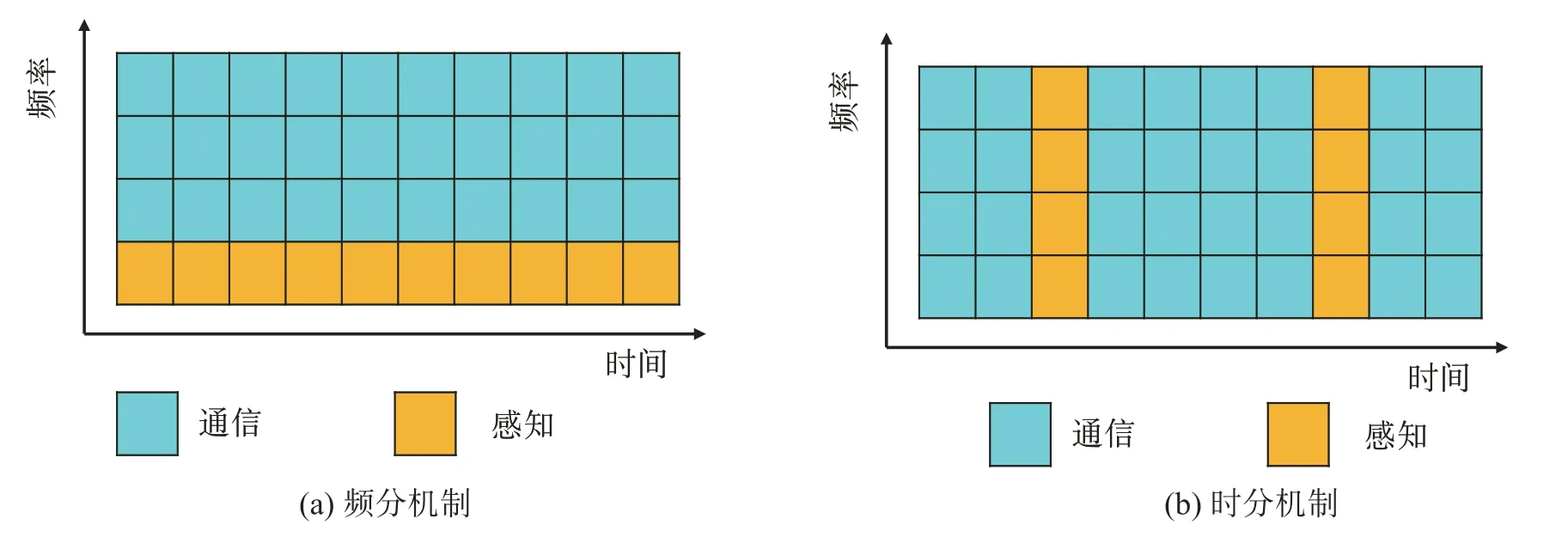
ҲD2 НЁРЕёРЦӘТ»уw»ҜФЪоl·ЦәН•r·ЦҷCЦЖПВөДоlВК·ЦІј
ЖдЛьЦёҳЛЎЈЖдЛьәН‘ӘУГҲцҫ°ҸҠПакPөДЦёҳЛ,АэИзі¬ёЯҝЙҝҝөН•rСУНЁРЕҲцҫ°РиТӘёЯҝЙҝҝЎўөНСУ•rөДНЁРЕІЁРОЎЈ
ёРЦӘһйЦчөДкPжIРиЗуЦчТӘуw¬FФЪ:
·ЦұжВКЎЈ·ЦұжВККЗЦёҢҰДҝҳЛөД·ЦұжДЬБҰ,НЁіЈуw¬FФЪҢҰҫалxЎўЛЩ¶ИәНҪЗ¶ИөД·ЦұжЙПЎЈҫЯуwҝЙ·Цһйҫалx·ЦұжВКЎўЛЩ¶И·ЦұжВКәНҪЗ¶И·ЦұжВКЎЈҫалx·ЦұжВКУГУЪұнХчёРЦӘФЪҫалxЙП…^·ЦаҸҪьДҝҳЛөДДЬБҰ,НЁіЈТФЧоРЎҝЙ·Цұжҫалx¶ИБҝ;ЛЩ¶И·ЦұжВКУГУЪұнХчёРЦӘФЪҸҪПтЛЩ¶ИЙП…^·ЦДҝҳЛөДДЬБҰ;ҪЗ¶И·ЦұжВКУГУЪұнХчАЧЯ_ФЪҪЗ¶ИЙП…^·ЦаҸҪьДҝҳЛөДДЬБҰ,НЁіЈТФЧоРЎҝЙ·ЦұжөДҪЗ¶ИйgёфҒнңyБҝЎЈЙПКцЦёҳЛұнКҫБЛГ}ӣ_АЧЯ_ҶОТ»ҫS¶ИөД·ЦұжДЬБҰЙППЮ,¶шФЪҢҚлHПөҪyФOУӢЦР,УЙУЪЧУЭdІЁЎўҝмЛЩёөАпИ~Чғ“Q(Fast Fourier Transform,FFT)ЎўһVІЁЖчФOУӢөИТтЛШ,І»Н¬ІЁРОәН…ў”өЕcАнХ“ЙППЮҙжФЪІоҫаЎЈҢҰУЪ¶аҫS¶И»т…ў”ө·Цұж(В“әП·Цұж)ҒнХf,АэИзЎ°ҫалxЎӘЛЩ¶ИЎұВ“әП·Цұж,ЗйӣrёьјУҸНлsЎЈҙЛНв,ёРЦӘөДҢҚлH·ЦұжДЬБҰЯҖКЬөҪЖдЛыТтЛШөДПЮЦЖ,АэИз®”ДҝҳЛөДЕRҪьЙўЙдДЬБҰПаІоәЬҙу•r,ҸҠДҝҳЛөДЕФ°к•юСЪЙwИхДҝҳЛ,Ң§ЦВ·ЦұжДЬБҰКЬөҪУ°н‘ЎЈ
ёРЦӘҫ«¶ИЎЈёРЦӘҫ«¶ИКЗЦёФЪҫалxЎўЛЩ¶ИЎўҪЗ¶ИөИҫS¶ИөДёРңyЦөЕcҢҚлHЦөЦ®йgөДІо®җЎЈФЪПөҪyҪo¶ЁҺ§Ң’ЎўАЫУӢУ^ңy•rйgЎўМмҫҖҝЪҸҪіЯҙзөИ…ў”өПВ,ёчӮҖҫS¶ИөДёРЦӘ·ЦұжВКұгТСҙ_Бў,ИзҪo¶ЁҺ§Ң’ПВ,ҫалxёРЦӘөДҫ«¶ИҢўКЬПЮУЪҫалx·ЦұжВКЎЈТтҙЛ,МбЙэёРЦӘҫ«¶ИөДұҫЩ|КЗНЁЯ^РЕМ–ФOУӢЎўЛг·ЁәНТЦЦЖ·ЗАнПлТтЛШ,ҒнК№өГёРЦӘҫ«¶ИФЪУРПЮөДРЕФлұИ…^йgғИұЖҪьЧоҙуРФДЬЎЈМбЙэёРЦӘҫ«¶ИөДіЈТҠ·Ҫ·ЁҝЙ·Цһй:ТФ¶аЦШРЕМ–·Цоҗ(Multiple Signal Classification,MUSIC)ЎўSAGEЎўOff-Grid өИі¬·ЦұжЛг·Ёһйҙъұн,НЁЯ^·ЗҫҖРФөьҙъөД·ҪКҪМбЙэёРЦӘҫ«¶И;ТФ2D-FFTЎў2D-correlation өИҫҖРФЛг·Ёһйҙъұн,ТФөНҸНлs¶ИһйҢ§Пт,ҢҚ¬FДҝҳЛөДҝмЛЩёъЫҷЎЈТФЧоҙуЛЖИ»№АУӢһйАэ,ҺЧ·NІЁРОөДөдРНХ`ІоҝЛАӯГАБ_Ҫз(Cramer-Rao Bound,CRB)ұнХчБЛФЪҶОДҝҳЛПВёРЦӘөДҫ«¶ИАнХ“ЙПҪзЎЈ¶аДҝҳЛ·ВХжФu№АёьЯmУГУЪҢҚлHөДҫЯуwёРЦӘҫ«¶И,ИзНЁРЕІЁРОФu№АРиТӘК№УГјҜИәСУ•rҫҖ/ійо^СУ•rҫҖ¶аҸҪРЕөАЯMРРЎЈ
1.2 ISAC ҫWҪjЕcПөҪyФOУӢ
ФЪНЁРЕёРЦӘТ»уw»ҜПөҪyЦР,ҙжФЪҶО»щёРЦӘәНлp»щёРЦӘғЙоҗ»щұҫРО‘B,ИзҲD3 ЛщКҫЎЈ

ҲD3 НЁёРТ»уw»ҜПөҪyЦРөДғЙ·N»щұҫРО‘B
ҶО»щёРЦӘЦёёРЦӘ°lЙдҷCЕcҪУКХҷCМҺУЪН¬Т»О»ЦГ,ёРЦӘРЕМ–ҝЙТФІЙУГ”ө“юмoәЙ,ТтҙЛФ“ёРЦӘ№ҰДЬІ»ПыәДНЁРЕЩYФҙЎЈН¬•r,УЙУЪКХ°lН¬Фҙ,І»ҙжФЪН¬ІҪөИ·ЗАнПлТтЛШҶ–о},ЖдёРЦӘЛг·ЁҸНлs¶ИЎў№АУӢҫ«¶ИөИЭ^әГ;УЙУЪІЙУГЧФ°lЧФКХ,ЖдҝЙМҪңyөДРЕМ–ҪЗ¶И·¶ҮъЕcӯhҫіИлЙдҪЗҸҠПакP,ёРЦӘТ•ҪЗ·¶ҮъКЬДҝҳЛОпуwІДЩ|ј°·ЕЦГҪЗ¶ИөДУ°н‘Э^ҙу;Жд»ШІЁРЕМ–ҙуІҝ·Ц·ЦБҝһйТ»ҙО·ҙЙдҸҪ,қMЧгАЧЯ_јЩФO,ФЪЗуҪв•r,ІЎ‘B·ҪіМөДҶ–о}Э^РЎ,ёРЦӘҪY№ыөДЗуҪвҫ«¶ИЭ^ёЯЎЈ
лp»щёРЦӘЦёҪУКХҷCЕc°lЙдҷCМҺУЪІ»Н¬О»ЦГ,ёРЦӘРЕМ–РиІЙУГҢЈУГҢ§оl»тТСЦӘРЕМ–,ТтҙЛФ“ёРЦӘ№ҰДЬРиТӘПыәДНЁРЕЩYФҙЎЈН¬•r,УЙУЪКХ°lІ»Н¬Фҙ,ҙжФЪН¬ІҪЎўПаФлөИ·ЗАнПлТтЛШҶ–о},ЖдёРЦӘЛг·ЁҸНлs¶ИЎў№АУӢҫ«¶ИөИЭ^Іо,РиТӘЭ^ҸНлsөДРЈңКЛг·ЁјУТФМҺАн;ІЙУГЧФ°lЛыКХДЬүтМҪңyөДӯhҫіҪЗ¶ИЭ^ҙу,ІўЗТлSЦшҪK¶ЛөДТЖ„У,ёРЦӘТ•ҪЗУРЭ^ҙуёІЙw;БнНв,Жд»ШІЁРЕМ–өД·ЦБҝШSё»,ҫЯУРҙуБҝ¶аҙО·ҙЙдҸҪЗТ№ҰВКЭ^ёЯ;ФЪё»ЙўЙдөДіЗКРҝХйgЦР,ҙуБҝ¶аҙО·ҙЙдҸҪ•юТэИлІЎ‘B·ҪіМ,Ң§ЦВМ“”MӯhҫіЗуҪв•rіц¬FУ°ЧУҝХйgј°еeХ`ҪвЎЈҶО»щЕcлp»щёРЦӘПакPРО‘BҢҰұИИзұн1 ЛщКҫЎЈ

ұн1 НЁёРТ»уw»ҜПөҪyғЙ·NРО‘BұИЭ^
ТЖ„УНЁРЕҫWҪjТІһйәПЧчёРЦӘМṩБЛҫЮҙуөДҷC•юәНәГМҺЎЈ№қьcйgНЁЯ^ТЖ„УҫWҪj№ІПнёРЦӘҪY№ы,¶аӮҖҫWҪj№қьc(»щХҫ(Base Station,BS)ЎўУГ‘фФOӮд(User Equipment,UE)өИ)Ўў¶а‘B(ҶО»щЎўлp»щәН¶а»щ)ҝЙТФЧчһйТ»ӮҖНкХыөДёРЦӘПөҪy°l“]ЧчУГ,Ф“…fЧчНЁЯ^ёРЦӘ”ө“юИЪәП,ҪөөНБЛңyБҝөДІ»ҙ_¶ЁРФ,ІўМṩБЛёьҙуөДёІЙw·¶ҮъТФј°ёьёЯөДёРЦӘҫ«¶ИәН·ЦұжВКЎЈ
2 НЁРЕҫWҪjёРЦӘёЯҫ«¶ИӯhҫіЦШҳӢ
НЁРЕёРЦӘТ»уw»ҜТСҪӣұ»№«ХJһйКЗ6G өДкPжIјјРgЪ…„ЭЦ®Т»ЎЈұҫОДкUКцБЛИзәО‘ӘУГ6G НЁРЕёРЦӘТ»уw»ҜјјРgЯMРР»щУЪНЁРЕјЬҳӢөДёЯҫ«¶ИёРЦӘәНӯhҫіҫ«ҙ_ЦШҪЁ,ІўЯMТ»ІҪЭoЦъНЁРЕЎЈёРЦӘӯhҫіРЕПўөДТэИлК№НЁРЕЦРөДРЕөАЦШҳӢіЙһйҝЙДЬЎЈҫЯуwҒнХf,ӯhҫіРЕПўәНЦШҳӢРЕөАУРЦъУЪІЁКшҢҰңКЎўҪөөНжңВ·№КХП,ҸД¶шп@ЦшҪөөННЁРЕй_дNЎЈҫWҪjөДёЯҫ«¶ИёРЦӘӯhҫіЦШҳӢЦчТӘУЙТФПВІҪуEНкіЙ:КЧПИ,»щХҫ»тУГ‘фФOӮдНЁЯ^ІЁКш’ЯГиөГөҪёРЦӘ»ШІЁ”ө“ю,АыУГ»ШІЁ”ө“юЯMРРЙўЙдьcМбИЎ;УЙУЪ¶аҙО·ҙЙдәНФлВ•өДҙжФЪ,К№УГ°лҸҪлxИәЦөһVІЁЖчөИһVІЁЛг·ЁИҘіэІҝ·ЦМ“јЩьc;И»әуҢўҹoұO¶ҪҫЫоҗЛг·ЁәНЙўЙдуwМбИЎ·Ҫ·ЁҪYәП,«@ИЎӯhҫіөДёЯјүХZБxРЕПў;ҢўМбИЎөҪөДёЯјүХZБxРЕПўЯMРР¶аХҫ”ө“юИЪәП,ҪЁБў¶аХҫёРЦӘ”ө“юөДЦШҳӢӯhҫі;Чоәу,»щУЪЦШҳӢӯhҫіЧцЙдҫҖЧ·Ыҷ,ҢҚ¬FНЁРЕРЕөАЦШҪЁ,ИзҲD4 ЛщКҫЎЈ
ҲD4 ҫWҪjёРЦӘ”ө“юИЪәП
2.1 ·ЗұO¶ҪҫЫоҗЛг·Ё
ёРЦӘ”ө“ю·ЦёоНЁіЈ·ЦһйУРұO¶ҪәНҹoұO¶ҪғЙ·N·Ҫ·ЁЎЈ¬FҪсБчРРөДұO¶Ҫ”ө“ю·Цёо·Ҫ·ЁНЁіЈ»щУЪЙо¶ИҢWБ•(ИзPointNetЎўGraph-PointNetЎўPoint Cloud TransformerөИ)ЎЈИ»¶ш,¬FлA¶ОлҠҙЕёРЦӘ”ө“юјҜәЬЙЩ,”ө“ю·ЦёоНЁіЈРиТӘьc»тПсЛШјүөДҳЛЧў,лҠҙЕёРЦӘ”ө“юөДлyТФҪвбҢРФҳOҙуөШФцјУБЛ”ө“юҳЛЧўөДА§лy;Н¬•r,ҙуІҝ·ЦлҠҙЕёРЦӘ”ө“ю№МУРөДПЎКиРФҢ§ЦВДҝҳЛҝХйgМШХчҒGК§,Йо¶ИҢWБ•оҗөД·ЦёоЛг·ЁНЁіЈРиТӘҢWБ•ДҝҳЛөДҝХйgМШХч,ТтҙЛ,ФЪ®”З°ЗйӣrПВ,ұO¶Ҫоҗ·Ҫ·ЁҢҰУЪлҠҙЕёРЦӘ”ө“ю·ЦёоІўІ»КЗТ»ӮҖЭ^әГөДЯx“сЎЈФЪұҠ¶аөД·ЗұO¶ҪЛг·ЁЦР,ёЯЛ№»мәПДЈРН(Gaussian Mixture Model,GMM)[10]ФҮҲDХТөҪ¶аҫSёЯЛ№ДЈРНёЕВК·ЦІјөД»мәПұнКҫ,ҫЯУР”MәПіцИОТвРО оөД”ө“ю·ЦІјөДғһьcЎЈІўЗТёЯЛ№»мәПДЈРНЧчһйТ»ӮҖЬӣЕР¶ЁөДЛг·Ё,ЖдГҝӮҖ”ө“юҳУұҫ¶јұ»ЦёЕЙБЛТ»ӮҖҫЫоҗ·ЦҪM,Н¬•rЯҖЦё¶ЁБЛФ“ҫЫоҗ·ЦҪMөДёЕВКТФј°ҢЩУЪЖдЛьҫЫоҗ·ЦҪMөДёЕВКЎЈЯ@·N»щУЪ”ө“ю·ЦІјөДёЕВКЧчһйЦГРЕ¶ИҝЙТФУРР§МбЙэӯhҫіЦШҳӢҫ«¶И,ТтҙЛёЯЛ№»мәПДЈРНЛг·ЁҝЙұ»УГУЪҢҚ¬FлҠҙЕёРЦӘ”ө“юөДҫ«ҙ_·ЦёоЎЈ
ёЯЛ№»мәПДЈРНөД»щұҫЛјПлКЗУГ¶аӮҖёЯЛ№·ЦІјәҜ”өИҘҪьЛЖИОТвРО оөДёЕВК·ЦІј,ТтҙЛёЯЛ№»мәПДЈРНКЗУЙ¶аӮҖҶОёЯЛ№·ЦІјҪMәП¶шіЙ,ГҝТ»ӮҖҫЫоҗ·ЦҪMҪРЧчТ»ӮҖҪMјю,Я@Р©ҪMјюҫҖРФјУәНјҙһйёЯЛ№»мәПДЈРНөДёЕВКГЬ¶ИәҜ”өЎЈјЩ¶ЁҝӮ№ІУРKӮҖҪMјю,өЪkӮҖҪMјюөДҫщЦөһйҰМk,ҳЛңКІоһйЎЖk,ёЯЛ№»мәПДЈРНөДёЕВКГЬ¶ИәҜ”өИ繫КҪ(1)ЛщКҫЎЈ
ЖдЦРҰХkһйөЪkӮҖёЯЛ№өДёЕВК(УЦ·QПИтһ·ЦІј),қMЧгҰХkЈҫ 0 ЗТ=1ЎЈНЁЯ^ЧоҙуЖЪНы(Expectation Maximization,EM)Лг·ЁЗуҪвёЯЛ№»мәПДЈРНөД…ў”өЎЈ
2.2 лpЦГРЕ¶ИӮчІҘөДЙўЙдуwӯhҫіЦШҳӢ
І»Н¬УЪјӨ№вАЧЯ_ьcФЖ,лҠҙЕёРЦӘ”ө“юөДО»ЦГҫ«ҙ_¶ИКЬІЁКшҢ’¶ИҰИЎўҫалxdәНЕcӯhҫіЖҪГжөДИлЙдҪЗҰБөДҮАЦШУ°н‘[11],ТтҙЛ,НЁРЕҫWҪjЦР¶аХҫёРЦӘ”ө“юИЪәПРиТӘҝј‘]ёчёРЦӘ”ө“юөДҫ«ҙ_¶ИҶ–о}ЎЈ
ёЯЛ№»мәПДЈРННЁіЈ•юҪoөЪiӮҖьc·ЦЕдТ»ӮҖБҝҰХik,ҒнұнКҫҙЛьcҢЩУЪөЪkоҗөДёЕВК,Я@ӮҖ»щУЪ”ө“ю·ЦІјөДёЕВКјҙһйөЪТ»ЦГРЕ¶ИsЎЈН¬•r,УЙУЪлҠҙЕёРЦӘ”ө“юөДО»ЦГҫ«ҙ_¶ИКЬөҪОпАнӮчІҘМШРФөДУ°н‘,өЪ¶юЦГРЕ¶ИtИ繫КҪ(2)ЛщКҫЎЈ
ҝӮЦГРЕ¶ИИ繫КҪ(3)ЛщКҫЎЈ
өЪkӮҖҫЫоҗҙШҪMіЙөДЙўЙдуwөДЦРРД¶ЁБxИзПВ:
ЖдЦР,pikұнКҫҢЩУЪөЪkоҗөДөЪiӮҖьcөДЧшҳЛО»ЦГЎЈ
лpЦГРЕ¶ИӮчІҘЛг·ЁҪЁБўФЪТФЙПСРҫҝ»щөAЙПЎЈӯhҫіЦШҳӢөДіхКј»ҜКЧПИУЙёЯЛ№»мәПДЈРННкіЙ,Н¬•rУЙУЪёЯЛ№»мәПДЈРН…ў”өЗуҪвНк®…,өЪТ»ЦГРЕ¶Иұ»іхКј»Ҝ,»щУЪіхКјөДЦШҳӢӯhҫі,»щУЪлҠҙЕӮчІҘМШРФҝЙТФөГөҪөЪ¶юЦГРЕ¶И;И»әу,ҝӮЦГРЕ¶ИөДҪЁБўҝЙТФМбЙэёРЦӘӯhҫіЦШҳӢҫ«¶И,·ҙЯ^ҒнРЈХэөЪ¶юЦГРЕ¶ИЎЈУЙҲD5 ҝЙТФҝҙөҪ,І»”аНЁЯ^СӯӯhөьҙъТФёьРВt,ҝЙМбЙэӯhҫіЦШҳӢҫ«¶ИЎЈлpЦГРЕ¶ИӮчІҘЛг·ЁСӯӯhөьҙъөДҪKЦ№—lјюһй:

ҲD5 лpЦГРЕ¶ИӮчІҘЛг·ЁБчіМ
№«КҪ(5)ЦР,ҰЕһйоAПИФOЦГөДйTПЮЎЈ
3 ФҮтһғИИЭ
3.1 ӯhҫіЦШҳӢҳУҷCј°РЕөАңyБҝ
ұҫОДК№УГ2 ӮҖ10 GHz »щХҫФЪКТНвҲцҫ°ПВ,ТФЧФ°lЧФКХ·ҪКҪНЁЯ^ІЁКш’ЯГиҒнҢҚ¬FӯhҫіЦШҳӢ,НЁЯ^лҠҙЕёРЦӘ”ө“юЦШҳӢөДӯhҫіЕcҢҚлHӯhҫіҢҰұИтһЧCЛг·ЁУРР§РФЎЈН¬•r,ФЪІ»Н¬О»ЦГ·ЕЦГБЛUE,НЁЯ^ҢҰұИФЪҢҚлHӯhҫіЕc»щУЪлҠҙЕёРЦӘ”ө“юЦШҳӢөДӯhҫіңyБҝөДРЕөА,тһЧCёРЦӘӯhҫіЭoЦъНЁРЕөДҝЙРРРФЎЈ»щХҫ…ў”өИзұн2 ЛщКҫЎЈ

ұн2 »щХҫёРЦӘ…ў”өЕдЦГ
»щХҫҢҚОпҲDИзҲD6 ЛщКҫ,ІЙУГ°lЙдМмҫҖЕcҪУКХМмҫҖ·ЦлxЎўҷCРө’ЯГиөД·ҪКҪҢҚ¬FҢҰЦЬҮъӯhҫіөДёРЦӘЎЈ

ҲD6 »щХҫҢҚОп
ёРЦӘКТНвҲцҫ°ј°BSЎўUE О»ЦГИзҲD7 ЛщКҫЎЈКТНвёРЦӘҲцҫ°һйөдРНөДҪЦөА,ІјЦГБЛғЙӮҖ»щХҫ,·Ц„eНЁЯ^ЧФ°lЧФКХҢҚ¬FҫWҪj»ҜёРЦӘ,ТФМбЙэёРЦӘөД·¶ҮъәНҫ«¶ИЎЈН¬•r,ФЪБнТ»—lҪЦөА·ЕЦГБЛғЙӮҖUE,НкіЙңyБҝРЕөА”ө“юІЙјҜ,УГУЪтһЧC»щУЪёРЦӘӯhҫіөДРЕөАЦШҳӢөДңКҙ_РФЎЈ

ҲD7 ёРЦӘКТНвҲцҫ°ј°BSЎўUE ”[·ЕО»ЦГ
3.2 ӯhҫіј°РЕөАЦШҳӢ
ҶОХҫәН¶аХҫӯhҫіЦШҳӢҪY№ыИзҲD8 ЛщКҫ,ұҫОДөДӯhҫіЦШҳӢЛг·ЁДЬүтҢҚ¬FөдРНҪЦөАҲцҫ°өДҫ«ҙ_ЦШҪЁЎЈ
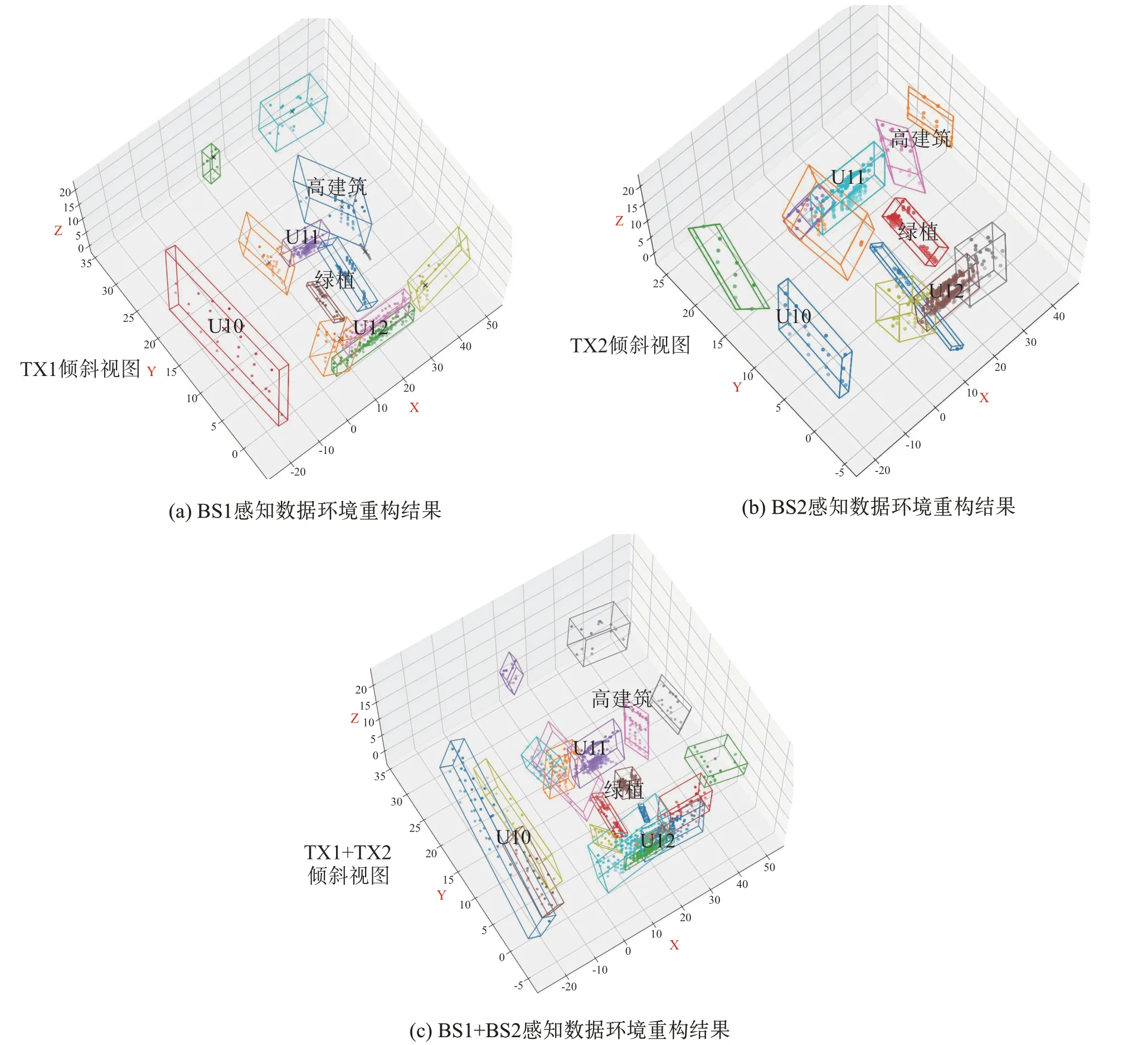
ҲD8 ёРЦӘ”ө“юӯhҫіЦШҳӢҪY№ы
УЙУЪҫGЦІөДХжҢҚО»ЦГлyТФҙ_¶Ё,ТтҙЛӯhҫіЦШҳӢҫ«ҙ_¶ИөДәвБҝҳЛңКһйЦШҳӢӯhҫіПВөДҪЁЦюОпU10ЎўU11 әНU12 үҰГжөДО»ЦГәН·ЁҫҖ·ҪПтЕcХжҢҚӯhҫіөДЖ«ІоЎЈӯhҫіЦШҳӢөДҫ«ҙ_¶ИИзұн3 ЛщКҫЎЈ
ұн3 ӯhҫіЦШҳӢҫ«ҙ_¶И
UE өДНЁРЕРЕөАЦШҳӢҪY№ыИзҲD9 ЛщКҫ,ЖдЦРЎ°ЎБЎұ·ыМ–ұнКҫңyБҝРЕөАҪY№ы,ИэҪЗРО·ыМ–ұнКҫЦШҳӢРЕөАҪY№ы,ЦШҳӢРЕөАҫщһйТ»ҙО·ҙЙдҸҪ;ЦШҳӢРЕөА…ў”өЦРөДіц°lҪЗ(Angle of Departure,AoD)әН•rСУЕcңyБҝЦөЭ^һйОЗәПЎЈ
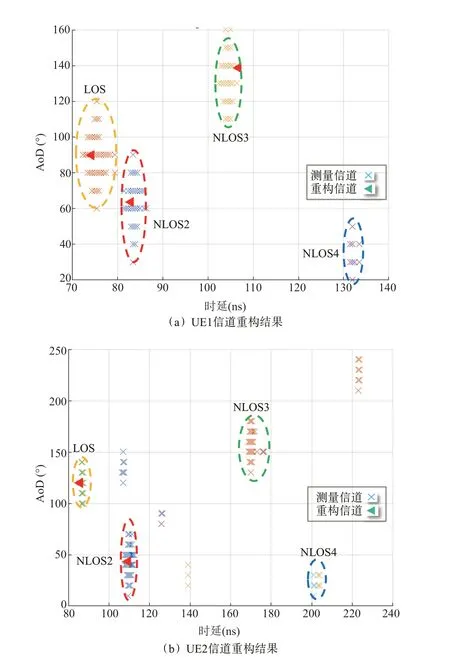
ҲD9 ңyБҝРЕөАЕcЦШҳӢРЕөАҢҰұИ
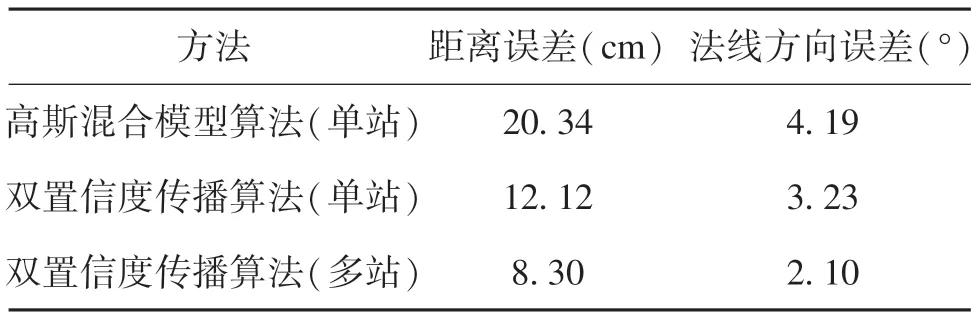
ҢҰҙЛ,ҪyУӢБЛЦШҳӢРЕөАЕcңyБҝРЕөА…ў”өөДХ`Іо,Изұн4 ЛщКҫЎЈЖдЦРТ•ҫа(Line of Sight,LOS)өДРЕөАЦШҳӢХ`ІоһйңyБҝРЕөАЕcНЁЯ^BS әНUE ХжҢҚО»ЦГУӢЛгіцөДРЕөАөДІоЦө,І»°ьә¬ӯhҫіЦШҳӢөДХ`Іо;·ЗТ•ҫа(Non Line of Sight,NLOS)өДРЕөАЦШҳӢХ`ІоһйТ»ҙО·ҙЙдөДңyБҝРЕөАЕc»щУЪЦШҳӢӯhҫіЧчЙдҫҖЧ·ЫҷөДЦШҳӢРЕөАөДІоЦөЎЈҝЙТФҝҙөҪ,»щУЪЦШҳӢӯhҫіөДТ»ҙО·ҙЙдҸҪөДРЕөА•rСУХ`Іо·ЗіЈҪУҪьңyБҝРЕөА,ЙхЦБРЎУЪLOS өД•rСУХ`Іо,ҝЙТФҢҚ¬FЭ^ёЯҫ«¶ИөДРЕөАЦШҪЁЎЈ

ұн4 РЕөАЦШҳӢХ`Іо
4 ҪYКшХZ
ISAC ұ»№«ХJһй6G өДкPжIјјРgЪ…„ЭЦ®Т»,ұҫОДҝӮҪYБЛISAC өдРН‘ӘУГҲцҫ°,МбіцБЛ‘ӘҢҰISAC РЕөАФu№А·Ҫ·ЁЎўҝХҝЪФOУӢЎўУІјюВ“әПФOУӢәНҫWҪjЕcПөҪy·ҪГжөДАнХ“Мф‘р,ЙоИл·ЦОцБЛISAC В“әПІЁРОЕcРЕМ–ФOУӢкPжIРиЗу,кUКцБЛҫWҪjЕcПөҪyФOУӢЦРөДНЁРЕёРЦӘТ»уw»ҜөДПөҪyРО‘BЎЈ»щУЪТФЙПАнХ“СРҫҝ,ұҫОДҢўНЁРЕёРЦӘТ»уw»ҜјјРgЯ\УГУЪҢҚЫ`,АыУГНЁРЕФOӮдЯMРРёРЦӘәНӯhҫіЦШҳӢ,Іў»щУЪӯhҫіЦШҳӢҪY№ыҒнЭoЦъНЁРЕ,ФЪҫWҪjёРЦӘЦРтһЧCБЛФЪәБГЧІЁ¶ОҢҚ¬F·ЦГЧјүӯhҫіёРЦӘөДҝЙРРРФәН¶ИјүРЕөАЦШҳӢҪY№ыЎЈ